用PLC主机直接控制四轴系统的方案设计
2016-11-25魏西营
魏西营
摘 要:从FATEK FBs_PLC内部的SoC晶片入手,整合了4组硬体高速脉冲宽度调变输出,使其结构略作调整,用主机直接控制(不使用伺服模块)电机,实现四轴联动的伺服运行控制系统,其频率高达184.32 kHz。在设备制造领域内,使用者采用最经济的方法实现稳定、精准的控制,其有广泛的推广前景。
关键词:高速输出口;四轴联动;硬体高速PWM;伺服运行控制系统
中图分类号:TQ315 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.20.081
文章编号:2095-6835(2016)20-0081-01
可编程序控制器(programmable logic controller),简称PLC,是数字运算的操作系统,被广泛应用于工业控制领域。FBs-PLC特有0.1 ms时基之高速计时器提供误差0.1 ms的计时器和计时到(time-up)的即时中断处理功能。过去,PLC无法胜任精密计时或速度检测的场合,现在均可胜任,而且其功能也不再局限于逻辑控制。因为有高速脉冲输出(HSPSO)单机可作4轴直线补间伺服控制,再加上各轴细致平顺之加/减速功能,可以轻易完成多段变化且平顺、精准的直线路径或定位控制。
1 硬体结构和电气方案设计
根据课题要求,采用FATEK SoC Based 微型PLC作为主控制器,机型为FBs-24MCT。
FBs-PLC的输出(DO):Y0、Y1、Y2、Y3为高速单相频率120 kHz,Y4、Y5、Y6、Y7为中速单相频率20 kHz,Y8、Y9为低速单相频率200 Hz,输出(DO)共8只。
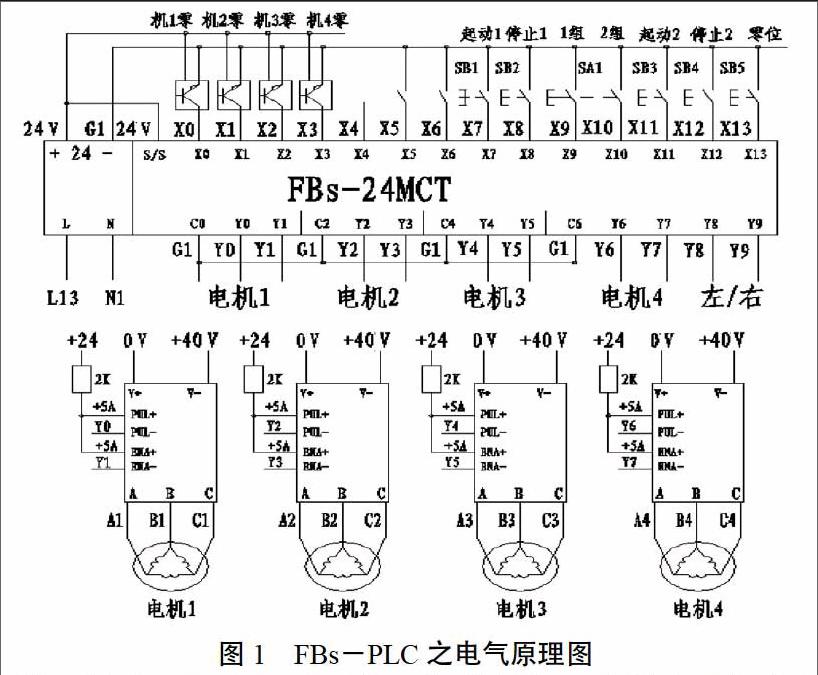
因为课题项目为4轴电机伺服运行的脉冲驱动方式,则Y0、Y1控制电机1,Y2、Y3控制电机2,Y4、Y5控制电机3,Y6、Y7控制电机4.其中,输出(DO)Y4、Y5、Y6、Y7为中速20 kHz的频率没有达到课题项目指标,所以,将FBs-PLC拆开自己调整换位输出(DO)高速芯片Y1、Y3换位中速芯片Y4、Y6。这样,输出(DO)硬体参数达到了课题项目指标,并将电机的驱动方式选择为脉冲+方向控股。FBs-PLC的电气原理如图1所示。
该系统主要是由气动元件、机械部件、步进电动机和零位传感器组成的。根据课题项目的工艺流程,每组2只电机按时序伺服运行,项目中共分2组4轴同时独立工作。
2 项目工艺流程简介
第一组工艺流程:正绕圈、反绕圈、拉尾长、夹工件、切工件、抽芯杆、车头电机1复位(机械部件定位)、丝杆电机2回位(机械部分完成送料及定位)、松工件,往复循环运动。车头电机1零位——上电后系统车头电机1自动复位,车头的机械部件定位准确;丝杆电机2零位——点动复位钮,丝杆电机2移向零位传感位置,按下该钮电机2运行,反之则停止运行,到位后电机2自动停止运行。
在正绕圈和反绕圈时,车头电机1按系统参数高速旋转绕圈,丝杆电机2按参数设定伺服电机1时刻跟随运动。
第二组工艺流程与第一组相同,车头电机3零位——上电后,系统车头电机3自动复位,车头的机械部件定位准确;丝杆电机4零位——点动复位钮,丝杆电机4移向零位传感位置,按下该钮电机2运行,反之则停止运行,到位后电机4自动停止运行。
当车头电机3按照系统参数高速旋转绕圈时,丝杆电机4按照参数设定,伺服电机3时刻跟随运动。主机FBs-PLC遵循各组的工艺流程,系统自动分别控制4轴独立运行。
3 主要参数
根据课题项目的要求,系统采用高性能三相混合式步进电机的Q3HB64MA/B等角度恒力矩细分型驱动器。驱动电压为DC40 V,电流1~5.8 A可调。该驱动器采用类似伺服控制原理的电路,使电机低速运行平稳,无震动和噪声。在电机高速运行时,力距大大高于五相混合式步进电机。其主要引脚功能是,PU为脉冲信号,DR为方向控制信号,高电平为正向旋转,低电平为反向旋转。
步进电机1,2,3,4的最高转速为5 000 r/min,步进电机驱动器的细分为1 000脉冲/转,FBs-PLC输出(DO)Y0、Y2、Y4、Y6的最高输出频率为5 000 r/min×1 000脉冲/转=50 000 000脉冲/分=83.333 kHz。
4 总结
如果配合内建的HHSC作回授,尚可作闭环控制,对诸如元件磨损、老化、不良等作检测和相对的补偿,以获得更精准的控制。同时,还提供定位专用语言配合PLC梯形图的便利指令,以便轻易实现精密定位控制。在人机操作界面方面,通过MODEM拨号可以连接在海外的PLC,直接在办公室就可以实现无线远方修改程式、模拟控制、诊误和监视工作,会使工作变得更加人性化。从技术研发的角度看,很多国家都很重视PLC的开发设计,并将它的发展作为衡量科技发展的重要指标之一。
