关节式坐标测量机虚拟样机建立及采样点推广算法
2016-11-24万侃然张宏伟龚阳波
胡 毅,万侃然,张宏伟,龚阳波
(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)
关节式坐标测量机虚拟样机建立及采样点推广算法
胡 毅,万侃然,张宏伟,龚阳波
(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)
为了单独分析关节式坐标测量机由圆编码器误差引起的测量误差,排除包括由杆件长度、杆件偏角及环境温度等因素所引起的误差,文章运用虚拟样机技术建立了关节式坐标测量机的虚拟样机模型,并将其与D-H方法建立的测量模型进行了比较验证,结果表明该虚拟样机成功地排除了绝大多数误差源,使得单独分析由圆编码器误差引起的测量空间误差分布成为可能。同时为了解决在空间采集大量均匀点的工作量大及复杂度高的问题,该文提出了一种将采集的一个面上的点推广为整个测量空间的大量点的算法,为下一步分析空间误差分布奠定了基础。
关节式坐标测量机;虚拟样机模型;误差源;采样点推广算法
关节式坐标测量机与传统的正交三坐标测量机相比,具有操作简单、携带方便、测量空间大、测量效率高及对环境要求不高等优点,因此应用较为广泛[1-2]。但由于其属于多级串联式极坐标测量系统,测量误差会逐级积累放大,使得它的精度相对于传统的正交三坐标测量机有一定的差距,制约了其在实际工程中的应用。由于圆编码器在各个角度上的测量误差不同,测量机对空间同一点不同姿态下测量误差也不同,存在最大值;在空间的不同点,这个最大值也是不同的,存在最佳测量区,被测件放置在最佳测量区进行测量,可以提高测量精度[3-4]。文献[5]对双关节ScanMax坐标测量机二维平面上的最佳测量区进行了研究;文献[3]用支持向量机得出了对单点测量及空间距离测量的最佳测量区以及相应的数学模型;文献[6]的研究表明关节一选择最佳初始位姿可以有效地提高测量精度。所以分析圆编码器误差对测量误差的影响很有必要。
关节式坐标测量机的结构如图1所示,主要包括基座、立柱、2个测量臂、6个关节及测头。其测量原理为:利用分别安装于6个关节中的圆编码器,将测得的关节转角值和测量机的结构参数带入测量机的运动学模型进行计算,从而得到测头在测量空间中的位置坐标值。其中的6个圆编码器对关节转角值的测量误差会很大程度上影响测量机的精度,在真实测量中存在的测量误差还包含测量机的机械误差以及环境误差等,想要单独分析由圆编码器误差所引起的测量误差则很难。而虚拟样机技术能够分离出绝大多数误差源,为单独分析由圆编码器误差所引起的空间测量误差提供了条件[7]。
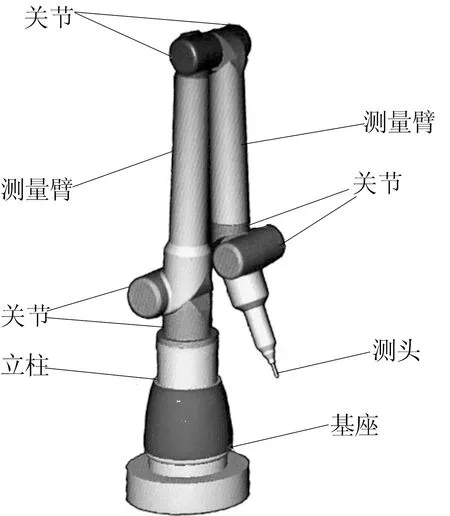
图1 关节式坐标测量机结构
本文基于虚拟样机技术建立了关节式坐标测量机对空间固定点进行采集的虚拟样机模型,并与D-H矩阵转换模型[8-9]进行了正确性验证。运用该虚拟样机模型采集了测量空间内1个面上的分布较为均匀且广泛的采样点,并提出了一种算法将虚拟样机模型采集的采样点推广为在整个测量空间内分布较为均匀的大量点。
1 虚拟样机模型的建立及验证
1.1 虚拟样机模型的建立
由于本文只考虑由圆编码器误差对测量机整体误差产生的影响,将关节变量以外的其余参数全部设为定值。为了使虚拟样机模型符合在测量空间无盲区的条件,虚拟样机各项结构参数的定义见表1所列。
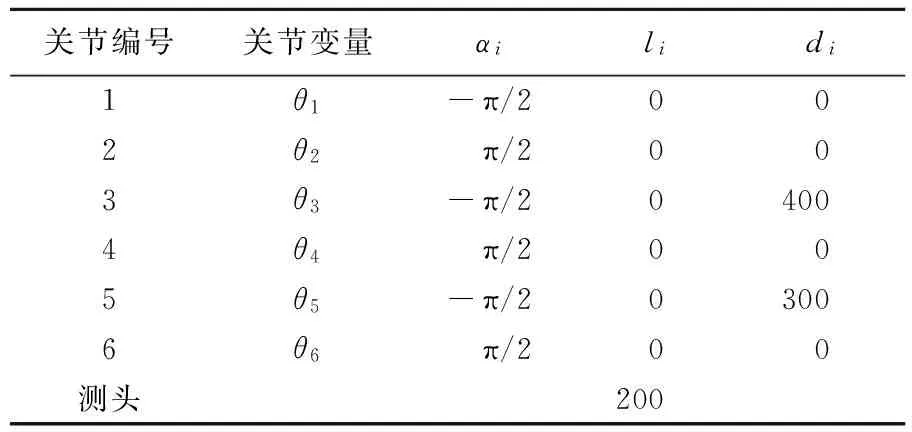
表1 虚拟样机的结构参数定义
本文基于运动学仿真软件ADAMS中的用户界面模块ADAMS-View,建立对空间固定点进行采集的关节式坐标测量机虚拟样机模型。虚拟样机建立的步骤如图2所示。采用自基座向测头逐个搭建的方法,依次搭建各个关节,同时为其添加相应的约束(旋转副),并在约束上添加相应驱动,观察关节是否按正确的方式运动,直至搭建好测头部分,并为测头添加1个球面副而移除了平移副,使得虚拟样机对固定点进行采集时测头始终处于该点。再为虚拟样机添加1个驱动,使之能够像真实测量机采集空间固定点时一样运动,也就是在虚拟样机基座和测头位置不变的情况下,采集6个关节角度5 000种不同的组合,即5 000种姿态。
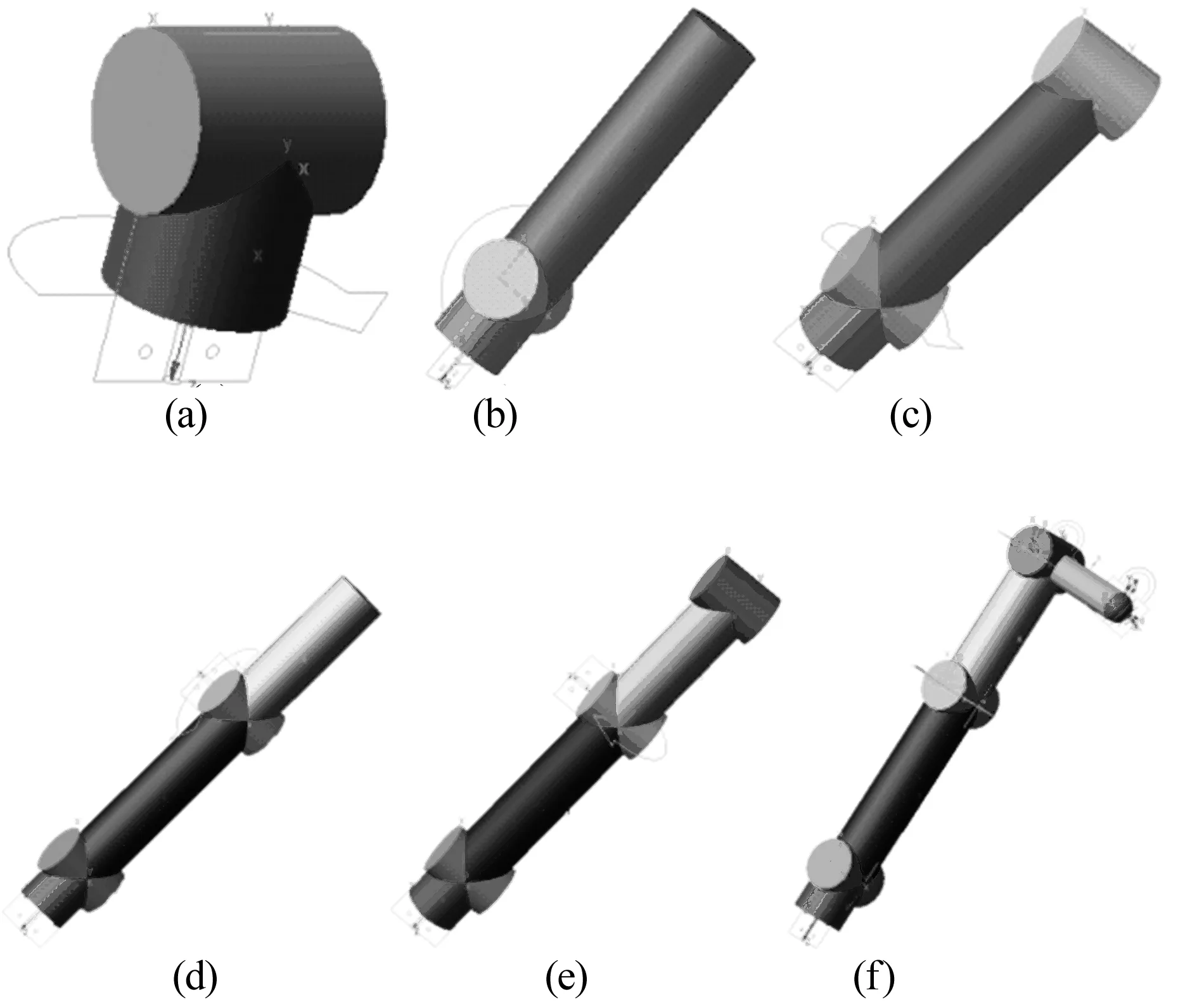
图2 虚拟样机建立步骤
从采集到的5 000种不同姿态中随机选取3种不同测量机姿态,如图3所示。运用上述虚拟样机模型建立步骤,即可建立起对应空间不同点进行采集的各虚拟样机模型。

图3 采集同一点时的3种不同测量姿态
1.2 虚拟样机模型的正确性验证
为了验证虚拟样机模型的正确性,在空间中任取20个点,对于每个点,在后处理模块中获得坐标位置及6个圆编码器的大量角度组合。将大量的圆编码器角度组合代入D-H模型计算出坐标位置。
最后比较直接从后处理模块中获得的坐标位置与用D-H模型计算出的坐标位置。限于篇幅,本文只显示3个点的结果,见表2所列。

表2 3组固定点实验数据比较
从表2中可以看出,两者的偏差极小,这说明虚拟样机模型的建立方法是正确的,并且该虚拟样机模型能够分离绝大多数误差源。
2 采样点推广算法
在ADAMS的用户界面模块ADAMS-View中建立一个能对空间任意固定点进行采集的虚拟样机,需要通过设计好各个关节的初始角度值,使得测头位置正好处在想要采集的固定点上,这样花去的时间与精力要比现实中的测量机要多;与此同时,在后处理模块ADAMS-PostProcessor中得到的每个关节的初始角度都从0开始,但实际上在ADAMS-View中创建的虚拟样机各个关节角度的真实初始值不可能全为0,所以在6个关节角度的数据导出前需要将初始角度值修正到虚拟样机真实的初始值,这样所消耗的时间就更多。
基于以上原因,如果没有高效的采样点推广算法,利用虚拟样机采集空间分布均匀且较广的大量点的效率会特别低。
结合关节式坐标测量机的机械结构特点。测量机以1个固定点绕z轴转360°,测头运动轨迹为1个圆。虚拟样机对该圆上任意一点进行采集,得到的大量角度组合和在该圆上其他点采集的角度组合相比,差距只是第1关节角度有所不同,相差的角度为其中1点绕z轴到另外一点的旋转角度,所以对于空间内的1个采样点,可以将该点的采样数据推广得到该点绕z轴所在圆上其他点的数据。基于以上特征,可以在1个面上均匀采集m个点,然后将每个点推广到其绕z轴所在圆上的n个点,这样就将1个面上的点推广到整个空间。
利用这种方式,设置每旋转10°对点推广1次,则所采集的1个点就能被推广为36个点,如图4所示。
在1个平面上采集169个点,其分布如图5所示。

图4 由采集的单点推广出的36个点的分布

图5 由虚拟样机在yoz平面上所采集的点的分布
将这169个点都进行推广,得到169×36=6 084个空间中的点,如图6所示。
图6 采集的面上点所推广的空间的点分布
这大大地提高了采点效率。设置的采集点和推广倍数越多,空间内测量误差的分布情况越清晰,相应的计算量也越大,后续进行分析的速度也越慢。因此在采集和推广空间点时需综合考虑两者之间的利害,选取既可以较好地代表空间分布误差的情况又能拥有较快运算速度的采集点数量和推广倍数。
3 采样点推广算法效率分析
本文建立了一个对空间单个固定点进行采集的虚拟样机模型,设计好各个关节的初始角度值,使测头位置正好处在采集的固定点上,在得到的5 000组6个关节角度组合的数据导出前将初始角度值修正到虚拟样机真实的初始值,所耗费的时间约为5 min。采集的空间点的覆盖范围越大,耗费的时间越多。在空间中采集不同数目的点时,使用推广算法和不使用推广算法的情况下,分别需要花费的时间见表3所列。

表3 采集不同数目点时推广算法耗费时间 min
从表3可以看出,若不采用推广算法而逐个对空间点进行采集,则耗费的时间很长,且在空间所采集的点越多,利用采样点推广算法所节省的时间量就越大。可见,本文提出的采样点推广算法能大幅度提高对空间大量点的采集效率。
4 结 论
本文基于虚拟样机技术建立了对空间固定点进行采集的关节式坐标测量机虚拟样机模型,并在此基础上设计了测量空间采样点设置方案,该方案设计合理,所采集的点分布较为均匀且广泛;同时提出了由单个面上的点推广到空间点的算法,大幅度提高了计算误差分布的效率,为分析测量机圆编码器误差与关节式坐标测量机空间测量误差分布的关系和进一步研究最佳测量区打下了基础。
[1] 张国雄.坐标测量技术新进展[J].航空精密制造技术,2008,44(3):16-19.
[2] ADAMS L.Competition rising in portable CMMs[J].Quality Measurement Test and Inspection,2002,41(7):18-22.
[3] 郑大腾.柔性坐标测量机空间误差模型及最佳测量区研究[D].合肥:合肥工业大学,2010.
[4] ZHENG D T,DU C T,HU Y G.Research on optimal measurement area of flexible coordinate measuring machines[J].Measurement,2012,45(3):250-254.
[5] LOTZE W.ScanMax-a novel 3D coordinate measuring machine for the shop-floor environment[J].Measurement,1996,18(1):17-25.
[6] 崔亚军,陈青山,祝连庆,等.关节式坐标测量机初始位姿对误差影响研究[J].工具技术,2012,46(7):76-79
[7] 陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005:5-77.
[8] DENAVIT J,HARTENBERG R S.A kinematic notation for lower pair mechanisms based on matrices [J].ASME Journal of Applied Mechanics,1955,22:215-221.
[9] 程文涛,于连栋,费业泰.关节式坐标测量机参数识别算法研究[J].中国科学技术大学学报,2011,41(1):45-49.
(责任编辑 胡亚敏)
Establishment of virtual prototype of ACMM and algorithm of spreading sampling points
HU Yi,WAN Kanran,ZHANG Hongwei,GONG Yangbo
(School of Instrument Science and Opto-electronic Engineering, Hefei University of Technology, Hefei 230009, China)
Virtual prototype of articulated coordinate measuring machine(ACMM) is established by applying the virtual prototyping technology in order to separately analyze the measurement error generated by circle optical grating encoder error and remove the errors caused by lever length, lever angle and ambient temperature. The virtual prototype of ACMM is compared with the measurement model built by the D-H method to verify the correctness of it. The results show that the virtual prototype eliminates most of the error sources so that the distribution of the measurement error in whole space generated by circle optical grating encoder error can be separately analyzed. And an algorithm to collect lots of points in the space by collecting points in a plane is proposed in order to solve the large workload and high complexity of collecting a large number of uniform points in the space, thus laying the foundation of the further research on the measurement error in the whole space.
articulated coordinate measuring machine(ACMM); virtual prototype; error source; algorithm of spreading sampling point
2015-04-21;
2015-06-27
安徽省自然科学基金资助项目(J2014AKZR0032)
胡 毅(1961-),女,安徽合肥人,博士,合肥工业大学副教授,硕士生导师.
10.3969/j.issn.1003-5060.2016.10.006
TH721
A
1003-5060(2016)10-1327-04
