基于模式切换的汽车自适应巡航系统分层控制
2016-11-24孙晓文汪洪波
孙晓文,汪洪波
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于模式切换的汽车自适应巡航系统分层控制
孙晓文,汪洪波
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
汽车自适应巡航系统通过分层控制即上层控制器向下层控制器(节气门或制动执行器)发出指令,实现汽车自动加速、减速或保持车速不变,以保持后车与前车间的期望距离。文章将自适应巡航汽车的控制模式划分为速度控制模式和车距控制模式,考虑到2种模式之间的博弈,根据车距与相对速度之间的关系建立2种模式之间的切换策略,以实现速度控制模式和车距控制模式间的平稳切换;再利用PI(proportional integral)控制和模糊控制对期望加速度进行控制,完成上层控制器的建立;根据刹车油门切换逻辑区分期望加速度和期望减速度,建立下层控制;最后利用CarSim和Matlab/Simulink软件对自适应巡航汽车的行驶工况进行联合仿真,仿真结果表明该控制策略能使后车较为稳定地跟踪前车。
自适应巡航控制(ACC);分层控制;模式切换;CarSim软件;模糊控制
0 引 言
自适应巡航控制(adaptive cruise.control,ACC)系统是汽车巡航控制系统的扩展,可以根据前车的驾驶状况对汽车进行自动调整,即加速、减速或保持车速,以保证与前车间的期望距离,达到安全行驶的目的。
在汽车自适应巡航系统的研究中,核心内容是车距控制策略和模式切换控制策略,国内外在这方面进行了深入的研究。文献[1]采用了带有起停功能的非线性模型预测控制,在跟踪车速和距离方面表现出较高的效率,但控制过程过于复杂;文献[2]对自适应巡航系统采用了模糊控制,使其有较好的鲁棒性,但考虑因素较少;文献[3]运用多模式切换控制,使ACC车辆模式切换的准确性和输出连续性都得到了一定程度的提高;文献[4]采用一种简化非线性模型设计自适应油门控制器,但是未考虑ACC系统模式切换对汽车的影响;文献[5]提出了运用增量式算法内核的位置式输出控制器优化油门控制器的方法,使控制模式切换更加稳定。因此,为了保证ACC模式的有效切换,同时考虑到控制系统结构的层次分明性,需要对分层控制和模式切换重点进行研究。
本文将ACC系统进行分层控制,上层控制器确定控制模式,求解汽车的期望加速度,下层控制器根据上层指令执行节气门或制动控制,采用CarSim和Matlab/Simulink进行联合仿真,并对仿真结果进行分析。
1 汽车动力学建模
采用CarSim建立汽车动力学模型,CarSim建立的汽车动力学模型考虑因素较为全面,含有车身、空气动力学数据、传动系统、转向系统、制动系统、悬架系统以及轮胎等部分,具有较高的仿真精度,而且具有实时性,运算迅速。考虑2辆汽车的模型,即前方目标汽车和后方跟踪汽车。前方目标汽车为CarSim中模型汽车——B-Class(Sports car),发动机功率为125 kW,变速器为6挡变速,制动系统带有防抱死系统;后方跟踪汽车为E-class(Sedan),其中发动机功率为250 kW,变速器为7挡变速,制动系统带有防抱死系统,其他参数采用软件默认设置。
2 汽车自适应巡航系统设计
汽车自适应巡航控制器由上层控制器和下层控制器组成,实现自适应巡航汽车的分层控制。上层控制器将自适应巡航汽车的控制模式划分为速度控制模式和车距控制模式,求出不同模式下的期望加速度,发送到下层控制器中,区分出期望加速度和期望减速度,再输入到CarSim建立的汽车动力学模型中,最终确定汽车加速、减速或保持车速不变,进而实现ACC汽车车速的自适应调整。汽车自适应巡航控制系统示意图如图1所示。
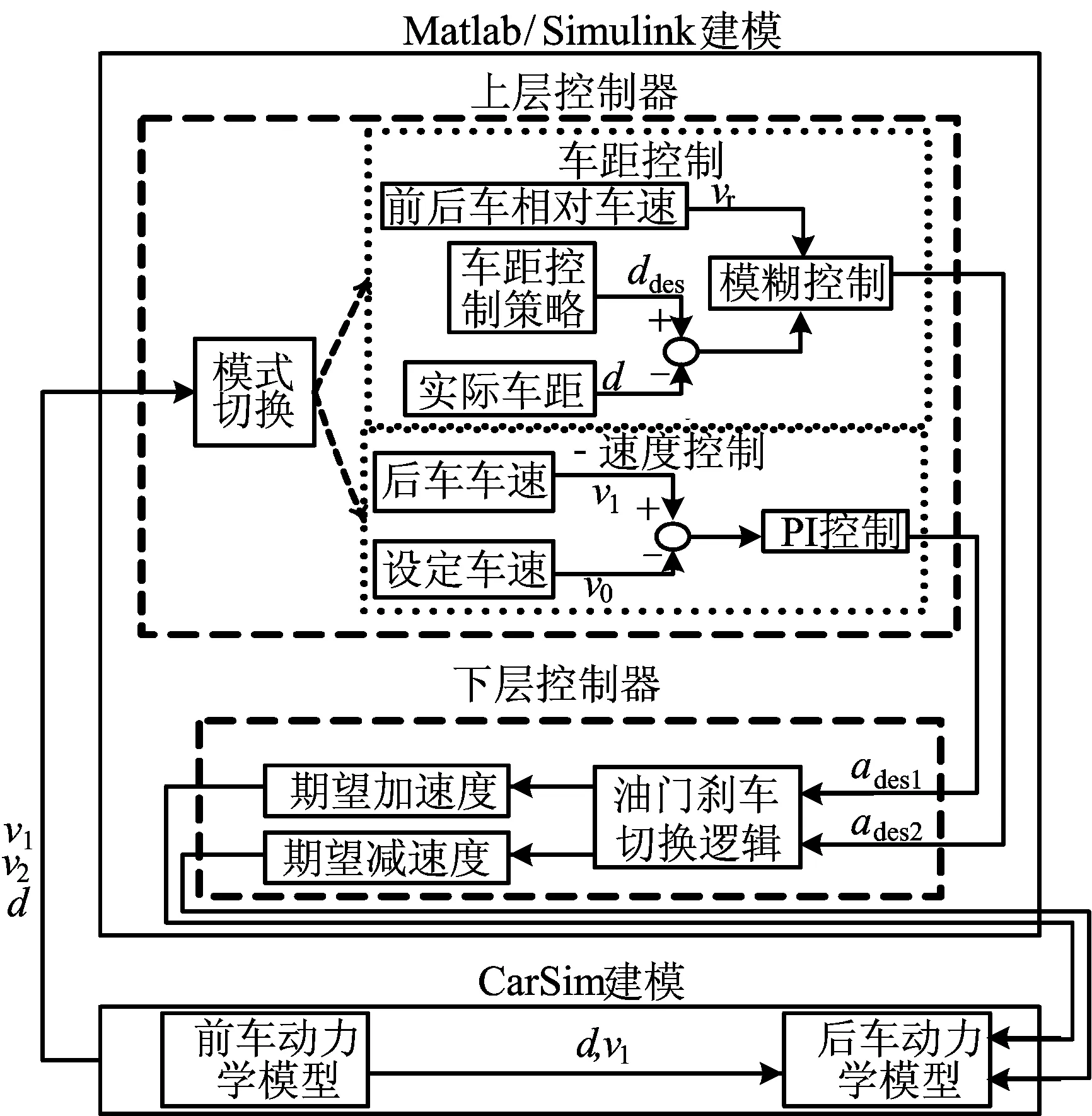
图1 汽车自适应巡航控制系统
图1中,vr为相对车速;v1为前车车速;v2为后车车速;v0为设定车速;d为实际车距;ddes为车距控制策略所求的期望车距;dr为相对车距;ades1为速度控制模式下的期望加速度;ades2为车距控制模式下的期望加速度。
2.1 ACC系统上层控制器设计
2.1.1 ACC汽车控制模式的切换
速度控制模式即定速巡航模式,执行时只需控制节气门开度达到设定的车速即可,而制动力输出为0;切换为车距控制模式时既要考虑节气门开度,又要考虑制动力的输出,从而控制本车车速,使前、后车的实际距离与设定的期望距离相接近。
期望距离采用固定时距的控制策略确定,计算公式为:
(1)

模式切换时,考虑到2种模式间存在博弈,在一定程度上影响汽车的安全性和舒适性,故根据文献[6]采用的车距-相对速度(dr-vr)图来划分速度控制和车距控制。dr-vr关系如图2所示。
转变线公式为:
dr=kvr+d0
(2)
其中,k为转变线的斜率;d0为期望极限车距,即当前车和后车速度相等时的车距。可通过设定d0和k来确定转变线公式。
图2中,当自适应巡航车载雷达实际探测距离大于在同一相对速度下的转变线上的相对距离时,即在区域1,则对该车进行速度控制;反之,处在区域2时,自适应巡航汽车应转换为车距控制。速度控制和车距控制之间的切换策略如图3所示。
2.1.2 各模式下期望加速度的控制
在速度控制模式中,前方没有目标或目标车速大于本车车速时,本车按照驾驶员事先设定的车速行驶,无需制动。对速度误差进行PI(proportional integral)控制,则期望加速度为:
(3)
其中,v为自车车速;vdes为驾驶员设定的自车期望车速;kp、ki为比例系数和积分系数。
在车距控制模式中采用模糊控制的方式确定期望加速度[7-9]。模糊控制器的输入量分别是实际距离与期望距离之间的误差dr和相对速度vr,输出为期望加速度a,语言输入、输出变量值均为{NB, NM, NS, ZO, PS, PM, PB},即{负大, 负中, 负小, 零, 正小, 正中, 正大}。其中输入量dr的论域为[-6, 6]、vr的论域为[-2, 2],输出量a的论域为[-8, 8]。输入量隶属度函数和输出量隶属度函数中负大和正大的类型均为高斯隶属函数,其余变量用三角形隶属度函数。
对于控制规则,基于驾驶员经验,主要考虑如下几种情况:
(1) 当相对距离dr很大,而相对速度vr较小时,则输出的加速度值a可适当加大,以减小相对距离,提高交通流量。
(2) 当相对距离dr较小而相对速度vr较大时,则应输出适当大小的加速度a,以保持安全距离。
(3) 当相对距离dr和相对速度vr都较大或较小时,应该对汽车制动,以保持安全。
基于以上考虑,再根据仿真结果加以修改,得出控制规则,见表1所列。
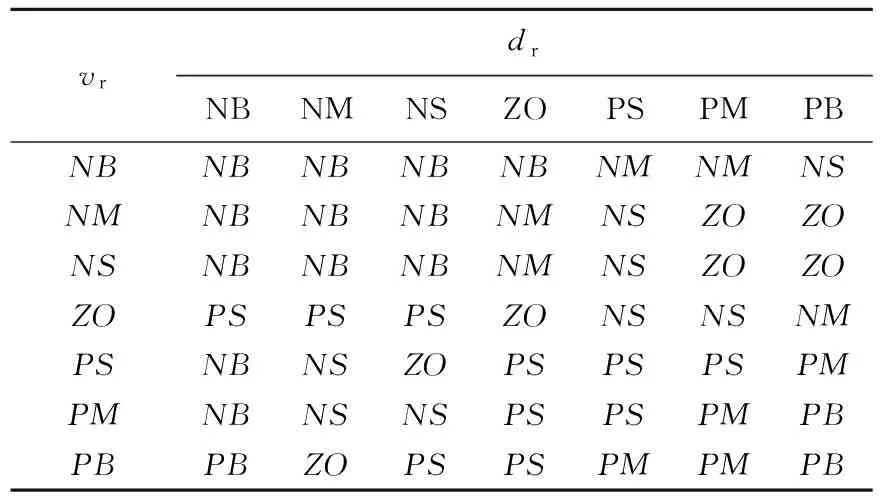
表1 模糊控制规则
在驾驶试验中,对汽车的加速度进行限制以保持良好的平顺性。根据实际驾驶数据[10]可知,驾驶员的最大和最小加速度分别为-5.08 m/s2和3.07 m/s2。由此对上层控制器输出的期望加速度限定为-5 m/s2≤ades≤3 m/s2。
2.2 下层控制器的建立
在下层控制器中,对上层控制器中输出的期望加速度进行划分,即对节气门控制和制动器控制进行划分。根据节气门/制动控制切换时的加速度基准曲线a-v建立节气门/制动切换控制器[11-12],其中为了保证制动和加速切换的平稳性,对加速度基准设立过渡区Δh,当adesi≥a+Δh时为节气门控制,即对自适应巡航汽车进行加速;当adesi≤a-Δh时,进行制动控制;当a-Δh≤adesi≤a+Δh时,进行怠速控制。其中adesi为第i(i=1,2)辆车的期望加速度。
3 仿真结果与分析
采用CarSim和Matlab/Simulink联合仿真,建立自适应巡航控制器。其中,速度控制模式中PI控制器的参数为kp=0.1,ki=0.01。固定时距th=1.5,停车时最小距离d1=12 m,转变线斜率k=-0.8,期望极限车距d0=47.5 m。
3.1 CarSim与Matlab/Simulink联合建模
CarSim与Matlab/Simulink联合模型如图4所示。
该模型主要有4部分:前车动力学模型S函数;后车动力学模型S函数;自适应巡航控制器;雷达模块。其中前车动力学模型和后车动力学模型是由CarSim建立,均输出本车车速和确定位置的x、y坐标及偏航角;前车偏航角和后车偏航角输入到雷达模块中以确定实际车距;前车车速与后车车速输入到自适应巡航控制器中,再结合实际车距求解出期望车距、制动踏板力和节气门开度。
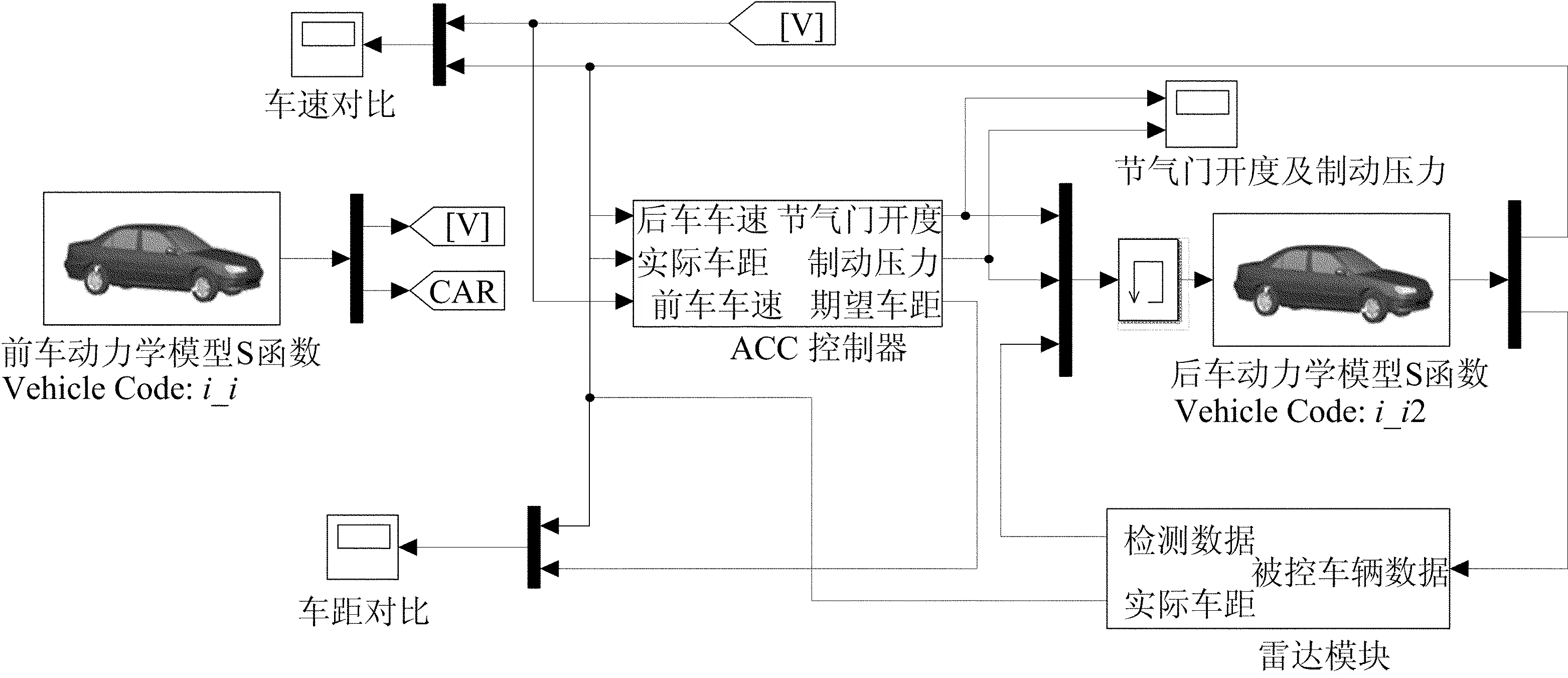
图4 CarSim与Matlab/Simulink联合模型
3.2 行驶工况仿真与分析
仿真中共有前后2辆汽车,考虑到速度控制模式和车距控制模式单独作用以及两者共同作用时的控制效果,对自适应巡航汽车的3种工况(定速巡航工况、跟车工况和复杂工况)进行仿真。
3.2.1 定速巡航工况
定速巡航工况下,自适应巡航汽车只有速度控制模式,前方没有目标车辆,自适应巡航汽车初始速度为60 km/h,设定的目标车速为90 km/h。定速巡航工况仿真结果如图5所示。
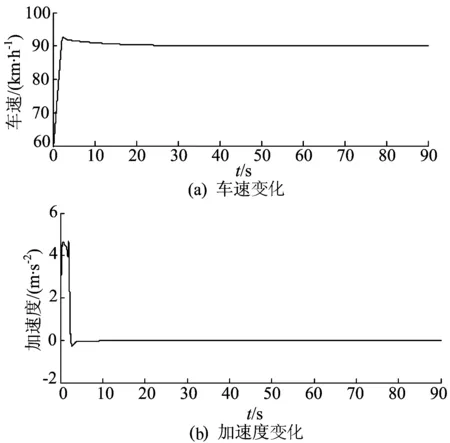
图5 定速巡航工况仿真结果
由图5可以看出,经过PI控制,自适应巡航汽车在约9 s后达到设定车速且车速超调量较小,约为4.4%,并能在随后的时间里保证稳定行驶。另外,在前3 s内,加速度会有较大的波动,随后迅速减小,最终达到0并保持不变。
3.2.2 跟车工况
跟车工况下,只有车距控制模式。前车先以65 km/h的车速行驶,在10 s时开始减速,在20 s时减小到40 km/h,5 s后车速再次减小,于50 s时减小到0,随后再次加速最终达到40 km/h。跟车工况仿真结果如图6所示。
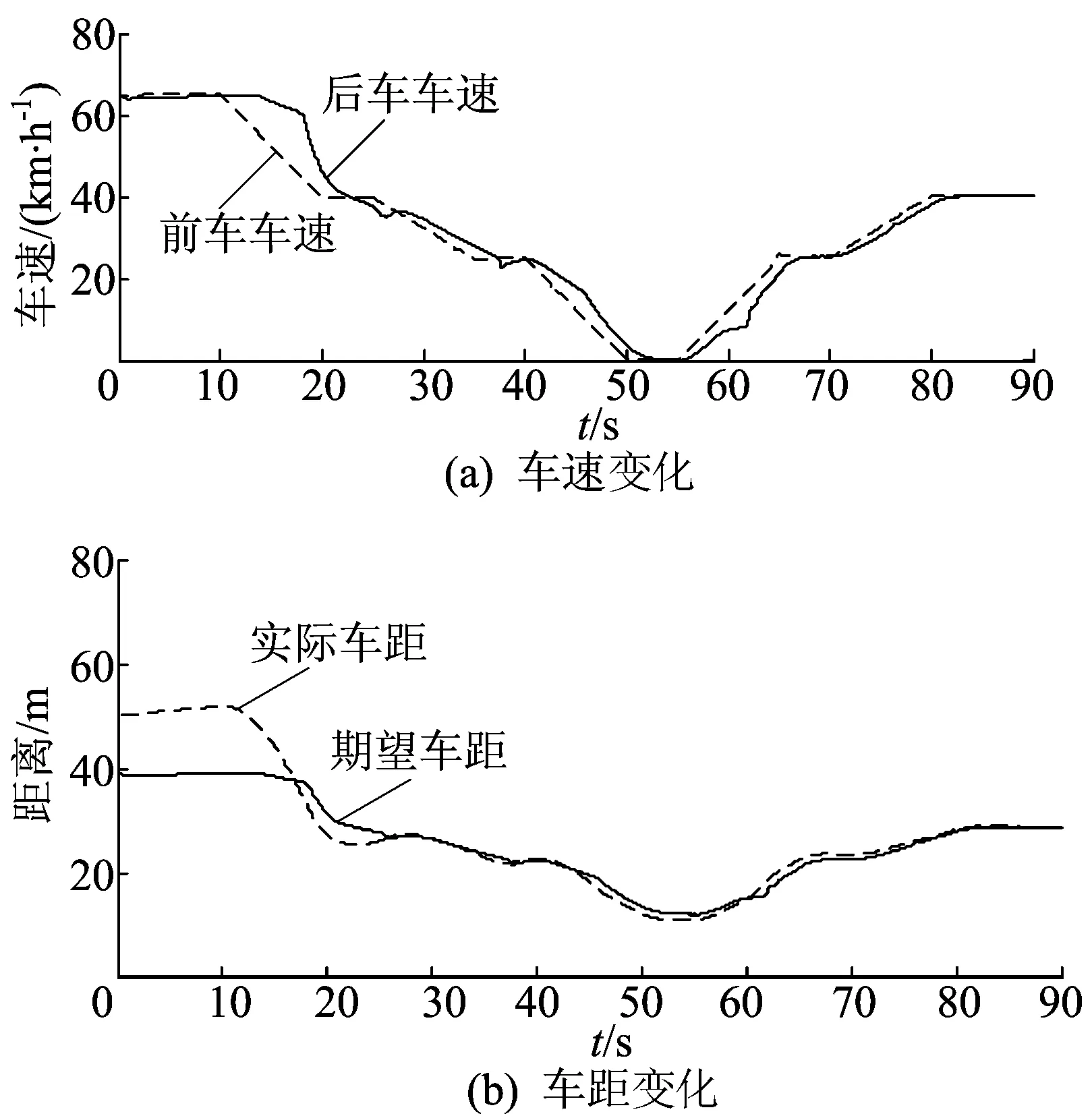
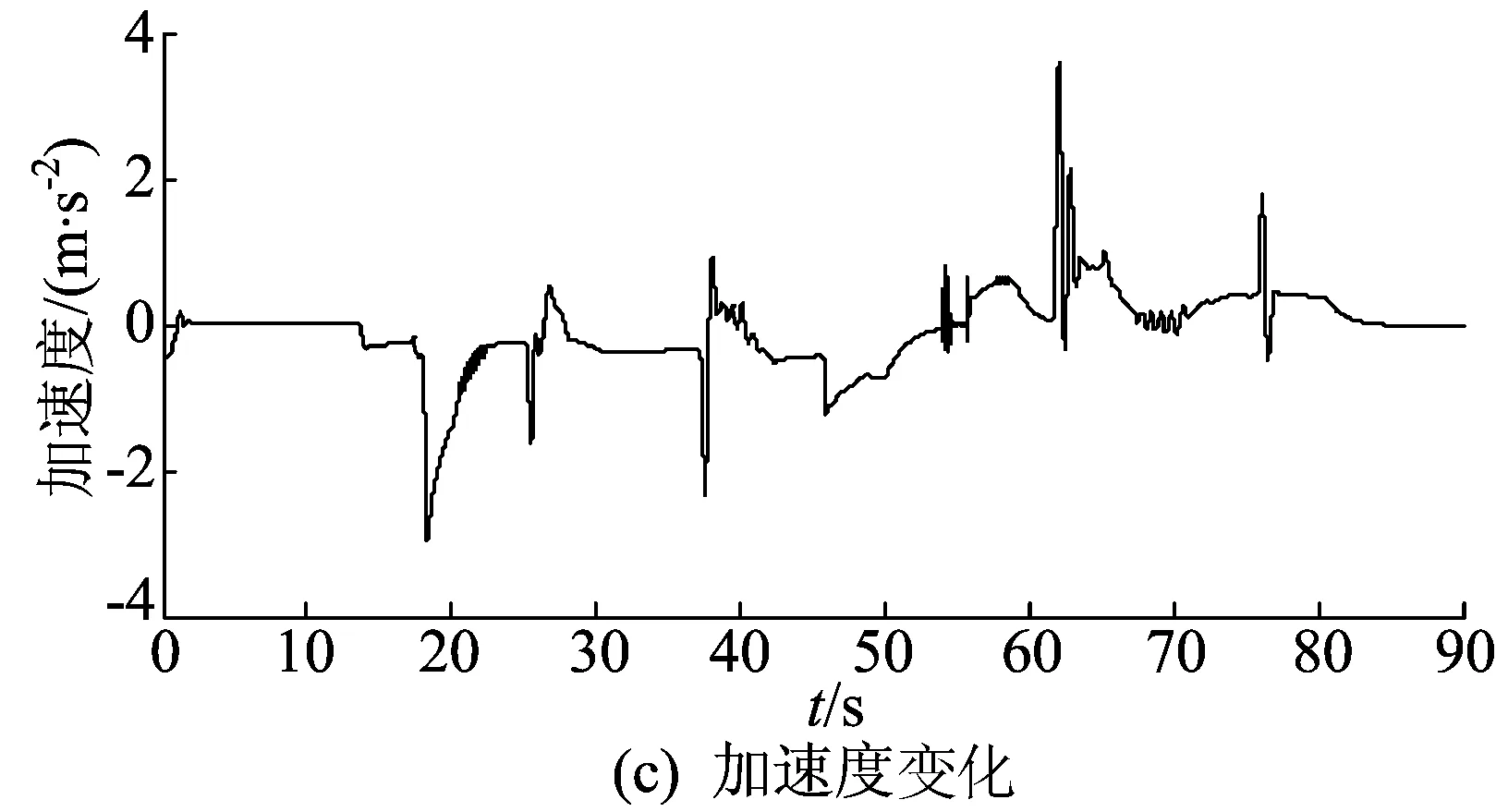
图6 跟车工况仿真结果
由图6可以看出,刚开始时由于仿真设置前车出现在前方50 m处,距离较远,未达到跟车标准,故实际距离大于期望距离;而随着前方车速减小,两车之间的实际距离逐渐减小并于17 s左右开始与期望距离吻合;在随后的行驶中,自适应巡航汽车均能根据前车行驶工况变化做出自动调整,保证实际距离与期望距离之间有着较小的误差,误差基本控制在2 m以内。另外,整个过程中加速度基本维持在-5~3 m/s2之间,满足加速度限定要求。
3.2.3 复杂工况
复杂工况下,自适应巡航汽车的速度控制模式和车距控制模式共同作用。前车初始速度为120 km/h,此后车速经15 s减至30 km/h,保持30 km/h行驶5 s后车速进一步减至0,保持5 s后车速再次加速至120 km/h。自适应巡航汽车先进行速度控制,设定的定速巡航车速为90 km/h,随后在满足模式切换条件时转为车距控制模式,行驶工况较为复杂。复杂工况仿真结果如图7所示。
由图7可以看出,在1~11 s之间,由于两车间的实际车距大于切换条件,故自适应巡航汽车采用速度控制模式;在11~60 s之间,由于前车不断减速,两车车距达到了切换标准,自适应巡航汽车由速度控制模式转换为车距控制模式;在60 s后自适应巡航汽车转为速度控制。由于采用模糊控制,ACC汽车在模式切换后能够及时作出调整,保证实际车距与期望车距能较快地吻合;在前车停车时,两车保持车距接近12 m,符合设定条件,且整个车距控制模式下,其车距误差基本控制在3 m以内。另外,加速度除了在模式切换时有一定的波动,其他时间均维持在-5~3 m/s2之间,符合限定要求。
整个仿真过程表明,基于车距与相对速度关系的模式切换方式是有效可行的,能够使ACC系统根据前车行驶状况准确地作出自适应调整,保证行车安全。
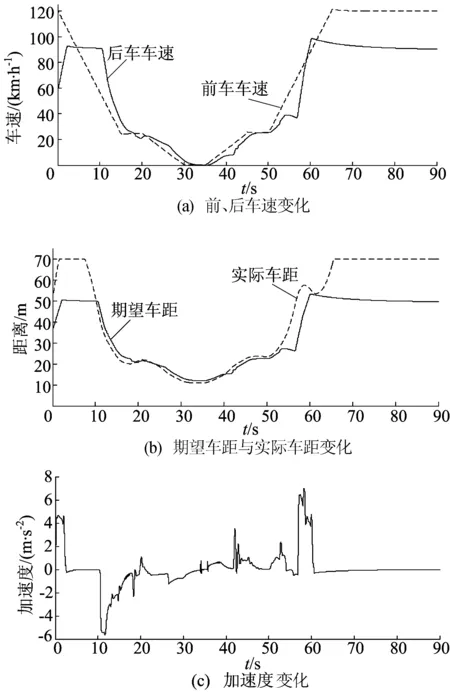
图7 复杂工况仿真结果
4 结 论
(1) 本文在分层控制的基础上对自适应巡航汽车的2种控制模式(速度控制模式和车距控制模式)以及2种模式之间的切换进行了研究,在速度控制模式中采用PI控制对加速度进行控制,使得汽车能够快速达到设定车速;在车距控制模式中采用模糊控制的方法对期望加速度进行控制,使得汽车在模式切换时有较快的响应,也使ACC系统能够根据前车行驶状况的变化及时自动地做出调整,保证跟车行车安全。
(2) 以期望车距与实际车距的误差、ACC汽车的车速变化以及加速度值为依据,对自适应巡航汽车的定速巡航工况、跟车工况和复杂状况进行了仿真分析。仿真结果表明,在速度控制模式中,ACC汽车车速响应较快,能够稳定地保证设定车速;在车距控制中,车距误差较小;同时,根据车距相对速度关系,建立的2种模式切换转变线能够满足自适应巡航汽车在复杂工况下的要求,实现2种模式间的有效切换。综上所述,本文提出的基于模式切换的分层控制策略能够保证自适应巡航汽车的行车安全。
(3) 根据仿真结果还可看出,在车距与车速模式之间发生切换时,加速度会在短时间内超出期望值,对行车舒适性产生影响。2种模式之间的有效博弈将作为今后深入研究的重点,以进一步提高ACC汽车的行驶安全性和乘坐舒适性。
[1] SHAKOUTI P,OTRDYS A,ASKARI M R.Adaptive cruise control with stop&go function using the state-dependent nonlinear model predictive control approach[J].ISA Transactions,2012,51(5):622-631.
[2] JARRAH M A,SHAOUT A.Fuzzy modular autonomous intelligent cruise control (AICC) system[J].Journal of Intelligent and Fuzzy Systems:Applications in Engineering and Technology,2001,11(3/4):121-134.
[3] 裴晓飞,刘昭度,马国成,等.汽车自适应巡航系统的多模式切换控制[J].机械工程学报,2012,48(10):96-102.
[4] 高锋,李克强,王建强,等.车速控制系统自适应油门控制器设计[J].汽车工程,2005,27(4):418-422.
[5] 刘忠海.自适应巡航控制系统设计与仿真[D].北京:清华大学,2005.
[6] RAJAMANI R.车辆动力学及控制[M].王国业,江发潮,译.北京:机械工业出版社,2010.
[7] 王凯,谷正气,杨易,等.自适应巡航系统的自动制动模糊控制器的设计与仿真[J].汽车工程,2010,32(5):418-423.
[8] 李以农,冀杰,郑玲,等.智能车辆自适应巡航控制系统建模与仿真[J].中国机械工程,2010,21(11):1374-1381.
[9] 王坤,冯静安,王卫兵.仿生机器鱼的水下探测和避障控制[J].合肥工业大学学报(自然科学版),2013,36(10):1190-1194.
[10] MOON S,YI K.Human driving data-based design of a vehicle adaptive cruise control algorithm[J].Vehicle System Dynamics,2008,46(8):661-690.
[11] 裴晓飞,刘昭度,马国成,等.基于节气门与制动联合控制的自适应巡航控制系统[J].汽车工程,2013,35(4):375-380.
[12] 侯德藻,高锋,李克强,等.应用于汽车主动避撞系统的车辆纵向动力学模型[J].清华大学学报(自然科学版),2004,44(2):258-261.
(责任编辑 胡亚敏)
Research on hierarchical control of automobile adaptive cruise system based on mode switch
SUN Xiaowen,WANG Hongbo
(School of Machinery and Automobile Engineering, Hefei University of Technology, Hefei 230009, China)
Automobile adaptive cruise system sends commands from the upper controller to the lower controller(throttle or brake controller) through the hierarchical control, which enables the automobile to accelerate, decelerate or keep constant speed automatically in order to maintain the desired distance between the automobiles. The adaptive cruise control modes are divided into the automobile speed control mode and automobile distance control mode. Considering the game between the two modes, the switch strategy is established according to the relationship between the distance and the relative velocity to achieve a smooth switch between the automobile speed control mode and automobile distance control mode. The desired acceleration in different modes is controlled by the proportional integral(PI) control and fuzzy control so as to establish the upper controller. The desired acceleration and desired deceleration are distinguished according to the switching logic between the brake and the accelerator to obtain the lower controller. Finally, the simulation on the adaptive cruise automobile in different conditions is carried out by using the CarSim and Matlab/Simulink software. The results show that the automobile tracks the one ahead steadily by the proposed control method.
adaptive cruise control(ACC); hierarchical control; mode switch; CarSim software; fuzzy control
2015-05-26;
2015-06-23
国家自然科学基金资助项目(51305118);中央高校基本科研业务费专项资助项目(JZ2014HGBZ0374)和江苏省道路载运工具新技术应用重点实验开放基金资助项目(BM20082061504)
孙晓文(1991-),男,山东潍坊人,合肥工业大学硕士生;
汪洪波(1981-),男,湖北崇阳人,博士,合肥工业大学讲师,硕士生导师.
10.3969/j.issn.1003-5060.2016.10.004
U461.99
A
1003-5060(2016)10-1316-06
