融合两类跟踪框架优点的红外目标跟踪算法
2016-11-23朱洪翔张振华
朱洪翔,董 青,张振华
(中国飞行试验研究院,西安 710089)
融合两类跟踪框架优点的红外目标跟踪算法
朱洪翔,董青,张振华
(中国飞行试验研究院,西安710089)
基于粒子滤波的算法模型框架,针对红外的目标成像与背景对比度低、背景复杂等问题,进行提取目标灰度特征,通过对系统概率的密度函数的采样集进行了预测和更新,来逼近系统的后验密度概率,初步确定目标位置,再融合均值漂移算法进行小区域精确搜索,确定目标位置;同时,通过调整均值漂移的算法和函数的带宽,对于红外目标有阻挡情况下的识别能够得到有效处理;通过仿真得到该模型具有算法高效、去除粒子的退化,并且对于有遮挡的红外目标能够进行实时稳定地跟踪。
粒子滤波;均值漂移;红外目标跟踪;抗遮挡
0 引言
在现代红外制导中,红外目标的跟踪技术是其中的一项核心技术[1],具有探测距离远、抗干扰强等优点,已广泛应用在武器制导、电子信息对抗等领域。目标跟踪的算法主要有根据图像识别技术的先识别后跟踪[1]和根据统计理论的滤波技术进行跟踪[2]等思想。先识别后追踪的方法首先对图像进行识别,提取其局部特点,再用匹配的算法对其进行追踪,这种算法的实时性好,易于工程实现,但复杂背景下目标跟踪的鲁棒性较差且红外目标的特征单一,基于优化类框架下建立均值的漂移算法模型[3]是近年来的研究热点。根据统计学粒子的滤波算法模型[4]的目标跟踪方法,虽能够有效解决红外图像中非线性以及非高斯的问题,考虑到样本点数量的增加,算法复杂程度大大提高,从而在红外目标被遮挡时不能实时快速的跟踪目标,造成跟踪失败[5]。本文综合考虑上述两种模型优势,设计具有粒子滤波功能和带有均值漂移特点的算法模型。对于红外条件下跟踪目标的成像与背景对比度低,纹理和轮廓特征都不明显的特点,提取目标灰度特征,通过预测和更新来自于系统概率密度函数,再结合均值漂移模型,在进一步缩小的区域内执行再查询,进而对目标执行更准确的跟踪。此外,均值漂移算法中核函数的带宽即是被跟踪的目标区域,因此在确保准确跟踪目标的同时,还可以利用均值漂移算法的自适应带宽,解决红外目标跟踪中目标被遮挡的问题。
1 算法描述
1.1粒子滤波
在状态矢量为{xk,k∈N}的情况下,系统状态模型为:

式中,xk-1是表示状态的向量,fk:Rnx×Rnv是其非线性的表达方式,{uk-1,k∈N}是一种有关噪声的序列,nx和nv表示的是上述两种向量的维数。同样gk:Rnx×Rnv是xk的非线性表达式,{vk,k∈N}是离散测试噪声集合,nx和nv作为测试向量和测试噪声向量的维数。
结合贝叶斯滤波理论,令{xi0:k,wik}Ni=1为后验的概率密度p(x0:k|z1:k)随机采样集合,x0:k={xj,j=0,1,2,…,k}作为采样样本。{wik,i=1,2,…,Ns}是基于粒子有关的权值集合,该集合满足条件∑iwik=1。则在k时刻的后验概率密度则可以近似为:

其中:wik表示k时刻第i个粒子的权值。根据重要性的采样原理对wik进行分析处理,如果样本来自重要性的密度函数q(x0:k|z1:k),则wik定义为:

展开式(3)可以得到:
先验密度一般由重要性的密度函数来决定,即上式中:
q(xik|xi0:k-1,z1:k)=p(xik|xik-1)(5)
由式(5)、式(4)解算可得到:wik∝wik-1p(zk|xik)(6)
后验滤波估计近似写成:

1.2均值漂移
Mean Shift(均值漂移)通常为“基于优化”类追踪框架的求概率密度的极大值的最佳算法。假设D维空间Rd里含有样本数为n的样本集合{xi,i=1,2,…,n},x点均值的漂移向量表达式如下:

其中:Sh是一个半径为h的高维球区域,即满足Sh(x)={y:(y-x)T(y-x)≤h2}。k表示在Sh区域中落入了样本点xi总数为k。由表达式可以分析出Mh(x)即为概率密度函数的梯度。
在此基础上对独立样本增加Mh(x)的权重系数,从而对Mean Shift表达式进行展开:
其中:G(x)为单位核函数,且GH(xi-x)=。H是正定对称的矩阵,工程上取为H =h2I。w(xi)≥0为采样点i的权重。将式(9)展开可得:
结合上式,假设误差门限为ε,Mean shift算法将按次执行以下步骤,直至条件满足:
(1)计算Mean shift向量mh(x);
(2)将mh(x)赋给x;
2 模型分析
2.1状态模型
通常状态转移模型典型公式为:
xt-xt-1=xt-1-xt-2+ut(11)
目标状态由xt={x,y,hx,hy}来表示,(x,y)作为目标中心点,(hx,hy)则图像区域尺寸参数。
2.2观测模型
红外目标跟踪过程中,由于探测距离远,目标成像一般较小,纹理、边缘及颜色等特征不明显,因此用灰度分布描述红外目标,建立系统观测模型。其直方图分布被量化为M个等级且用h(li)来描述。由式 (12)可以得到某一量级灰度直方图分布。

m
其中:f为归一化系数,使∑p(u)=1;N为区域总像素
lu=1数;a=为区域大小;l为中心区域坐标;N为红外目标以l为中心的像素数;li为目标区域中的某个点;g(·)为一个加权函数,定义为:

2.3遮挡判定与自适应融合策略
粒子的滤波算法具有严重的粒子退化和贫化现象,增大粒子数虽可提高跟踪精度但计算量明显增加。本文根据两种模型框架的优弱势,设计结合粒子的滤波算法模型,首先对目标状态粗略分析,再结合Mean shift算法模型,在进一步缩小的区域内执行再查询,从而确定目标精确位置的跟踪策略。Mean shift算法还可以结合增加核函数带宽来解决复杂环境下目标遮挡追踪问题。
假设模板为q={qu}u=1,2,…,m,候选区域为p={p(u)}u=1,2,…,m,两者的远近用Bhattacharyya相似系数ρ(p,q)度量,远近越近时,两者更具有相似性。目标区域和候选区域是否相近我们可以通过式(14)中ρ(p,q)的值来进行分析。

公式(15)是计算观测模型的经验公式,σ为高斯分布的方差值,本文取σ=0.2。

通常ρ(p,q)作为判断目标是否被遮挡的准则,当其小于预先设定的阈值ρT即ρ(p,q)≤ρT时,说明目标具有遮挡的可能性,之后对Mean shift的带宽进行增加,此时对ρ(p,q)进行计算,直到ρ(p,q)>ρT的情况下给出最终的结果,否则继续增加Mean shift的带宽。结合粒子的滤波算法模型与均值漂移模型抗遮挡红外目标追踪模型的流程如图1所示。
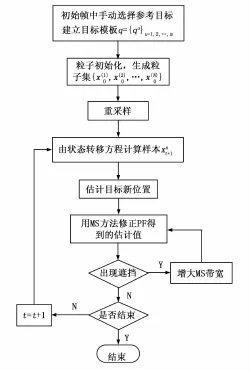
图1 本文算法流程图
3 仿真结果分析
本实验在具有英特尔I5处理器,内存4 GB的笔记本进行,数据分析采用MATLAB 7进行。红外摄像机镜头焦距为25 mm,拍摄距离大于80 m,环境照度为0.05~0,1 Lux。在试验刚开始时人为给出初始点,如果锁定目标了,对目标采用白色框进行标示。
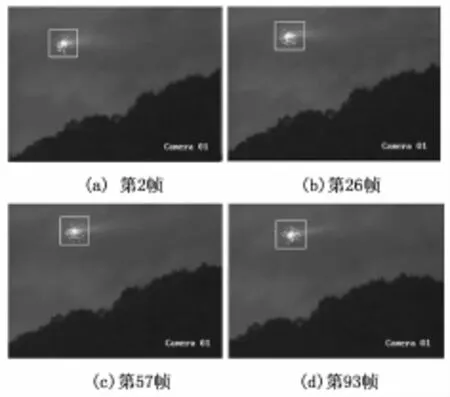
图2 第一组测试序列效果分析图
试验中我们在红外的情况下对飞行模型进行跟踪,每帧图像像素为290×210,红外目标灰度分布等级为8,N=100。第一组实验在无遮挡条件下,对红外飞机目标的进行追踪,共测试100帧,在粒子滤波算法对飞机状态进行粗略估计之后,用均值漂移算法进行进一步精确搜索。从图2中可看出,本文设计的算法可以精确稳定的进行红外目标跟踪。
第二组实验,在遮挡情况下进行红外飞机目标的追踪,试验测试共50帧。图3(c)第25帧时,飞机明显被遮挡,本文算法融合Mean shift的抗遮挡特性,在有遮挡的情况下,再结合Mean shift算法模型,在进一步缩小的区域内执行再查询,试验中在32帧后精确的追踪上目标。结合试验结果,对比其他的设计本文的设计具较强的鲁棒性,还减少了算法计算量,提高了红外目标跟踪的实性。
4 结束语
基于统计类框架下的粒子滤波与基于优化类框架下的均值漂移,各自都难以表现出良好的跟踪性能,本设计根据两类跟踪框架的优点,设计了一种在粒子的滤波模型下增加均值漂移模型的跟踪算法。同时,针对红外系统探测距离远,目标成像小而导致的目标特征不明显、目标背景复杂、遮挡等问题,提取红外图像的灰度信息,根据巴氏系数自适应更新模板,使红外目标在遇到遮挡时仍能鲁棒地跟踪。若想要更好得实现复杂环境下红外目标的追踪鲁棒性,可融合多个红外信息特征对目标进行追踪。

图3 第二组测试序列效果分析图
[1]姜锦锋.红外图像的目标检测、识别与跟踪技术研究[D].西北工业大学,2007.
[2]姬雪峰.基于粒子滤波的红外目标跟踪方法研究[D].西安:西安电子科技大学,2011.
[3]Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Trans on Pattern Analysis and Machine Intelligence,2003,25 (5):564-575.
[4]Doucet A,Gordon N,Krishnamurthy V.Particle Filters for State Estimation of Jump Markov Linear Systems[J].IEEE Trans.Signal Processing,2001,49 (3):613-624.
[5]管小清,吕志强.适用于复杂环境下的实时目标跟踪技术[J].计算机测量与控制,2012,20(10):2776-2778.
2016年1期文章《基于车载电子标签数据的单交叉口状态判别研究》,增加第四作者,作者信息为:
姓名:刘续博
所属单位:美国密歇根大学工业与运营工程学院
College of Engineering University of Michigan
Infrared Target Tracking Based on Particle Filter and Mean Shift
Zhu Hongxiang,Dong Qing,Zhang Zhenhua
(Chinese Flight Test Establishment,Xi'an710089,China)
According to problems of cluttered environment or the low contrast between infrared target imaging and background,we extract the gray characteristics of target and use the particle filter algorithm which recursively forecast and update the sample sets of the state space to approximate the posterior density probability.In order to further increase the accuracy of tracking,we fuse the Mean Shift algorithm to search for target in local area.The bandwidth of kernel function in Mean Shift algorithm can also deal with the target occlusion problem effectively.Experimental results indicate the proposed method can not only improve the efficiency of the algorithm and overcome the particle degeneracy phenomenon,but also has good performance in occlusion.
particle filter;mean shift;infrared target tracking;anti-occlusion
1671-4598(2016)05-0207-02
10.16526/j.cnki.11-4762/tp.2016.05.058
TP391
A
2016-03-09;
2016-03-31。
朱洪翔(1989-),男,江苏镇江人,硕士研究生,主要从事机载测试技术方向的研究。
