针对非自衡对象的蝎子控制算法研究
2016-11-22许向阳刘业彬杨忠琳
许向阳 刘业彬 杨忠琳 何 杰
(1.北京理工大学自动化学院,北京 100081;2.内蒙古泰兴泰丰化工有限公司,内蒙古 阿拉善 750336)
针对非自衡对象的蝎子控制算法研究
许向阳1刘业彬1杨忠琳1何 杰2
(1.北京理工大学自动化学院,北京 100081;2.内蒙古泰兴泰丰化工有限公司,内蒙古 阿拉善 750336)
针对低增益非自衡被控对象,具有简单控制结构的蝎子控制算法体现了良好的控制效果。应用Popov判据对工程蝎子算法的稳定性进行分析,给出了系统渐近稳定的充分条件。并且根据稳定裕度的概念提出新的控制器经验整定公式,参数选取更加形象直观,具有工程意义。仿真结果和应用实践都表明了该控制算法良好的动态特性和参数整定公式的有效性。
蝎子算法 Popov判据 非自衡 参数整定
非自衡对象存在于许多实际过程控制系统中,它是不稳定过程的一种特殊情况,特别当受控对象具有低增益特性,且实际系统控制器输出受限时,积分饱和现象的出现会使控制效果变差。大型化工反应器的温度控制、大型容器的液位控制以及各种飞行器的位置控制等,都是此类对象的典型代表。国内外相关学者和工程技术人员针对此类控制系统进行了广泛的研究,并提出了一系列的控制算法,例如内模控制[1]、鲁棒控制[2]及PID控制[3,4]等,均取得了良好的控制效果,但由于算法本身的复杂性,缺乏简单有效的参数整定方法,实际工程应用价值受到很大限制。
针对这一问题,文献[5,6]在工程经验的基础上提出一种名为蝎子算法的控制算法,该算法以系统输出误差e为划分准则,只需整定3个参数便可完成控制器的设计,简单实用,具有很好的工程应用价值。但文献中仅采用描述函数方法进行了系统的稳定性证明,是一种近似的证明方法,另外,参数整定公式形式较为复杂,工程实际意义不够明确,不便于工程技术人员的理解和调试。笔者以此为基础,对蝎子算法做了进一步研究。首先应用Popov判据对蝎子算法进行了稳定性证明,给出了系统渐近稳定的充分条件和控制器参数的有效取值范围;其次,基于稳定裕度的概念提出新的控制器参数整定公式,参数选取形象直观、意义明确,为该类非线性控制算法的实际工程应用提供了有效实用的方法。
1 算法描述①
蝎子算法是一种基于事件划分的非线性控制算法,以系统输出误差e为事件划分准则,充分考虑了饱和输入条件下低增益非自衡对象的特性。该算法分为3个部分[6]:
a. 当系统绝对误差特别大时,控制器的输出值达到实际系统的控制量输出的上界U+(或下界U-);
b. 针对不同参数的被控对象,系统存在光滑的非线性比例控制律u=Kp·e(t),当系统误差较大时,控制增益较大,保证系统的快速响应能力,当系统误差减少时,控制增益随之减小,保证系统不存在超调量;
c. 实际控制系统中常常存在干扰,仅仅使用非线性比例控制律u=Kp·e(t)并不能消除系统的稳态误差,因此在系统误差接近于零的情况下,选择加入积分控制器。
图1为蝎子算法控制律的具体表现形式,为了使它拥有工程适用性,文献[5,6]还进一步提出了工程蝎子算法,如图2所示。考虑到蝎子算法积分作用域非常小,笔者暂且忽略积分作用的存在,在图2的基础上,进一步得到如图3所示的非线性控制律。图1~3中,横坐标为误差,纵坐标为控制律。

图1 蝎子算法

图2 工程蝎子算法

图3 蝎子算法非线性控制律特性曲线
2 稳定性分析
在图4所示的系统模型中,G(s)为线性部分传递函数,N(x)为时不变非线性环节。非线性环节(图5)满足以下条件:

(1)
其中K为任意值,Popov判据为此类闭环系统的稳定性分析提供了一种有效的方法。

图4 带有非线性环节的系统模型
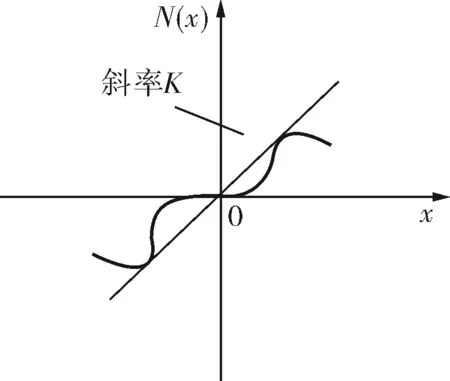
图5 非线性环节的静态特性曲线
引理1(Popov稳定判据)[7]如果非线性系统(图4)线性部分传递函数G(s)的极点中有一个为零,其余极点均位于S左开平面内;非线性特性N(x)满足式(1),则该系统大范围渐近稳定的充分条件为对于所有ω≥0的值和任意小的实数δ>0,总会存在某个实数q,使得以下Popov不等式成立:

(2)
即:
(3)
其中,ReG(jω)和ImG(jω)分别代表G(jω)的实部和虚部。
引入新的等效频率特性:ReG*(jω)=ReG(jω),ImG*(jω)=ω·ImG(jω)。进一步可将Popov判据表示为:
(4)
据此,G*(jω)在平面上的Popov线是通过点(-1/K,0),斜率为1/q的直线,如图6所示,G*(jω)频率特性曲线在ω≥0范围内完全处于Popov直线右侧,画出G*(jω)的Nyquist图就可以计算出保证系统稳定的K的最大值[8]。

图6 Popov稳定判据图形表示
考虑如下被控对象模型:

(5)
其中,K为静态增益,T1、T2为过程时间常数。实际生产过程中,大型化工反应器的温度控制、各种飞行器的位置控制等,均可看作此被控模型。G(s)与蝎子算法非线性控制律(图3)满足Popov稳定判据前提条件。

证明G(s)频率特性为:

(6)
由引理1,其等效频率特性表示为:
(7)


图7 G*(jω)频率特性曲线
引理2[9]f(x)有二阶连续导数,若在(a,b)上u=f(x)的图形是光滑的凸弧,则在(a,b)上f″(x)≤0;若在(a,b)上u=f(x)的图形是光滑的凹弧,则在(a,b)上f″(x)≥0。
引理3[9]若切线的切点位于光滑曲线的凸弧上,则在切点附近的曲线位于切线下侧。反之亦然。
G*(jω)频率特性曲线的一阶、二阶导数如下:

(8)

(9)

3 工程蝎子算法参数整定

图8 工程蝎子算法
由图8可知,工程蝎子算法的输出控制律表述为:
(10)

笔者根据稳定裕度的概念,提出新的控制器整定方案,参数选取可依据如下经验公式作为调整依据:
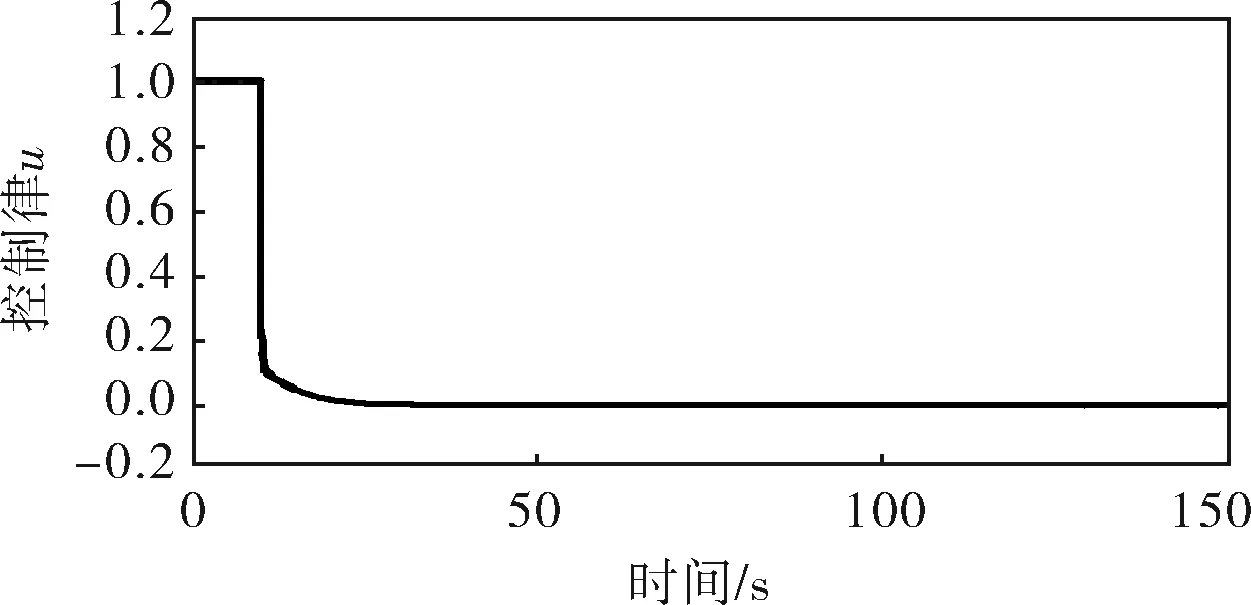
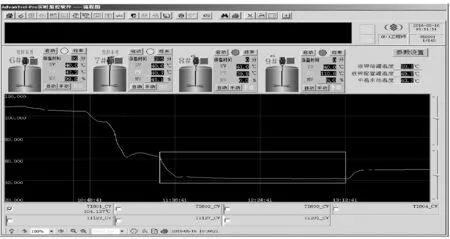
b.K1的选取。当误差较小时,控制律u=K1·e(t),为保证系统有较小的超调量,K1的选取应满足K1 c.K2的选取。当误差较大时,控制律u=K2·e(t)±Δ,为保证系统具有快速响应能力,K2的选取应满足K2>Ku,具体取值可参考K2=(5~15)Ku。 该经验公式提供了参数选取的大致范围,可见Ku的取值与K、T1+T2成反比,现场工程师可根据实际情况灵活地进行参数调整,以期达到满足工艺要求的控制品质。 图9所示为系统闭环控制反馈框图,其中C(s)为蝎子算法控制器,sat为系统的饱和输入特性,G(s)为低增益非自衡被控模型。 图9 系统闭环控制反馈框图 取被控对象为: 图10 控制效果曲线 图11 蝎子算法作用下控制律u输出曲线 图12 PID作用下控制律u输出曲线 图13 零均值方差为的随机噪声 由图10可知,PID与蝎子算法均可达到满意的控制效果;但图11、12的对比说明,随机噪声的引入使得PID控制量输出产生较大波动,这对于执行器的动作是非常不利的。蝎子算法保证快速响应能力的同时具有平滑的控制量输出,具有良好的控制效果,参数经验公式的得出为工程适用奠定了基础。 蝎子算法的提出基于工程经验,并已成功应用到实际工程中。苯胺基乙腈水解反应生成苯胺基乙酸钾的15 000L反应釜的反应过程温度控制,为一典型的饱和输入条件下低增益非自衡控制对象,图14为该被控对象基于蝎子算法的实际控制效果。 图14 苯胺基乙腈水解反应生成苯胺基乙酸钾的 15 000L反应釜的反应过程温度控制曲线 如图14中白框区域所示,反应釜温度在蝎子算法控制律作用下可快速达到并保持在期望值40℃,满足实际生产工艺要求。该实际控制效果与仿真分析具有良好的一致性。 利用Popov判据对工程蝎子算法稳定性进行分析,给出了系统渐近稳定的充分条件和控制器参数的有效取值范围;其次,根据稳定裕度的概念提出新的控制器经验整定公式,参数选取形象直观,具有工程意义。仿真结果和应用实践验证了该算法良好的控制效果与经验公式的有效性,为工程适用奠定了良好的基础。 [1] 靳其东,权玲,王学伟.改进的内模控制方法对一阶非自衡对象的控制研究[J].化工自动化及仪表,2010,37(7):10~12. [2] 王建国,曹广益,史君海.一类非自衡化工过程的最优控制[J].化工自动化及仪表,2006,33(6):23~26. [3] 张卫东,孙优贤,许晓鸣.一类非自衡对象的PID控制[J].自动化学报,1999,25(4):518~523. [4] 高肇凌,郭雪,张少雷,等.基于模糊PID控制的煤层气智能排采系统应用[J].石油化工自动化,2016,52(1):46~49. [5] Li T,Xu X Y, Dai Y P.Analytical Design of the Scorpion Algorithm for FOLIPD Processes with Low Gain[C].2015 Chinese Automation Congress.Wuhan:CAC,2015:314~319. [6] 李腾.四旋翼无人机机动控制算法的研究与设计[D].北京:北京理工大学,2016. [7] 庞国仲.自动控制原理[M].合肥:中国科学技术大学出版社,1993. [8] 张建灵,安锦文.基于波波夫稳定判据的自适应模糊控制[J].火力与指挥控制,2007,32(11):60~63. [9] 陈玥.关于曲线与其切线的位置关系问题的探讨[J].中国科教创新导刊,2009,(17):73. [10] Eriksson L, Oksanen T, Mikkola K.PID Controller Tuning Rules for Integrating Processes with Varying Time-delays[J].Journal of the Franklin Institute,2009,346(5):470~487. ResearchoftheScorpionAlgorithmforanIntegratorProcess XU Xiang-yang1, LIU Ye-bin1, YANG Zhong-lin1, HE Jie2 (1.SchoolofAutomation,BeijingInstituteofTechnology,Beijing100081,China; 2.TaixingTaifengChemicalCo.,Ltd.,AlxaLeague750336,China) The scorpion algorithm with simple control structure has a good effect on the controlled object boasting of low gain and integrator process. Applying the Popov stability criterion to analyzing the scorpion algorithm’s stability and to present the sufficient condition for the asymptotic stability of the system was implemented, including the concept of stability margin based to propose the controller empirical tuning formula so that the parameter selection can become vivid and straightforward. Both simulation results and application examples indicate the effectiveness of the formula and the better characteristics of this algorithm. scorpion algorithm, Popov criterion, integrator process, parameters setting TH865 A 1000-3932(2016)12-1281-05 2016-11-04(修改稿)4 仿真分析






5 应用实践
6 结束语