重型装备空投视景仿真系统的设计与实现
2016-11-21文震宇余红英
文震宇,余红英,杨 臻
(1.中北大学 计算机与控制工程学院,山西 太原 030051; 2.中北大学 机电工程学院,山西 太原 030051)
重型装备空投视景仿真系统的设计与实现
文震宇1,余红英1,杨 臻2
(1.中北大学 计算机与控制工程学院,山西 太原 030051; 2.中北大学 机电工程学院,山西 太原 030051)
针对军用运输机空投任务,基于重装空投过程的动力学分析,运用分离法将飞机与重装作为两个独立的实体、降落伞与重装视为一个整体,构建了在无控条件下机-物与伞-物两部分的动力学模型,结合视景仿真技术,使用Unity 3D为开发引擎研制了一套包含飞机飞行动力学模型、重装出舱动力学模型、降落伞空投动力学模型及其关键数据实时显示、记录与打印的可视化虚拟环境,以计算数据驱动三维模型完成整个空投过程的关键动作,弥补了数值仿真系统不直观的缺点,增加了视景仿真系统的近真实性。结果表明:该视景仿真系统可以近似真实地还原空投过程、准确完成空投动作,为重型装备空投的分析与评估提供了参考。
计算机应用;视景仿真系统;重装空投;动力学模型;数据驱动
重型装备作为空降伞兵作战的重要支持,因在空投过程中产生的“减载效应”威胁到运输机的安全性能,使其在空投领域一直是一个研究的热点与难点。目前国内对重型装备空投的研究主要集中在空投方案与控制器的设计上,没有进行过空投系统试验,可靠性受到质疑。进行空投系统的试验需要多部门参与和协调,消耗大量的人力物力,往往受气象条件制约耗时很长,而且试验次数很有限,难以考察系统各因素的影响[1]。依据重装空投各模块的动力学模型构建一套视景仿真系统,通过修改起始参数对不同情况下的空投过程进行模拟并且动态多角度的查看其对各运动模块的影响,这对于重装空投的研究具有重要意义。
笔者详细阐述了某重型装备空投视景仿真系统的设计过程。
1 动力学计算模型的建立
1.1 运载飞机动力学模型的建立
对飞机飞行性能与规律建模并对其进行抽象
提取得出飞机及其飞行过程的表达形式。首先建立三大坐标系,分别为地面坐标系Oexeyeze、机体坐标系Oxpypzp与速度坐标系Oxvyvzv[2]。如图1所示。
本文建立的坐标系并不符合传统的右手定则,为的是匹配Unity 3D开发环境中的世界坐标系。为了方便对飞机在飞行过程中的受力情况进行分析,需要得到地面坐标系、机体坐标系与速度坐标系之间的转换关系。以机体坐标系为基础坐标系,则从地面坐标系到机体坐标系的转换Tep为:
(1)
式中:θ为飞机俯仰角;ψ为飞机偏航角;φ为飞机滚转角。
同样,速度坐标系到机体坐标系的转换矩阵Tvp为
(2)
式中:α为飞机迎角;β为飞机侧滑角。
将整架飞机看作一个刚体,机身坐标系与速度坐标系的原点均位于飞机质心,在货物出舱过程中,若只考虑其纵向情况可得到其质心运动方程:
(3)
式中:v为飞机质心相对于地面坐标系的速度;m1为空机质量;T为发动机推力;f1、f2、f3分别为在机体坐标系下的三轴上货物对飞机的作用力;D、Y分别为xp、yp轴上的空气阻力;g为重力加速度;k为飞机在zp轴上的角速度。
同样可以得到飞机的姿态动力学方程
(4)
式中:Mw为气流对飞机的力矩在yp轴上的分量;r1、r2为货物在机体轴xp、yp上的矢量位置;Iz为飞机绕zp轴的转动惯量。
1.2 重型装备动力学模型的建立
利用飞机无侧滑的条件,结合对货物的受力分析可以得到重装在机舱内滑动时的运动方程[3]:
(5)
式中:rwx为重装距空机质心的距离;Fqx为牵引伞在xp轴上的作用力;L为zp轴上的空气阻力;m2为重装质量。
1.3 伞物系统动力学模型的建立
降落伞与重型装备共同构成了空投过程中的伞物系统,同样需要建立地面坐标系Oxdydzd,伞物坐标系Oxsyszs和航迹坐标系Oxhyhzh。如图2所示。若以航迹坐标系为基础坐标系,则从地面坐标系到航迹坐标系的转换公式为
(6)
式中:θs为航迹倾斜角;ψs为航迹偏转角。
由在旋转坐标系中矢量的导数公式[4]可以得到伞物系统在航迹坐标系下质心的动力学方程为
(7)
式中:vs为伞物系统的运动速度;Ds、Ls、Zs分别为在航迹坐标系下的三轴上空气对伞的作用力;ms为伞物系统的总质量。
2 视景仿真系统体系结构设计
2.1 系统功能及结构概述
重型装备空投视景仿真系统依据相关的动力学方程对重型装备空投过程进行演示,并对重要数据进行显示、记录。
根据运输机、重装与伞物系统的运动学与力学模型,结合视景仿真技术搭建出一套视景仿真系统。该仿真系统既要对各部分数值进行解算, 又要在建立的虚拟场景中对各模块的运动过程进行可视化仿真,相应得到的计算与仿真数据一方面需要用到视景仿真模块中对模型进行驱动[5];另一方面需要用到数据管理模块中进行记录,是集人机交互界面、数值仿真解算、三维动画实时演示以及数据结果分析为一体的可视化系统。系统结构框图如图3所示。

2.2 系统工作流程
根据上述系统结构,可以得到系统的工作流程,如图4所示。
2.3 系统参数设置
参数输入模块为用户提供参数设置接口,通过参数输入接口改变空投环境与降落伞等空投主体参数,对不同类型的空投方案进行仿真,并且为之后的姿态动作解算与三维模型驱动提供参数依据。
该系统需要设置的起始参数包括空投环境参数、运输机飞行参数、重型装备参数和降落伞参数。其中空投环境参数包括天气状况、侧风风速、侧风风向夹角、空气阻力系数和空气密度;运输机飞行参数包括运输机空机质量、飞行海拔高度、飞行速度、与地面横轴夹角和运输机发动机推力;重型装备参数包括重装质量、重装尺寸、重装舱内位置、重装与地板摩擦系数、牵引点距中心面距离;降落伞参数包括伞系统总质量、伞系统总长度、各单伞质量、牵引伞弦长与弦角和开锁牵引力。
3 系统功能实现
3.1 空投动作姿态解算
根据上述内容所建立的动力学模型描述了飞机及其伞物系统的受力情况和运动特性,解算出准确的数据,以至于使模拟空投的过程更接近真实情况。通过四阶龙格库塔法对建立模型过程中的一阶微分方程与二阶微分方程进行求解,得到各模型在不同时刻的位置和姿态数据[6]。由于解算过程所需计算量较大,其解算过程在单独线程中完成。为了与Unity3D软件中的增量时间相对应,循环迭代的步长选为0.02s。在完成最终次迭代后,将各个时刻的状态量作为动作姿态数据驱动三维模型按解算结果进行运动。
3.2 降落伞开伞过程制作
降落伞开伞过程的制作在Unity中是一个难点。在制作降落伞的过程中,伞绳采用LineRenderer线渲染器进行渲染。本系统采用Mega-Fiers插件来制作开伞动画。为各级降落伞添加PointCache脚本组件,并在其脚本中添加各单伞开伞过程的点缓存动画从而提供降落伞开伞过程的基础动作。同时添加MegaFFD4×4×4组件,将降落伞基础模型进行切分,通过调整组件中的Points值实现对不同区域的开伞驱动。为了模拟真实空投过程中强大的气流对降落伞开伞过程的影响,通过在控制脚本中修改MegaWaving脚本的Wave值与Phase值来实现在开伞过程中各伞从强烈抖动到平稳张开的过程。
3.3 三维模型数据驱动
机-物、伞-物系统的运动需要数据支持, 该数据来自仿真控制脚本和仿真驱动脚本。在Unity中建立Vehicle类,此类包含每个空投主体的质量、速度、位置与姿态信息,由其派生出的Driven类封装了物体受力信息与受力权重,具体施加矢量力的大小与方向及其实现方法通过在继承Driven类的各种Driven_xxx类中实现。
3.4 仿真结果记录
系统将每个时刻的仿真数据记录到Excel表格中,用户可在空投过程完毕后对该次仿真中各个时刻的输出数据进行查看与打印。此过程需要借助从Java移植到.NET下的NPOI插件。将NPOI.DLL文件拷贝到UnityAssetsPlugins下,在处理数据的脚本中添加相关的命名空间,新建HSSFWorkbook后每隔FixedDeltaTime时间记录一次结果,便可编写脚本将相关数据信息存储到Excel中。
若用户想对数据结果进行打印,既可以进入到该视景仿真软件根目录,找到之前写入的Excel表格,也可以选择仿真系统所提供给用户的打印功能直接打印。通过新建系统进程System.Diagnostics.Process,使该进程采用操作系统自识别模式,之后指定需要打印文件的存储路径即可实现此功能。
4 系统测试结果分析
为了对该视景仿真系统进行测试,将仿真结果与某次空投试验进行对比,依据各模块所建立的运动学与动力学模型,取仿真步长为Unity中的FixedDeltaTime固定增量时间0.02s,仿真初始数据全部来自空投试验,空投高度为2 800m,空机质量为138t,飞行速度为320km/h,重型装备选择质量为15t的某型集装箱,设置空投仿真初始状态为飞机俯仰角θ=0°、迎角α=0°,重装距舱尾1.8m。降落伞系统空投水平初始速度选为105m/s,阻力特征比为1.2,牵引伞牵引比为0.4,伞物系统俯仰角η=0°、迎角α=0°。仿真结果核心数据在系统仿真界面的重型装备空投过程数据显示面板中实时显示。
4.1 系统对空投过程的还原度测试
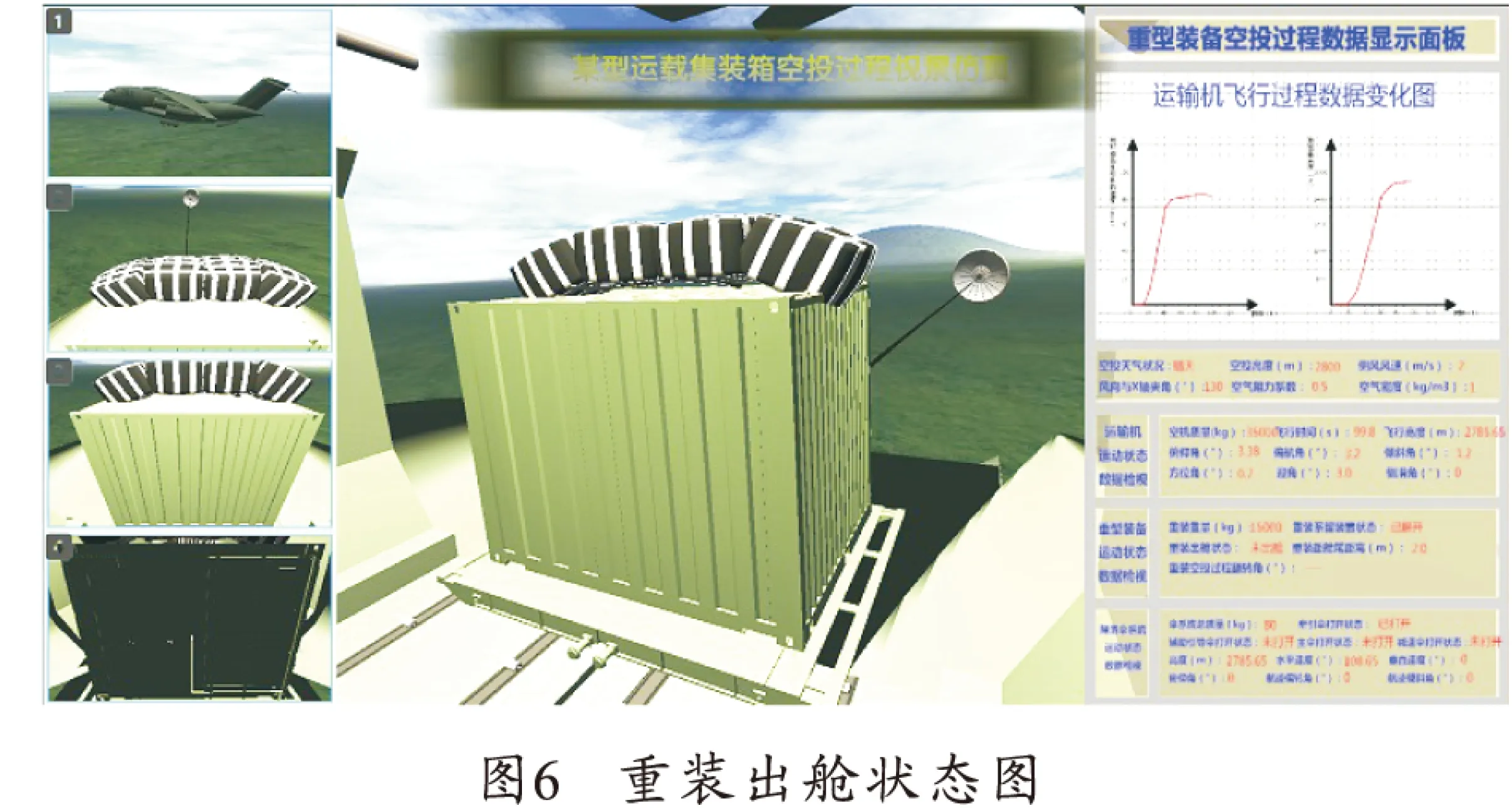
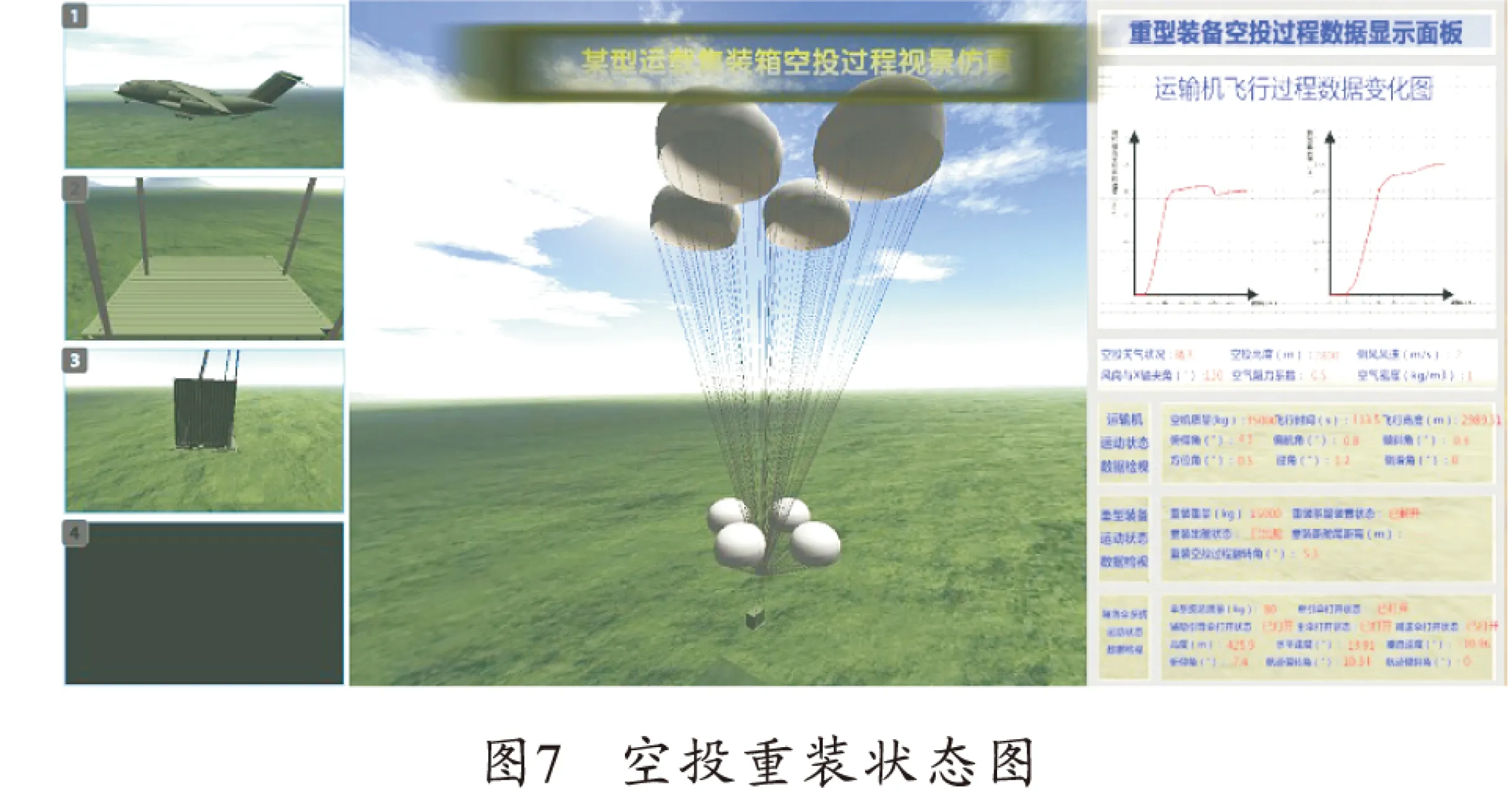
视景模块中模型的真实性、对空投环节的准确切换以及最终呈现的画面效果直接决定了该系统对空投过程的还原程度。重装空投的完整过程主要由3个阶段组成:运输机运载重装平稳飞行阶段,此时货物未出舱,牵引伞包未打开,如图5所示;重装出舱阶段,此时牵引伞包抛出,牵引伞打开牵引重装出舱,如图6所示;降落伞空投重装阶段,此时主伞与减速伞打开,降落伞对重装进行空投,仿真系统主摄像机焦点对象变为伞物系统,标号为3的小窗口实现对重装翻转角度的查看,如图7所示。
4.2 系统的准确性测试
在空投过程中运输机的俯仰姿态,降落伞系统的开伞时间与伞物系统在空中的运动轨迹都是考察空投过程是否安全的重要指标。将其与空投试验作对比,测试该仿真系统的准确性。
1)运输机迎角。在牵引比为0.4、牵引点位于重装货台底部的情况下,飞机迎角的响应结果如图8所示。
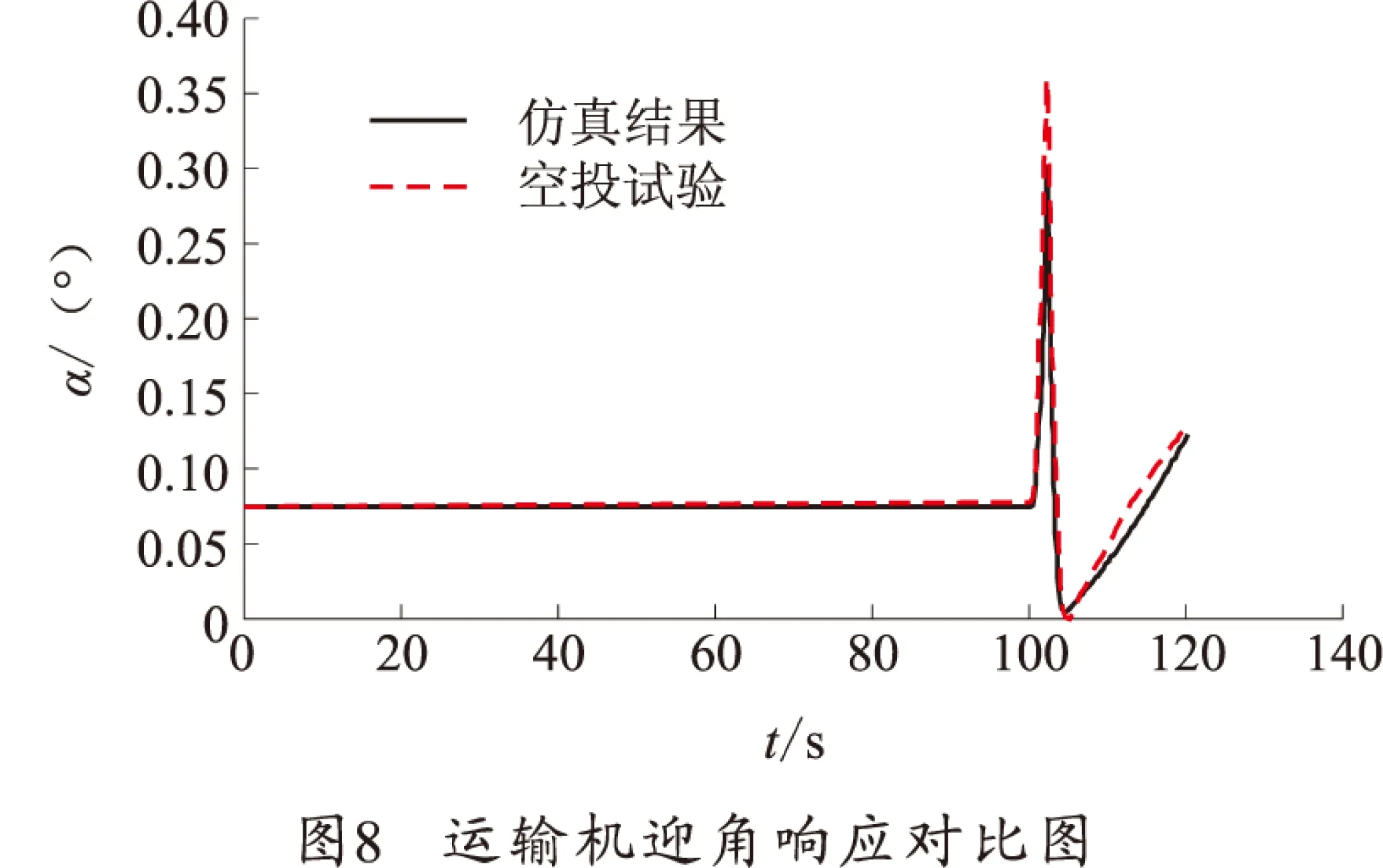
该视景仿真系统得到的运输机仿真结果与空投试验基本一致,误差主要由在建模过程中忽略掉运输机纵向变化引起的,适用于理想状态下的空投仿真。
2)运输机俯仰角。由式(3)可知,不同质量的重型装备在出舱过程中会对飞机产生作用力,使得飞机的俯仰角与迎角发生变化,在仿真系统中对不同质量的重装进行空投仿真,可以直观地看到运输机不同的姿态变化,分别选择15t与10t的重型装备进行仿真,与空投试验数据作对比,如图9所示。

3)伞系统状态。各级降落伞拉直与充气时间如表1所示。
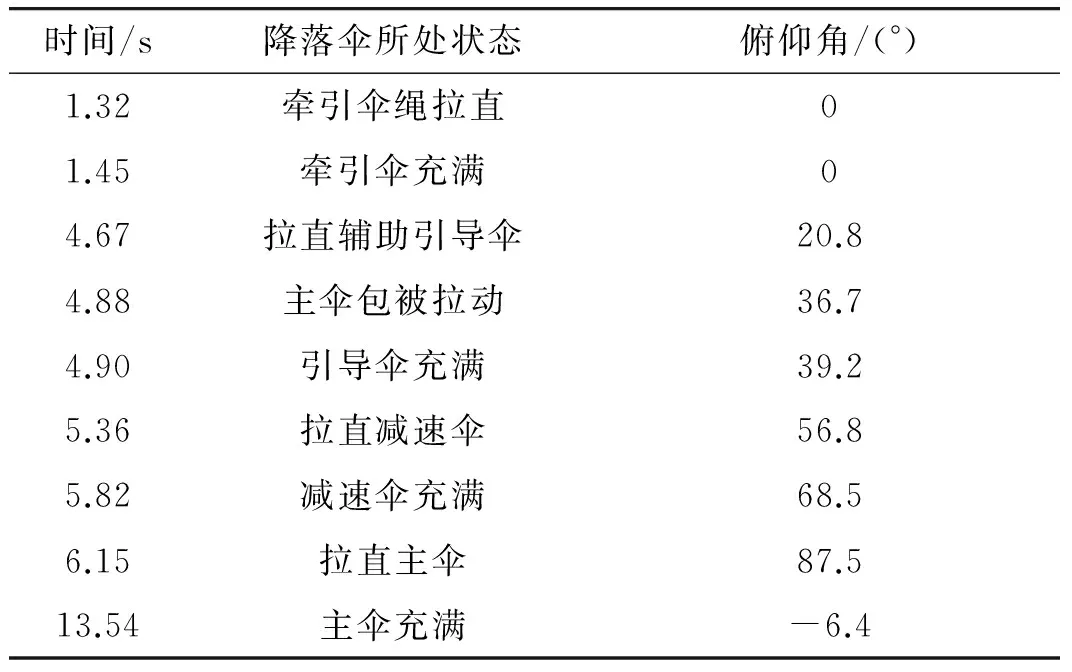
表1 空投过程中各级降落伞时间状态表
4)伞物系统运动轨迹。重装出舱后,伞物系统运动轨迹与空投试验运动轨迹对比如图10所示。

5 结束语
笔者以重型装备空投流程为现实依据,结合Unity 3D开发引擎研制了一套重型装备空投视景仿真系统,探索了视景仿真技术在空投领域中的应用。根据重型装备视景仿真系统的总体结构框架,通过C#编程,使该视景仿真系统可以完成动作姿态解算及其关键数据实时显示、记录与打印的功能。提出了一种使用Mega-Fiers插件与LineRenderer线渲染器相结合制作降落伞的新方法,弥补了Unity中针对柔性布料仿真的缺陷,近似真实地再现了降落伞的开伞过程。通过与空投试验数据作对比,验证了该视景仿真系统的准确性,为检测理想状态下的空投方案是否可行提供参考。将来可在此基础上增加侧风等外部环境的多重考虑,对该重型装备空投视景仿真系统进行完善。
References)
[1]柯鹏,杨春信.货台空投系统的三维动画仿真[J]. 系统仿真学报,2006,18(5):1253-1256.
KE Peng, YANG Chunxin.Heavy cargo airdrop simulation with 3D animation[J].Journal of System Simulation,2006,18(5):1253-1256.(in Chinese)
[2]徐军,欧阳绍修.运输类飞机自动飞行控制系统[M].北京:国防工业出版社,2013.
XU Jun,OUYANG Shaoxiu.Automatic flight control system for transport aircraft[M].Beijing:National Defence Industry Press,2013. (in Chinese)
[3]桂冰颖.重装空投动力学建模与控制技术研究[D].南京:南京航空航天大学, 2012.
GUI Bingying.Dynamic modeling and control technology research on the transport during heavy cargo airdrop[D].Nanjing:Nanjing University of Aeronautics and Astronautics, 2012. (in Chinese)
[4]王利荣.降落伞理论与应用[M].北京:宇航出版社,1997.
WANG Lirong. Parachute theory and application[M]. Beijing: Space Press, 1997. (in Chinese)
[5]彭海军,王德石,陈觉之.鱼雷弹道可视化仿真研究[J]. 武汉理工大学学报,2009,31(6):100-104.
PENG Haijun,WANG Deshi,CHEN Juezhi.Research on torpedo trajectory visual simulation[J].Journal of Wuhan University of Technology,2009,31(6):100-104. (in Chinese)
[6]王景志,陈红林. 基于龙格-库塔算法对降落伞空投的研究[J]. 现代电子技术,2010,33(14):124-126,130.
WANG Jingzhi,CHEN Honglin.Research for parachute airdrop based on Runge-Kutta algorithm[J].Modern Electronic Technique,2010,33(14):124-126,130. (in Chinese)
The Design and Implementation of Visual Simulation System of Heavy Equipment Airdrop Computer Engineering and Applications
WEN Zhenyu1, YU Hongying1, YANG Zhen2
(1.College of Computer and Control Engineering, North University of China, Taiyuan 030051, Shanxi, China;2.College of Mechanical and Electrical Engineering, North University of China, Taiyuan 030051, Shanxi, China)
Based on military transport planes airdrop task, the analysis of dynamics on heavy equipment airdrop process, with the plane and the heavy load regarded as two separate entities, while the parachute and the heavy load as a whole by using separation method, this thesis constructed a dynamic model of the two parts of the plane and the material, the material and the umbrella under non-control condition. Combined with visual simulation technology, with Unity 3D as the development engine, a set of dynamic models of aircraft flight dynamics, extravehicular movement dynamics, parachute airdrop dynamics are developed with the visual virtual environment of key data real-time displayed, recorded and printed. Then the calculated data to drive the 3D model and the key action of the airdrop process makes up for the weakness in numerical simulation system and increases the near authenticity of the visual simulation system. The results show that the apparent scene simulation system of the drop action and movement trajectory is basically consistent with real situations with the drop action results being accurate, providing a reference for the analysis and evaluation of heavy equipment airdrop.
computer application; visual simulation systems; heavy equipment airdrop; dynamic models; data driven
10.19323/j.issn.1673-6524.2016.03.015
2015-11-26
航空科学基金(20132910001)
文震宇(1992—),男,硕士研究生,主要从事视景仿真领域研究。E-mail:wenzhenyu5@qq.com
TP391.9
A
1673-6524(2016)03-0070-06
