基于SAS算法的起飞一发失效应急路径规划方法
2016-11-20焦卫东程颖柯然
焦卫东, 程颖, 柯然
1.中国民航大学 天津市智能信号与图像处理重点实验室, 天津 300300 2.中国农业银行 科技部, 上海 200000
基于SAS算法的起飞一发失效应急路径规划方法
焦卫东1,*, 程颖1, 柯然2
1.中国民航大学 天津市智能信号与图像处理重点实验室, 天津 300300 2.中国农业银行 科技部, 上海 200000
为解决起飞一发失效应急程序(EOSID)手动设计的不足,提出一种基于SRTM数据的稀疏A*搜索(SAS)算法的EOSID路径规划方法。首先采用航天飞机雷达地形测绘使命(SRTM)的网格地形数据,结合起飞一发失效相关规章,考虑爬升梯度与保护区限制确定可行搜索空间;然后基于可行搜索空间运用稀疏A*搜索算法搜索应急离场路径,在传统A*算法寻找扩展节点时加入起飞性能约束条件,同时利用地形高程数据进行地形和威胁回避,生成一条三维应急离场航迹;最后利用三次样条曲线对规划的应急离场航迹进行平滑处理。实验结果表明该方法能自动搜索出有效的EOSID三维航迹。
EOSID; 航迹规划; 稀疏A*算法; 起飞性能; 三次样条曲线
随着航空运输业不断发展,自然条件复杂机场增加,起飞性能的安全性和经济性矛盾日渐突出。为保障起飞安全基础上的经济性,民航局规定航空承运人必须制定相应机型的起飞一发失效应急(Engine out Standard Instrument Departure, EOSID)程序。
目前EOSID由性能工程师和程序设计人员手动设计完成,设计工作量大,技术难度高,需要在全动模拟机上反复迭代,结果并非最优。近几年国外对EOSID的航迹规划研究初步展开,将无人机(Unmanned Aerial Vehicle,UAV)航迹规划的先进技术运用到EOSID航迹自动规划中。2010年9月第十届AIAA ATIO(Aviation Technology,Integration,and Operations)会议上,Talgorn等[1]设计了一个自动优化EOSID水平航迹的软件。软件通过混合遗传算法对一发失效的航迹进行全局优化,利用最小梯度对地形进行优化处理,最终得到由一系列导航指令集组成的EOSID路径,该路径以离散的航迹指令序列作为有效航迹,仅提供有效几个操作类别及导航设备数量,并未得到连续航迹。2011年8月AIAA导航与技术会议上,Masson等[2]提出采用基于A*算法的UAV航迹规划技术规划起飞一发失效路径[3-4],但未考虑实际飞机航向限制。以上航迹规划算法均基于二维平面搜索,无法有效进行地形和威胁回避。中国现阶段主要侧重于EOSID设计制作及性能分析[5-7],设计主要基于手动完成,对EOSID航迹规划的相关研究较少。
本文采用稀疏A*(Sparse A* Search,SAS)算法,将一发失效的规章限制与地形数据相结合构造三维搜索空间,在传统A*算法寻找扩展节点基础上考虑航向角、爬升/下滑角等约束条件,同时将地形威胁引入代价函数,使规划航迹满足实际飞行性能和越障要求;对规划航迹进行平滑处理并在MATLAB及三维地理信息系统中对规划路径进行验证,实现在真实地形环境中自动生成可行的EOSID三维连续航迹。
1 EOSID制作规范
起飞标准仪表离场(Standard Instrument Departure,SID)程序是按照飞机全发工作而设计的飞机起飞水平航迹,选取的障碍物范围(保护区)较大。起飞重量按飞机起飞一发失效情况计算,若考虑同样大保护区和爬升梯度,则允许的起飞重量太小,严重影响经济效益。EOSID是有别于SID的飞行航迹路线,考虑的障碍物范围较SID小得多,制作该程序可增大飞机的最大起飞重量,从而增大飞机商载能力,提高营运效益。
根据飞机起飞一发失效应急程序制作规范,飞机起飞限制和规定包括最小爬升梯度能力、最小超障高度及起飞保护区规定[8-10]。
1)最小爬升梯度
净飞行航迹定义为总飞行航迹减去一个安全余量后的垂直飞行航迹,减去的安全余量为:0.8%(双发)、1.0%(四发)。净飞行航迹必须满足最小爬升梯度限制,如表1所示。
2)超障余度
飞机起飞净飞行航迹须以35英尺的余度(对于转弯坡度大于15°的为50英尺)越过保护区内所有障碍物,如图1所示。
3)起飞保护区
CCAR121.189规定起飞航迹径区的半宽,为提供一个较大安全余量,离场时保护区半宽为:从跑道末端90 m开始,以12.5%的扩张率扩张至900 m宽,然后保持标称航迹两侧900 m等距直至起飞航迹的结束点,如图2所示。图2中:TOD为起飞距离,TORA为可用起飞滑跑距离,TODA为可用起飞距离,cwy为净空道,E为保护区宽度,E0为保护区起始宽度,D为起飞跑道末端DEK至离场航迹的水平距离。

表1 起飞段最小爬升梯度限制Table 1 Minimum climb gradients at takeoff segment

图1 超障余度Fig.1 Obstacle clearance redundancy
最大起飞重量须满足起飞保护区内最小爬升梯度、超障余度要求。综上对于起飞的规章限制,设计EOSID应考虑:避开关键地形障碍物、安全越障、满足规定爬升梯度和安全余量(保护区)等。

图2 离场保护区Fig.2 Departure splay
2 基于SAS的EOSID路径规划算法
理论上,对于规划空间内每一个位置,航迹可从任意方向经过,采用传统A*算法进行航迹搜索在扩展节点时,需要考虑邻域中所有网格单元,且生成的航迹无法满足飞机起飞性能约束条件[11-12]。
SAS算法与A*算法路径规划的算法思想皆为从起始点开始扩展直到目标点从而得到一条路径。算法扩展过程的节点可分为3类:①已被扩展的节点;②已经产生但未扩展的节点;③尚未产生的节点。其中,第1类节点可称之为封闭节点,算法进行搜索时将该类节点存放在CLOSED表内;第2类节点是已产生,同时等待扩展的节点,因而称之为开放节点,搜索时存于OPEN表内。与传统A*算法不同,在扩展节点时SAS算法并不遍历当前节点邻域内每个网格单元,只考虑其中若干扇面,有效地剪除搜索空间并缩短收敛时间[13-14]。
2.1 SAS算法航迹规划过程
采用SAS算法进行EOSID路径规划,数据源为航天飞机雷达地形测绘使命(Shuttle Radar Topography Mission, SRTM)提供的地形高程数据,算法实现过程如图3所示。
首先根据一发失效梯度限制对地形数据进行处理,构造三维搜索空间,同时将一发失效的规章限制与搜索空间相结合,使规划航迹满足一发失效垂直越障要求;其次在A*算法寻找当前点的扩展节点时考虑航向和爬升/下滑等约束条件,并在计算各扩展节点代价函数时引入地形威胁,评价各节点代价,找出代价最小的节点直至到达目标点;然后对规划航迹数据进行平滑处理得到可行的三维路径;最后与官方离场程序进行可视化对比验证。由于离场路径要考虑导航台,将规划航迹分割成从跑道末端到导航台、从导航台到终点的多段航迹,每段航迹都采用上述方法进行航迹规划。
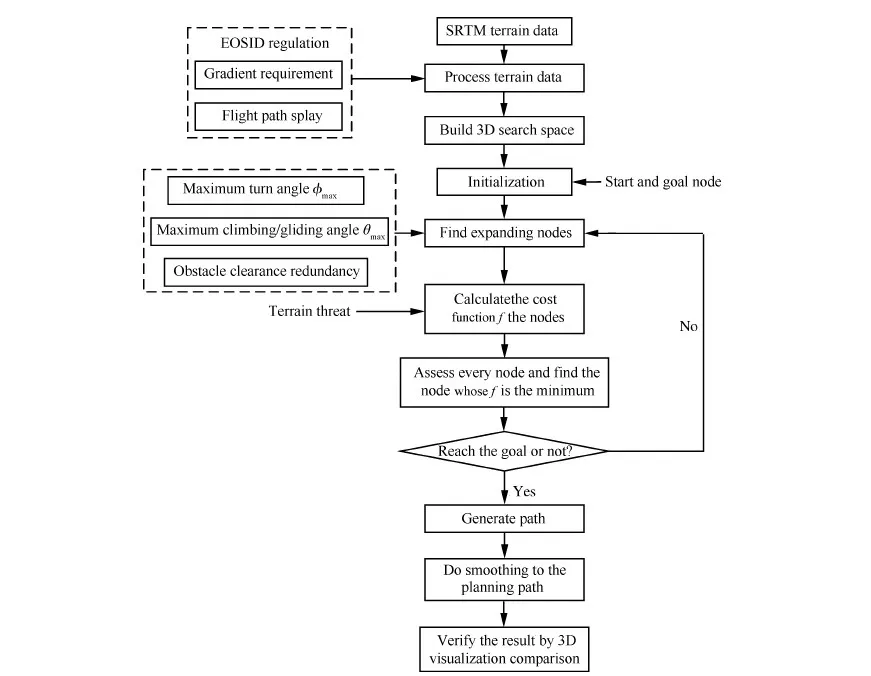
图3 基于稀疏A*(SAS)算法的EOSID航迹规划过程Fig.3 EOSID path planning process based on sparse A* search(SAS) algorithm
2.2 规划空间的处理
根据第1节EOSID规章,对规划空间的约束可考虑制作规范中的两个因素:一发失效最小爬升梯度能力、起飞航迹保护区。起飞一发失效离场路径应满足最小爬升梯度2.4%,因此可将搜索空间确定为梯度为2.4%的“圆锥梯度面”,如图4所示,对于离场区域的地形高程,若穿过圆锥面则被认为不可通过,反之规划为可用搜索空间。
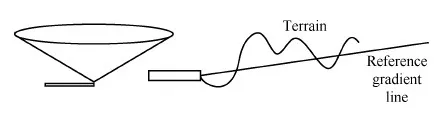
图4 锥面搜索空间Fig.4 Search space cone
同时,对于地形复杂机场,须考虑EOSID航迹保护区。为确保规划航迹的横向安全间隔,选择对地形数据进行腐蚀算法处理,将与障碍物相邻的区域进行裁剪处理,缩小搜索空间,保证规划航迹与离场障碍物的安全间隔,得到裁剪后的搜索空间。
然后,对SRTM地形高程数据在二维网格单元基础上,按不同高度等级划分第三维度,构造三维搜索空间,并根据圆锥梯度面和裁剪后搜索空间确定每一个三维网格单元的可行性。
2.3 航迹约束条件
受飞行器性能限制,采用稀疏A*算法进行路径规划时要考虑角度约束、航迹段长度约束等[15-17];同时,按照EOSID制作规范要求,需要考虑超障余度要求。因此,在航迹规划过程中,考虑的约束条件主要有:最大拐弯角φmax、最大爬升/下滑角θmax、最大/小航迹段长度Lmax/lmin及超障余度要求。其中拐弯角φ及爬升角θ不能超过最大限制,即
(1)
航迹段长度li应满足的条件为
(2)
其中:飞行器在改变飞行姿态前必须保持直飞的最短距离lmin由飞行器机动能力和导航要求决定,在SAS搜索过程中扩展步长表示最小航迹段长度;Lmax由飞行器携带燃料及允许飞行时间确定,在SAS算法中表现为所有航迹段长度之和小于或等于一个预先设定的最大距离。
2.4 航迹点代价函数
SAS算法航迹点代价函数为
f(x)=g(x)+h(x)
(3)
式中:g(x)为起始点到当前节点x的真实代价;启发代价h(x)为当前节点到目标点代价的估计值,以当前点到目标点的距离来表示。在SAS进行航迹搜索时,将规划空间网格化,通过代价函数式(3)评估各扩展节点代价值,选择代价最小点加以扩展,直至找到目标点,生成规划航迹。g(x)由式(4)给出[18]
(4)
式中:n为总航迹段数;w1、w2分别为航迹长度和威胁指数对g(x)的影响权重;li为第i段航迹的长度,通过约束航迹总长度,减少飞机飞行时间;fi,threat为第i段航迹的威胁指数,限制飞机尽量避免威胁区域飞行,具体计算方法为
(5)
式中:m为已知威胁个数,fi,j为第j个威胁对第i段航迹的威胁指数,其中航迹的任意位置点y受到第j个威胁影响的威胁指数计算方法为[19]
fi,j(y)=
(6)
式中:Kj为第j个威胁的强度;Rj(y)为飞机与第j个威胁的距离。
威胁确定为规划离场路径时应考虑的关键地形障碍。计算fi,j时,沿第i段航迹进行积分。为减少计算量,取第i段航迹中点的威胁指数作为该段航迹所有点的平均威胁指数。
2.5 航迹节点扩展方式
SAS算法扩展节点时,结合2.3节的约束条件,考虑飞机的物理性能,对飞行航迹的每一步航向限制为φmax;同时,考虑飞机起飞的机动性能限制,对航迹在垂直平面内上升和下滑的最大角度限制为θmax;给定单步扩展步长lmin。基于此,SAS算法在扩展当前节点x时,并不遍历邻域内每一个网格单元,只考虑其中若干个扇面,扩展节点确定的扇面搜索空间如图5所示。

图5 当前节点的可行搜索空间Fig.5 The feasible searching space of current node
P(i)为规划节点当前位置,首先由起始点和目标点的方位关系确定扇面方向,在航向角限制内均匀选取M个扇面,由爬升和下滑角确定每个扇面的边界,将每个扇面分成N个扇区,可表示爬升、平飞、下滑的三维搜索方向,这样扩展节点共得到M×N个扇区,SAS搜索扩展节点共得到M×N个子节点。传统A*算法考虑当前节点每一个可能到达的邻域网格单元,共26个节点。当M=N=3,SAS只需计算9个子节点,有效修剪搜索空间的无用节点,从而减少内存需求,缩短收敛时间。
得到M×N个扩展节点后,计算每个子节点的真实代价g(x)和启发代价h(x),将生成的子节点存于OPEN表内。每次扩展节点时,从OPEN表中找出代价最小节点,以此作为当前节点进行扩展。将当前节点存于CLOSED表内,同时将生成的子节点存于OPEN表内,一直持续这一过程直至找到目标,规划航迹通过回溯路径获得。
2.6 SAS算法搜索步骤
SAS进行三维航迹规划步骤如下。
步骤1将起始节点插入OPEN表中,并将其作为当前节点,将CLOSED表置空。
步骤2在OPEN表中移出代价最小元素,把它作为当前节点,同时将其存进CLOSED表内。
步骤3如果目标节点加入CLOSED表中,航迹搜索过程结束。从目标节点开始回溯直至到达起始节点,得到一条从起始节点到目标节点代价最小的路径。
步骤4扩展当前节点
1) 对当前节点待扩展区进行构造。将进入当前节点的航线在水平面上的投影方向作为对称轴,此时待扩展区水平剖面是最大拐弯角φmax的2倍。
2) 分割待扩展区。待扩展区的垂直剖面关于水平方向对称,大小为最大爬升/下滑角θmax的2倍。
3) 对扩展节点中的每一个子节点,根据式(3)计算每一个子节点代价f(x),找出代价最小的节点。
步骤5对于步骤4计算得到的每个最小代价节点,与OPEN表中每个节点g值对比判断是否可得到更小的g,如果能就更新该节点的g,h值,如果该节点在CLOSED表中或者是障碍物(不可达)则忽略。
步骤6返回步骤 2。
步骤7输出规划结果。
2.7 航迹数据的平滑处理
由2.6节得到一系列三维网格点,根据DEM数据和经纬高的一一对应关系,可获得规划路径的三维航迹数据。由于规划空间基于SRTM网格数据,当前航迹点的下一航向仅限于有限个方向,规划路径在某些航迹点出现较大航向变化,因此采用3次B样条曲线拟合的方法对航迹进行平滑处理,得到一条平滑后的离场路径。关于三次B样条曲线拟合的详细表述参考文献[19-20]。
2.8 规划航迹的合理性
由2.7节得到平滑处理后的三维航迹,即为最终规划EOSID路径,将其与官方公布的离场程序在三维地理信息系统软件中进行三维可视化显示,在三维图中对比两者,确保规划路径与离场路径一样避开关键地形障碍满足水平越障要求;同时以精确数据进行垂直越障验证,在MATLAB中提取规划航迹保护区内地形高,与规划航迹高对比,验证规划航迹满足在相应保护区内的最低超障要求,以此验证航迹合理性。
3 仿真结果与分析
林芝机场被公认为国内民航净空环境、气象条件及飞行程序制定最为复杂的机场,离场程序是RNP(Required Navigation Performance)程序,该程序考虑了一发失效情况下的安全性与性能。以林芝机场23号跑道离场程序为例,采用SAS算法进行仿真,仿真数据源为SRTM提供的90×90数字地形高程图;离场航迹规划起始点位置为RWY23末端,经纬高坐标(94.335 0, 29.303 6, 2 948.9),终点为离场程序上距DME导航台MIL 5 NM处,高度不低于5 500 m,最大拐弯角φmax和最大爬升/下滑角θmax分别为45° 和30°;最小步长lmin=90;扇面个数M=3,每个扇面扇区个数N=3,离场航迹超障余度为35 ft,根据已知数据利用第2节算法规划从机场跑道末端到离场程序指定点的路径。
图6显示了航迹规划结果。其中:图6(a)是以林芝机场为中心90×90的DEM数据地形;图6(b)是以机场为中心11 NM地形图,即参考离场航迹规划的空域范围;图6(c)为考虑EOSID规章处理后的规划空间,由图可知搜索空间在EOSID爬升梯度和保护区限制下缩小,为下一步的航迹搜索确定了可行搜索空间;图6(d)为规划出的林芝机场EOSID的二维路径,包括从跑道末端到导航台及从导航台到终点两段航迹;图6(e)为规划的三维路径。由图6可知规划路径有效避开了关键地形障碍物,三维路径结果也说明算法有效地规划出符合起飞离场剖面的三维路径。

图6 林芝机场航迹规划结果Fig.6 Path planning result of Nyingchi Airport
图7为林芝机场的规划EOSID离场路径与平滑处理后航迹,其中图7(a)为平面图,图7(b)为三维空间图。由图7可知规划航迹在水平剖面和垂直剖面出现直线上升或者下降现象,这是由于网格搜索空间所致,可通过曲线拟合处理解决该问题,平滑后的航迹符合飞机爬升的机动性能。
图8为规划路径与林芝机场离场程序(该程序考虑了一发失效的性能要求)的三维可视化对比图,下方细亮绿色航线表示林芝机场RNP离场程序,上方粗暗红色航线表示规划路径。由图8 可知规划路径与官方离场程序基本一致。方法实现了从跑道末端到指定位置的一发失效应急离场路径规划,同时达到对关键地形的规避,实现了水平越障。

图7 规划路径与平滑航迹Fig.7 The planned path and its smoothing
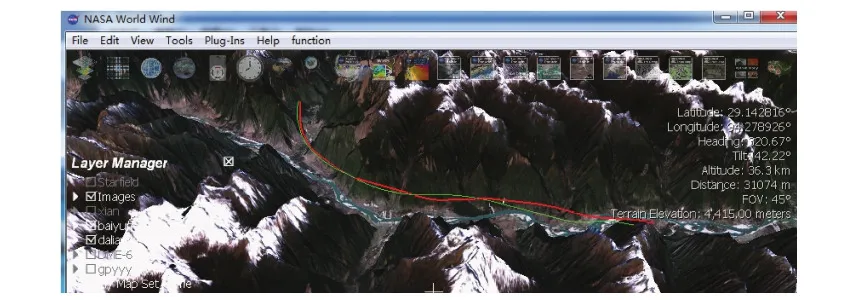
图8 林芝机场离场程序与规划路径三维可视化对比Fig.8 Visualization comparison between the planned path and takeoff procedure of Nyingchi Airport
图9为规划航迹垂直越障验证结果。由于飞机起飞段的主要任务是安全起飞,即从起飞至改平段应满足超障要求,因此规划路径应高于最小超障高,即高于保护区内最高障碍物35 ft,由图9可知规划路径在飞机起飞至改平段航迹满足超障基本要求。
此外通过MATLAB编程对SAS算法和A*算法规划路径进行对比。图10为两种算法规划航迹对比图。由图可知,A*算法虽实现路径规划,但规划的路径接近威胁,与A*相比,SAS算法更有效地规避了威胁。

图9 规划路径垂直超障结果Fig.9 Vertical obstacle clearance result of planned path
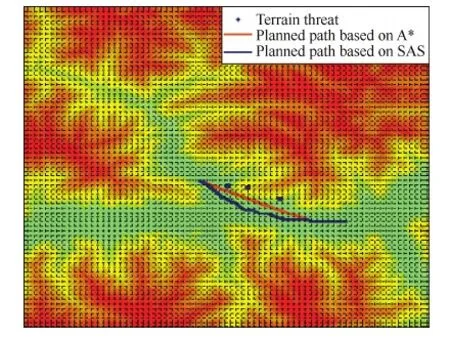
图10 SAS算法与A*算法规划航迹对比Fig.10 Planned path comparison of SAS and A* algorithm
4 结 论
1) 实现了从跑道末端到指定点的EOSID路径自动规划,满足EOSID的规章要求。
2) 在传统A*算法规划路径的基础上实现了三维航迹规划。
3) 考虑了约束条件及地形威胁,满足实际飞机性能和越障要求。
4) 与官方公布的离场程序对比验证了规划应急离场路径的合理性,与A*算法规划路径对比验证了该方法的优越性。
综上,本文方法为EOSID路径的自动规划提供了一个可行方案。
[1] TALGORN B, LAPORTE S, BES C, et al. One engine out trajectory optimization: AIAA-2010-9013[R]. Reston: AIAA, 2010.
[2] MASSON B, BAIN M, PAGE J. Engine-Out takeoff path optimization out of terrain challenging airports: AIAA-2011-6313[R]. Reston: AIAA, 2011.
[3] MALAEK S M, ABASSI A. Near-Optimal terrain collision avoidance trajectories using elevation maps[C]//IEEE Aerospace Conference.Piscataway, NJ: IEEE Press, 2006.
[4] BARRAQUAND J, LANGLOIS B, LATOMBE J C. Numerical potential field techniques for robot path planning[J]. IEEE Journals & Magazines, 1992, 22(2): 224-241.
[5] 王治国. 飞机起飞一发失效应急程序设计研究[D]. 大连: 大连理工大学, 2008: 1-22.
WANG Z G. A study on engine out standard instrument departures design[D]. Dalian: Dalian University of Technology, 2008: 1-22 (in Chinese).
[6] 骆昕. 起飞一发失效应急程序设计难点的研究分析[J]. 四川: 中国民航飞行学院学报, 2014, 25(1): 57-63.
LUO X. Research and analysis on key problems of engine out standard instrument departures design[J]. Beijing: Journal of Civil Aviation Flight University of China, 2014, 25(1): 57-63 (in Chinese).
[7] 杨新涅, 丁松滨, 赵磊, 等. 宁波栎社机场进离场程序的优化[J]. 中国民航大学学报, 2007, 25(3): 8-12.
YANG X S, DING S B, ZHAO L, et al. Optimization of departure and arrival procedures of Ningbo Lishe aerodrome[J]. Journal of Civil Aviation University of China, 2007, 25(3): 8-12 (in Chinese).
[8] Australian Government Civil Aviation Safety Authority. Civil aviation order 20.7.1B[S]. Canberra: Civil Aviation Safety Authority, 2005.
[9] Australian Government Civil Aviation Safety Authority. Civil guidelines for the consideration and design of engine out SID (EOSID) and engine out missed approach procedures[S]. Canberra:Civil Aviation Safety Authority, 2006.
[10] ICAO. Annex 6, International standards and recommended practices[S]. Montreal: ICAO, 1990.
[11] NILSSON N. Problem-solving methods in artificial intelligence[M]. New York: McGraw-Hill, 1971.
[12] 郑昌文, 严平, 丁明跃, 等. 飞行器航迹规划[M]. 北京: 国防工业出版社, 2008: 3-49.
ZHENG C W, YAN P, DING M Y, et al. Route planning for air vehicles[M]. Beijing: National Defense Industry Press, 2008: 3-49 (in Chinese).
[13] SZCZERBA R J, GALKOWSKI P, GLICKTEIN I S, et al.Robust algorithm for real-time route planning[J]. Aerospace and Electronic Systems, 2000, 36(3): 869-878.
[14] 刘希, 朱凡, 蔡满意, 等. 一种改进的快速航路规划方法[J]. 飞行力学, 2011, 29(1): 89-92.
LIU X, ZHU F, CAI M Y, et al. Improved method for fast path planning[J]. Flight Dynamics, 2011, 29(1): 89-92 (in Chinese).
[15] 王奎民. 基于SAS算法的三维多UAV协同航迹规划方法[J]. 电子科技, 2013, 26(11): 14-16.
WANG K M. Three-dimensional multi-UAV cooperative path planning based on improved SAS algorithm[J]. Electronic Science & Technology 2013, 26(11): 14-16 (in Chinese).
[16] 马培军, 毛云云, 张洪涛, 等. 基于3DSAS的多约束航迹协同规划与搜索方法[J]. 系统工程与电子技术, 2011, 33(7): 1527-1533.
MA P J, MAO Y Y, ZHANG H T, et al. Cooperative planning for multiple trajectories with multiple constraints based on 3DSAS[J]. Systems Engineering and Electronics, 2011, 33(7): 1527-1533 (in Chinese).
[17] 孟中杰, 黄攀峰, 闫杰. 基于改进稀疏A*算法的高超声速飞行器航迹规划技术[J]. 西北工业大学学报, 2010, 28(2): 182-186.
MENG Z J, HUANG P F, YAN J. Exploring trajectory planning for hypersonic vehicle using improved sparse A* algorithm[J]. Journal of Northwestern Polytechnical University, 2010, 28(2): 182-186 (in Chinese).
[18] 黄文刚, 张怡, 姜文毅, 等. 变步长稀疏A*算法的无人机航路规划[J]. 计算机工程与应用, 2012, 48(29): 206-209.
HUANG W G, ZHANG Y, JIANG W Y, et al. SAS algorithm with changeable steps for route planning of UAVs[J]. Computer Engineering and Applications, 2012, 48(29): 206-209 (in Chinese).
[19] 王金敏, 崔奇, 初楠. 运用三次样条曲线拟合机器人运动路径[J]. 机械设计, 2005, 22(7): 44-46.
WANG J M, CUI Q, CHU N. Fitting robot motion path based on cubic spline curve[J]. Journal of Machine Design, 2005, 22(7): 44-46 (in Chinese).
[20] 张玲. 基于三次样条曲线拟合公路平面线形方法研究[D]. 武汉: 武汉理工大学, 2007: 24-31.
ZHANG L. Analysis of fitting method on plan curve based on cubic spline[D]. Wuhan:Wuhan University of Technology, 2007: 24-31 (in Chinese).
焦卫东男, 博士, 副教授, 硕士生导师。主要研究方向: 虚拟现实技术在民航中的应用及图像/视频处理与编码。
Tel: 022-24092444
E-mail: nxjiaowd@sina.com
URL:www.cnki.net/kcms/detail/11.1929.V.20160413.1535.002.html
ApathplanningmethodforEOSIDbasedonSASalgorithm
JIAOWeidong1,*,CHENGYing1,KERan2
1.TianjinKeyLabforAdvancedSignalProcessing,CivilAviationUniversityofChina,Tianjin300300,China2.Sci-techDepartment,AgriculturalBankofChina,Shanghai200000,China
Toresolvetheproblemthatengineoutstandardinstrumentdeparture(EOSID)isonlydesignedmanuallybyengineers,asparseA*search(SAS)algorithmbasedonshuttleradartopographymission(SRTM)dataisproposedtooptimizethree-dimensionalenginefailuretakeoffpaths.Thepathplanningisdividedintotwostagesplanningspacedeterminationandpathsearch.Inplanningspace,SRTMgridterraindataisused,andrelevantregulationsofEOSIDareconsideredtodealwithsearchspace.Inpathsearch,SASalgorithmisusedtosearchthedeparturepath.ThetakeoffperformanceconstraintsareaddedintotraditionalA*algorithm.Meanwhile,terrainandthreatavoidanceisfinishedbyusingterrainelevationdatatoproduceathree-dimensionalinsteadofatwo-dimensionaltrajectory.TheplanneddeparturetrajectoryisthensmoothedbythecubicB-splinecurve,andobstacleclearanceverificationisbeingconducted.SimulationresultshowsthattheproposedalgorithmcanbeusedtooptimizeaviableEOSIDthree-dimensionaltrackingautomatically.
engineoutstandardinstrumentdeparture(EOSID);pathplanning;sparseA*search(SAS);takeoffperfor-mance;cubicB-splinecurve
2015-11-13;Revised2015-12-17;Accepted2016-02-22;Publishedonline2016-04-131535
s:CivilAviationJointFundsoftheNationalNaturalScienceFoundationofChinaandCivilAviationAdministrationofChina(U1533115);TianjinResearchProgramofApplicationFoundationandAdvancedTechnology(14JCYBJC16000);TheFundamentalResearchFundsfortheCentralUniversities(3122013C016,3122013Z001)
.Tel.:022-24092444E-mailnxjiaowd@sina.com
2015-11-13;退修日期2015-12-17;录用日期2016-02-22; < class="emphasis_bold">网络出版时间
时间:2016-04-131535
www.cnki.net/kcms/detail/11.1929.V.20160413.1535.002.html
国家自然科学基金委员会-中国民航局民航联合研究基金 (U1533115); 天津市应用基础与前沿技术研究计划 (14JCYBJC16000); 中央高校基本科研业务费专项资金 (3122013C016,3122013Z001)。
.Tel.:020-24092444E-mailnxjiaowd@sina.com
焦卫东, 程颖, 柯然. 基于SAS算法的起飞一发失效应急路径规划方法J.航空学报,2016,36(10):3140-3148.JIAOWD,CHENGY,KER.ApathplanningmethodforEOSIDbasedonSASalgorithmJ.ActaAeronauticaetAstronauticaSinica,2016,36(x):3140-3148.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
0.7527/S1000-6893.2016.0051
V328.3
A
1000-6893(2016)10-3140-09
