三相逆变器并联下垂控制策略的研究
2016-11-19邵明生揭贵生贺云南林克文侯畅武
邵明生 揭贵生 贺云南 林克文 侯畅武
【摘要】在逆变器并联系统中采用传统下垂控制实现功率均分时,由于下垂系数为常数,输出电压精度与功率均分效果间存在矛盾;同时,在突加突减负载时,输出电流易发生振荡。为此本文提出了一种引入母线电压反馈、变下垂系数及PI控制器的改进控制策略,既解决了下垂控制固有的输出电压调整率易超标的问题,又克服了传统控制中下垂系数对电压降的影响。构建了两台三相逆变器仿真模型,验证了该控制策略的有效性。
【关键词】三相逆变器无互连线并联母线电压改进下垂控制
0绪论
逆变电源广泛应用于国防科技、船舶和通讯等需要不间断供电领域,使得对其容量要求越来越高,提高系统容量的一种常用方式是多模块并联运行。
基于无互连线并联下垂控制是模拟同步发电机并网运行的自下垂特性,但逆变器与发电机存在区别。在低压配电网中,由于逆变器与母线距离差别较大,线路阻抗不可忽略,其较高的阻感比常导致传统下垂控制不稳定。解决该问题最直接的方法就是外接电感,但会导致系统体积增加,输出电压精度降低 [1-2]。文献[1]根据实际输出功率动态调节下垂系数,以有效减小输出电压的波动,但当负载变化剧烈时,仍会使输出电压和频率超标。文献[2]提出了虚拟阻抗概念,将逆变器输出电流通过虚拟阻抗反馈至电压参考值,从而灵活改变逆变器输出阻抗性质,但其大小难以确定,设置过小难以改控制效果,过大则会导致输出电压明显跌落。
为克服上述问题,本文提出一种通过变下垂系数、PI控制器及母线电压反馈共同构成的下垂控制。通过理论分析和仿真验证,改进下垂控制能够实现对并联系统的电能质量更加灵活、更加有效的控制。
1传统下垂控制策略
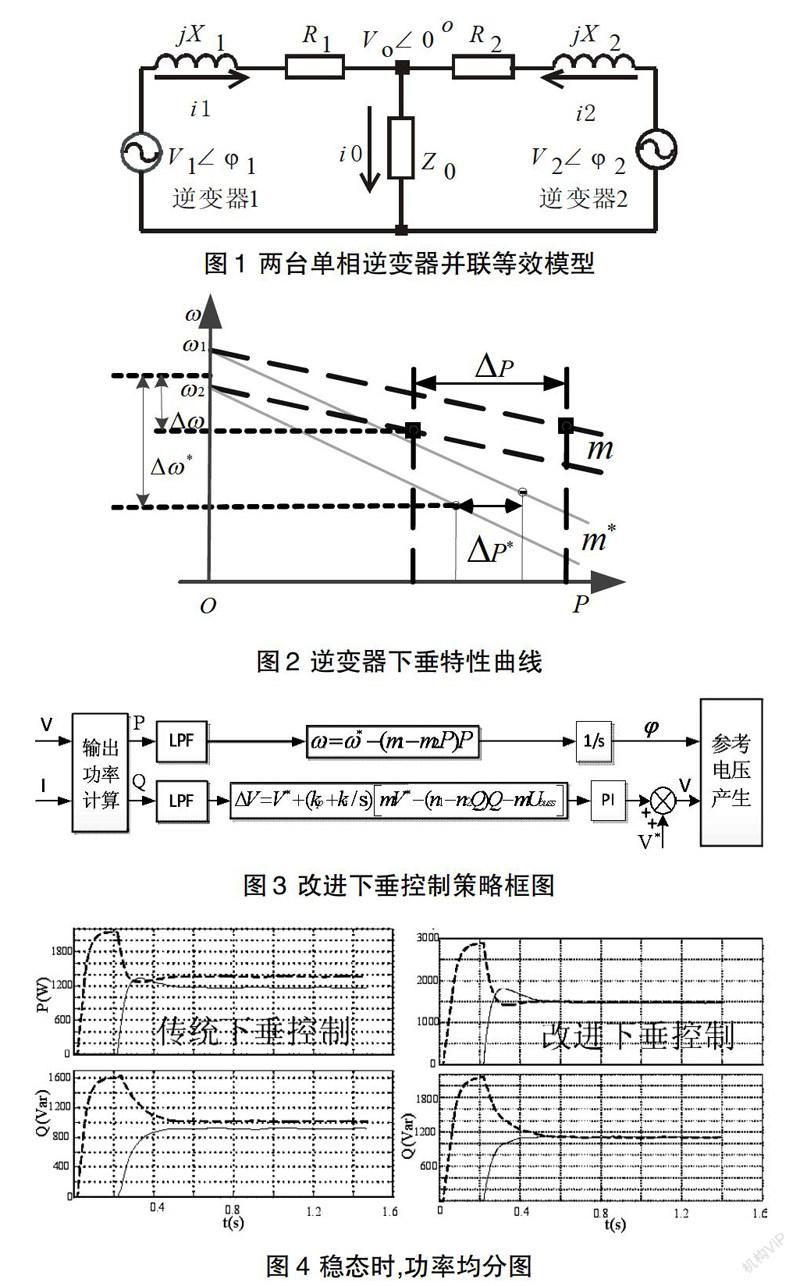
以两台单相逆变器并联运行为例,其简化电路如图1所示。当等效输出阻抗呈感性时[1],有:
由图2知:当m时,,,这表明功率下垂系数越大有功功率均分效果越好,但角频率偏差越大;同理,无功功率与输出电压幅值存在类似结论。因此,当逆变器并联运行时,其功率均分效果与输出电压质量必须折衷考虑。
2改进下垂控制策略
从控制器角度分析,由于输出角频率经过积分后,形成参考电压的电角度,而输出电压直接作为了参考电压;从环流抑制角度分析,无论是系统有功还是无功环流,其下垂参数应仅与环流有关,但控制器无法区分环流和负载功率,仅根据自身输出功率进行调节。为此,本文通过研究分析,在式(1)基础上引入PI控制器、母线电压反馈、变下垂系数:
(2)
其中:与为稳态额定角频率和额定电压;m1、m2为有功下垂系数;n1、n2为无功下垂系数;m为常数;为母线电压。
3 仿真验证
搭建了两台三相逆变器并联系统的模型,并联运行时带阻感负载。逆变器直流输入电压为400V,输出电压为150V,桥臂侧电感为5mH;交流滤波电容为69uF;负载侧电感为6.5mH;采样频率为3.6kHz;KPWM为逆变桥PWM等效增益,采用SVPWM技术,KPWM=Vdc/;KC=1/Ibase=1/39.6为电流采样变比;KV=1/Vbase=1/326为电压采样变比。
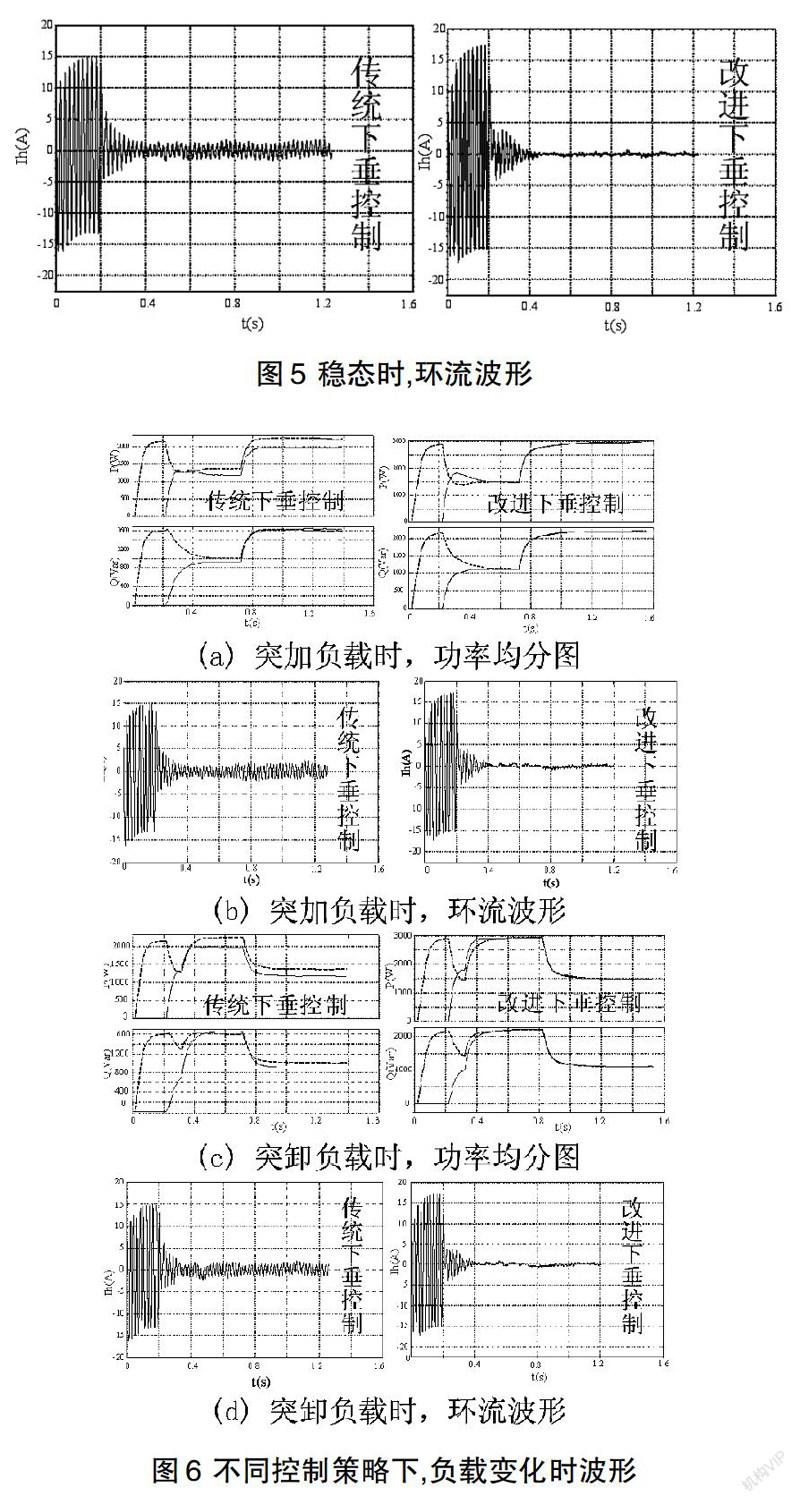
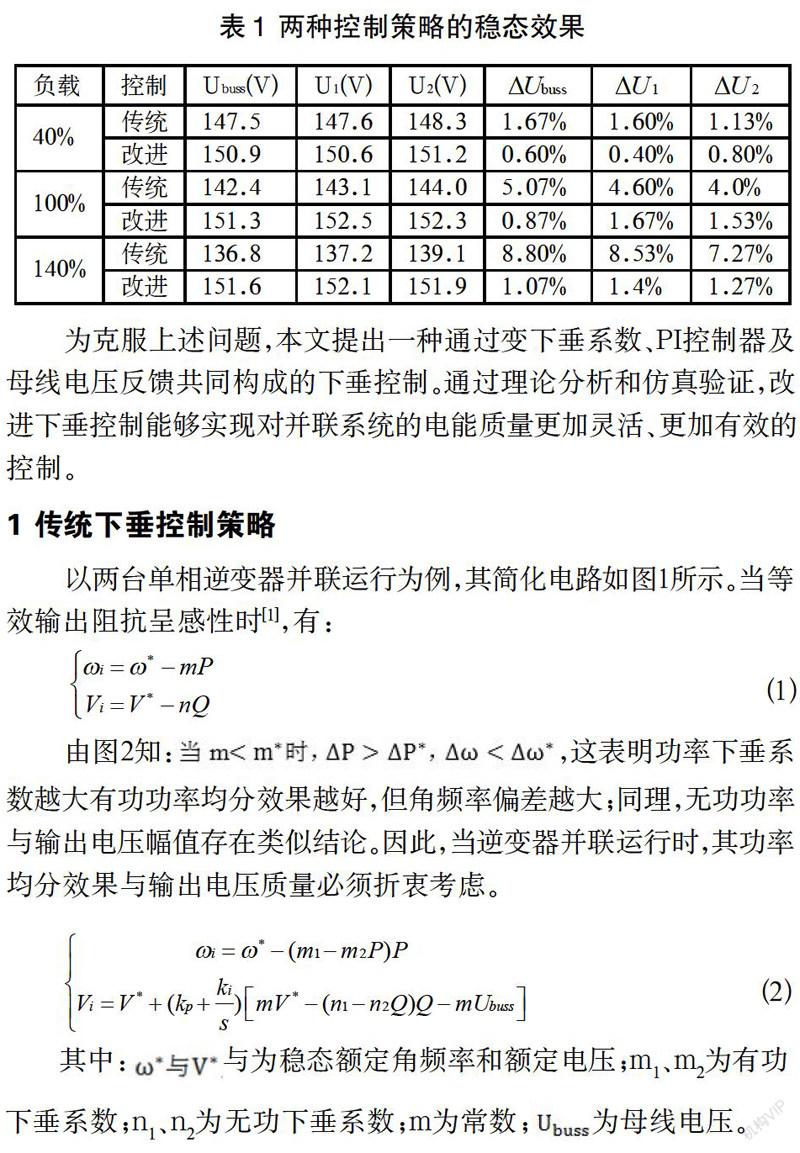
由图4、图5和表1得:采用改进控制策略,系统输出功率均分效果较好,环流也很小;由于变下垂系数、母线电压反馈的引入,使得母线电压在线路阻抗相差较大时也能满足调整率要求,避免了传统控制带来的较大电压偏差的现象。
两台逆变器并联时,首先让第1台带50%负载,在0.2s时让第2台投入并联,在0.7s时突加50%负载至100%负载;首先让第1台带50%负载,在0.2s时让第2台投入并联,在0.3s时带100%负载,然后在0.8s时再突缷50%负载。图6为两台逆变器并联负载变化时仿真波形,由图6可知:采用改进下垂控制策略,逆变器之间的功率均分效果更佳,造成的环流较小。
4 结语
本文针对逆变器并联系统提出了一种改进下垂控制策略。由于PI控制器、母线电压以及可变下垂系数的引入,有效的提高了并联系统的输出电压精度和稳定运行性能。理论分析和仿真结果证明该下垂控制策略具有较好的功率均分和环流抑制效果。
参考文献
[1]Yao W,Chen M. Development of Communicationless Hot-Swap Paralleling for Single-Phase UPS Inverters based on Adaptive Droop Method[C]. APEC,2009:1283-1287.
[2]J. M, Guerrero, José Matas, et al. A wirelss controller to enhance dynamic performance of parallel inverters in distributed generation systems[J].IEEETrans.on Power Electronics, 2004:1205-1213.
基金项目:国家自然科学基金资助项目(51177170)
作者简介:邵明生(1990-),男,硕士,研究方向为电力电子与电力传动。
