水下自航行器外形及水动力性能优化
2016-11-17薛侠峰严天宏
薛侠峰,严天宏
(中国计量学院,杭州 310018)
水下自航行器外形及水动力性能优化
薛侠峰,严天宏
(中国计量学院,杭州 310018)
研究水下自航行器(AUV) 外形及水动力性能优化的问题,为使得AUV具有较小航行阻力的同时拥有较大承载能力,需要不断进行AUV模型重建以及水动力结果分析,人工完成将会耗时很长,Isight多学科优化设计平台搭载常用的优化算法—NSGA-II遗传算法,整合Solidworks、Gambit、Fluent三大集成模块实现数据交换以进行AUV外形的建模、仿真并完成设计过程的自动化和智能的设计探索,确定最佳设计参数;仿真结果表明,最终优化后的AUV不仅减小了航行阻力并且拥有更大的承载能力;因此采用多学科优化软件Isight能够有效提高AUV外形及水动力性能优化的准确性和效率,提升其整体水动力性能。
水下自航行器;多学科优化;外形;水动力性能;优化
0 引言
传统水下机器人的设计是一种串行设计,经常凭借设计者的个人经验和才智,从已有的水下机器人类型中选取母型,确定其初步的主尺度和结构形式,在之后的完善过程中不断地人工修改优化,直到设计出一台满足任务要求的、主尺度和排水量达到最佳的水下机器人。这种传统设计方法需要在整个设计过程中进行大量的反复性修改,导致周期过长、耗资巨大的缺点[1-2]。
随着学科理论知识、计算机技术及现代优化方法的发展,水下机器人的设计呈现了综合运用建模软件、计算流体力学(computational fluid dynamics,CFD)软件、优化软件的新特点。随着多学科多目标优化方法(Multi-objective /Multidisciplinary Design Optimization,MDO)在众多领域的优异表现,水下自航行器工程设计领域也将会越来越重视这种有效的优化方法,期望采用多学科、多目标综合设计模式来提升水下自航行器的总体设计水平,进一步实现其水动力性能的提高[2-3]。
起源于GE的Isight是功能强大的计算机辅助优化(Computer Aided Optimization,CAO)平台,广泛应用于航空、航天、汽车、船舶、电子领域的零部件、子系统优化,以及复杂产品多学科设计优化。对于复杂的仿真流程,用户可以通过Isight集成和管理,并且通过多种优化算法可以探索得到优化方案,从而降低研发成本,缩短产品研制周期[4-6]。
本文采用Isight多学科优化设计平台搭载常用的优化算法—NSGA-II遗传算法[7-9],整合Solidworks、Gambit、Fluent进行AUV外形的建模、仿真并完成设计过程的自动化和智能的设计探索,确定最佳设计参数[10]。多学科目标优化方法比传统的水下机器人设计方法能够更有效提高AUV外形结构动力性能优化的准确性和效率[11]。
1 AUV外形及水动力性能优化原理论述
1.1 外形结构
AUV主体首端修正为偏心率e为3的半椭圆体,尾端为偏心率e为3.5的半椭圆体,中间部分为直径0.15 m的圆柱体。如图1所示。
Myring[12]流线型回转体首端曲线外形方程为:
(1)
式中,r(x)为首端各点处半径,x为轴向位置,d为最大横剖面直径,a为首端长度,n为头部形状指数。尾部曲线外形方程[13]为:
(2)
式中,r(x)为尾部各点处半径,x为轴向位置,d为最大横剖面直径,a为首端长度,b为中段长度,c为尾部长度,θ为最大尾包角,取40°。
水下自航行器外形初步设定为,全长1.48 m,首端长0.155 m,尾部长0.245 m。
图1 AUV外形结构
1.2 优化设计公式
目标变量的输出参数根据设置的权重和比例因子进行加权求和,在优化的过程中需要取其最小值,其规律为:目标设置趋势为最小化的将直接加权求和,目标设置趋势为最大化的将用值的相反数来加权求和。
考虑到AUV的经济性与实用性,将其阻力系数Cd与最大排水量V相组合,获得目标函数。本文的优化设计公式如下所示:
目标函数:
Minimize:
(3)
其中:
X1=MinimizeCd; X2=MaximizeV
SF1=100; SF2=1; W1=0.6; W2=-0.4
设计变量:

约束条件:
1.3m≤L≤1.6m; d=0.15m; r=0.015m
利用Fluent的后处理功能可以计算出主体受到的阻力,无量纲化得到阻力系数。阻力系数和升力系数的计算公式分别为:
(4)
其中:ρ为水的密度;v为入流速度;Sd为主体的迎流截面面积或表面面积(选用不同面积时,阻力系数不同,这里选迎流截面面积计算);D为阻力。
2 基于Isight的AUV外形及水动力性能优化设计
2.1 Isight整体优化流程
采用Isight多学科优化设计平台搭载优化算法—NSGA-II遗传算法,整合Solidworks、Gambit、Fluent三大集成模块实现数据交换以进行水下自航行器外形的建模、仿真,实现水下自航行器外形优化方法设计过程的高效自动化,确定最佳设计参数。
图2 AUV几何外形
2.2 参数化建模
AUV模型参数化是对AUV的几何外形采用一系列的参数进行表示,AUV的外形设计可以通过改变这些控制参数来不断修正AUV新得到的外形。本文将采用Solidworks来完成AUV参数化模型的构造。
AUV外形如图2所示,其中AUV全长L=1.48 m,最大直径d=0.15 m,头部长度a=0.155 m,中段长度b=1.08 m,尾部长度c=0.245 m,尾部切面半径r=0.015 m,整个AUV为轴对称结构。
AUV的半椭圆回转体线型的头部长度a、中段长度b和抛物线回转体线型的尾部c为设计变量,AUV全长L、最大直径d和尾部切面半径r为约束条件。这些被定义为设计变量的AUV尺寸参数都被写入VBS脚本文件中,由脚本文件和自动启动Solidworks的批处理文件GoSolidworks直接驱动Solidworks建模程序来完成AUV参数化模型的构造并自动保存一个可用于网格划分的AUV.STEP文件。
2.3 网格划分模块
首先,创建自动启动Gambit的批处理文件GoGambit实现Gambit执行的命令流文件mesh.jou的读取;mesh.jou命令流文件自动执行对AUV.STEP文件的网格划分和边界条件设定;最后Gambit将会自动导出一个可用于水动力计算的AUV.msh文件。
2.4 CFD计算模块
首先,创建自动启动Fluent的批处理文件GoFluent实现Fluent执行的命令流文件solve.jou的读取;solve.jou命令流文件自动执行AUV.msh文件的求解器、湍流模型、初始条件以及流体特性等计算设置的自动设定;最后Fluent将会自动编辑一个水动力计算结果文件output.dat。
3 AUV外形及水动力性能优化结果分析
3.1 优化结果
经过优化计算后,小型AUV的优化外形结果,如图3所示。经Isight优化后AUV外形最优解的详细报告,如图3所示。
图3 优化后AUV外形
半椭球体尾部长度c优化过程中的迭代收敛情况,如图4所示。
图4 AUV尾部外形优化迭代过程 图5 Cd与a、c的三维散点图
图5和图6分别是头部长度a、尾部长度c与优化目标阻力系数Cd和排水量V之间的散点分布关系。

图6 V与a、c的三维散点图 图7 Cd与V之间的关系图
通过图7可以看出,子目标函数排水量V和阻力系数Cd基本成抛物线关系。优化的目标是尽量降低AUV的航行阻力,同时保证一定的排水量,这两者是相互矛盾的,所以最优解的获得主要取决于加权系数Wi的设定,可以根据设计目标的优先级来最终设定影响因子。
3.2 优化前后AUV外形及水动力性能分析对比
优化前后AUV外形参数对比,如表1所示。
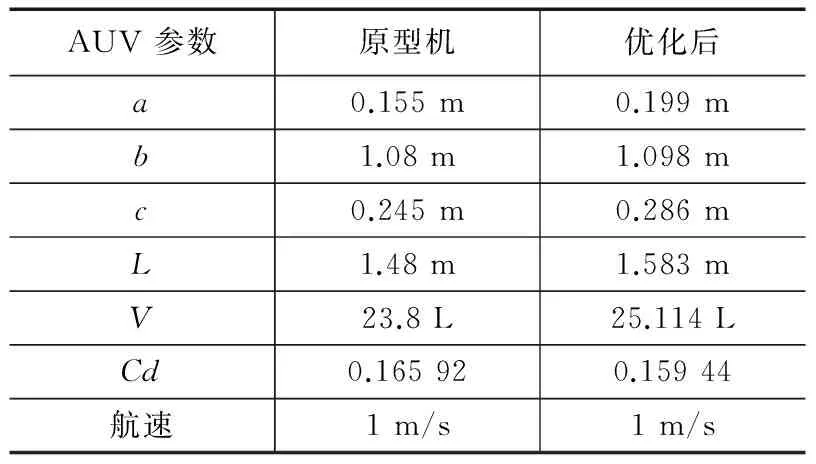
表1 AUV优化前后参数对照表
优化后AUV外形减少了尾部漩涡的产生,使分离点靠近AUV尾部,尾迹区域减小,从而减小了压差阻力,进而降低了AUV的整体阻力,使AUV的水动力性能得到了显著的提高。
图8是优化前后AUV在0°攻角、不同航速下的阻力曲线对比图。通过对比图可知,优化后AUV整体水动力性能得到了明显提升。

图8 AUV优化前后阻力曲线图
4 结语
基于多学科优化设计软件Isight,采用NSGA-II遗传算法对AUV外形及水动力性能进行仿真优化,优化后的AUV外形航行阻力明显减小的同时搭载能力还有所增强,并且其速度矢量分布、压力云分布等水动力性能指标都有所改善。
1)介绍了多目标优化设计的理论,并对AUV外形结构动力性能优化原理进行论述。
2)介绍了Isight集成各模块的过程,并对各模块的使用作了详细阐述。研究表明,基于Isight的多目标遗传优化设计方法,能很好的适用于水下自航行器外形的优化设计,为研究水下自航行器最优外形提供了一种高效的优化设计手段。
3)将优化后的AUV与原型机进行外形及水动力性能分析对比,结果优化后的AUV外形航行阻力明显减小,并且其速度矢量分布、压力云分布等水动力性能指标都有所改善。
[1] Wang P, Song B W, Wang Y H, et al. Application of concurrent subspace design to shape design of autonomous underwater vehicle[A]. In: Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing SNPD 2007. Eighth ACIS International Conference on[C]. 2007. 1068-1071.
[2] 孟凡豪. 50 kg级水下自航行器整体水动力学性能优化设计[D]. 杭州:中国计量学院, 2014.
[3] 王 鑫. 小型自治水下机器人外形优化设计及水动力特性数值模拟[D]. 青岛:中国海洋大学, 2012.
[4] 赖宇阳. Isight参数优化理论与实例详解[M]. 北京: 北京航空航天大学出版社, 2012.
[5] 任 利. 基于iSIGHT的多学科设计优化平台的研究与实现[D]. 青岛:山东科技大学, 2006.
[6] 黄海燕, 林志祥, 王德禹. 船艉结构静动态多目标优化设计[J]. 船舶力学, 2011, 15(11):1270-1277.
[7] Hassan R A, Crossley W A. Multi-objective optimization of communication satellites with two-branch tournament genetic algorithm[J]. Journal of Spacecraft and Rockets, 2003, 40(2):266-272.[8] Mosher T J. Improving spacecraft design using a multidisciplinary design optimization methodology[D].PhD thesis, Department of Aerospace Engineering Science, The University of Colorado, 2000.
[9]Deb K, Pratap A, Agarwal S, et al. A fast and elitist multi-objective genetic algorithm: NSGA-II[J]. Evolutionary Computation, IEEE Transactions on, 2002, 6(2): 182-197.
[10] Song B W, Zhu Q F, Liu Z Y. Research on multi-objective optimization design of the UUV shape based on numerical simulation[J]. Lecture Notes in Computer Science, 2010, 6145: 628-635.
[11] Brandon Morton, Terence Soule, Anthony Kanago, et al. Ordering Autonomous underwater vehicle inspection locations with a genetic algorithm [A]. In: OCEANS 2010[C]. USA: Seattle, 2010,1-6.
[12] Myring D F. A theoretical study of body drag in subcritical axisymmetric flow[J]. Aeronautical quarterly, 1976(8): 186-194.
[13] Joung T, Sammut K, He F, et al. A study on the design optimization of an AUV by using computational fluid dynamic analysis[A]. In: the Nineteenth (2009) International Offshore and Polar Engineering Conference[C]. Japan: ISOPE, 2009. 696-702.
Configuration and Hydrodynamic Performance Optimization of Autonomous Underwater Vehicle
Xue Xiafeng,Yan Tianhong
(China Jiliang University,Hangzhou 310018,China)
For the lower navigation resistance but the stronger carrying capacity of autonomous underwater vehicle, the modeling restruction and hydrodynamic performance analysis of AUV must be ongoing, which will be quite time-consuming manually. Isight,providing a multidisciplinary optimization design platform assembled with common optimization algorithm—the NSGA-II genetic algorithm,integrates Solidworks、Gambit、Fluentto modeling and simulating of the AUV shape to complete the design process of the design automatically and intelligently to achieve the optimum design parameters. The results indicate that the ultimate shape parameters of the AUV after optimization appears the lower navigation resistance but the stronger carrying capacity. Hence Isightis able to further strengthen the computing efficiency and practicability of AUV’s configuration and hydrodynamic performance optimization to improve its whole hydrodynamic performance.
AUV; multidisciplinary optimization design; configuration; hydrodynamic performance; optimization
2015-09-19;
2015-10-26。
国家自然科学基金资助项目(51379198,51075377,41176076,51121002) 。
薛侠峰(1991-),男,浙江宁波人,在读硕士研究生,主要从事水下机器人优化设计及水动力分析方向的研究。
严天宏(1971-),男,内蒙古兴安盟人,教授,主要从事高精密机器与复杂设备系统动力学、结构工程及振动控制等方向的研究。
1671-4598(2016)03-0228-03
10.16526/j.cnki.11-4762/tp.2016.03.062
TP391.9;U661
A
