风干扰下基于变船长比的无人水面艇路径跟踪方法
2016-11-17郑体强王建华赵梦铠吴恭兴
郑体强,王建华,赵梦铠,吴恭兴
(上海海事大学 航运技术与控制工程交通行业重点实验室,上海 201306)
风干扰下基于变船长比的无人水面艇路径跟踪方法
郑体强,王建华,赵梦铠,吴恭兴
(上海海事大学 航运技术与控制工程交通行业重点实验室,上海 201306)
针对无人水面艇在路径跟踪过程中易受风环境干扰的问题,建立了风环境下无人水面艇的运动数学模型,提出一种用于抵抗风干扰的直线路径跟踪方法;首先,基于视距导航原理,设计了跟踪期望航向角的PD控制器,通过融合路径方向,距离偏差及船长比等信息,实时调整左右两侧推进电机的控制电压,实现无人水面艇直线路径跟踪;然后,针对不同船长比对直线路径跟踪的影响,采用模糊控制方法,设计了以跟踪过程中的距离偏差和距离偏差变化率为输入,以船长比为输出的模糊控制模块,对船长比进行自适应调整,以提高控制器的抗风干扰性能;仿真结果表明,所提方法可减小风干扰作用下的跟踪静差,较之传统单纯PD控制方法,抵抗风干扰的能力得到提高。
无人水面艇;路径跟踪;风干扰;可变船长比;模糊控制
0 引言
无人水面艇(unmanned surface vehicle-USV),又称为水面机器人,是一种能够在水面上依靠遥控或者自主方式进行独立航行的小型化,无人化的智能平台[1-2]。当前,无人水面艇在许多领域正得到广泛应用,例如海洋生物,环境监测,军事应用以及石油和天然气产业。因此,这种自主航行器的导航和控制成为了当下船舶智能控制的一个热点。
上海海事大学航运技术与控制工程交通行业重点实验室研制出一种直流电机驱动固定双桨的无人水面艇“海博”,可通过操控两侧推进电机螺旋桨的转速差来控制无人艇的航向与航速。在不考虑风浪流干扰的条件下,已进行了路径跟踪的理论研究和实验验证[3-4]。但为了无人水面艇在风浪流环境下应用,需要研究风浪流对无人艇运动的影响,探索无人艇在风浪流环境中的路径跟踪方法。
路径跟踪是实现无人艇自主航行的关键技术之一,应用无人水面艇的目的就是代替人类执行危险任务,风浪流是无人艇航行过程中不可避免的干扰。无人水面艇在风浪流等外部干扰下的路径跟踪是当下需要解决的重要问题。目前研究无人艇路径跟踪的文献很多,但考虑风浪流干扰的文献尚少。文献[5]针对外部干扰对无人水面艇航行的影响,对风、浪、流作用下船舶的操纵运动进行了仿真计算。文献[6]针对欠驱动船舶航行中存在风、浪、流等因素干扰的情况,通过将路径跟踪问题转换到Serret-Frenet坐标系下进行研究,提出一种鲁棒跟踪控制算法。文献[7]利用风干扰下简化的滑行艇操纵运动数学模型,在不同风向以及风压力作用下对滑行艇进行了操纵性能仿真。文献[8]针对参数不确定的欠驱动船舶,研究了其在风浪流干扰下的运动航迹,并提出了一种滑模鲁棒控制方法,有效的克服了外部环境对船舶运行的干扰。文献[9]提出了一种使用单隐层前馈网络的极限学习控制方案,补偿了无人艇在外界动态干扰条件下的跟踪偏差,提高了路径跟踪的抗干扰能力。然而,以上控制方法都是基于装载舵机的无人艇数学模型而设计,通过操控舵机的转向角便可改变无人艇的航向,无法将它们直接应用于直流电机驱动固定双桨无人水面艇的路径跟踪。
本文先忽略浪和流的作用,仅考虑风的影响,基于视距导航(Line of Sight-LOS)[12]原理,提出了一种用于抵抗风干扰的直线路径跟踪方法,并与传统单纯PD控制方法进行了比较,仿真对比结果验证了所提控制方法的有效性。
1 风干扰下固定双桨无人水面艇的运动数学模型
无人水面艇在运动过程中,艇体水面以上的部分将会受到风的作用力,对无人水面艇的航向以及速度产生影响。无人水面艇遭受的风速、风向与实际的风是不同的,原因在于无人水面艇自身存在着一定的速度,其感受到的风速、风向是相对风速、风向,而实际的风速、风向为绝对风速、风向。本文假设:
1) 风是定常风,不考虑风速的变动因素,风速Vw>0;
2) 风的各个作用力和力矩可以线性叠加,不考虑耦合作用;

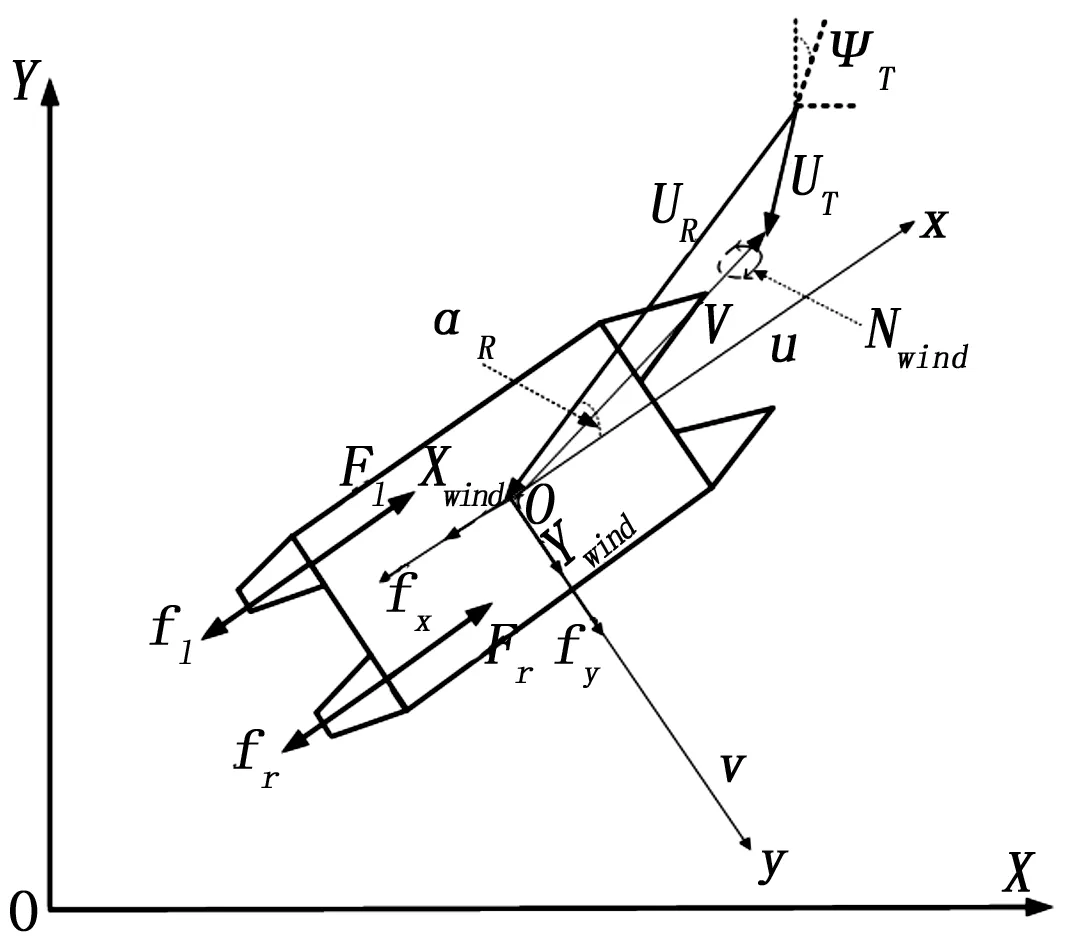
图1 风干扰下无人艇的受力分析
1.1 无干扰下无人艇数学模型[3]
忽略外界环境的干扰,静水中固定双桨无人水面艇的运动模型为:
1.2 风作用在艇体上的平均风压力和力矩
依据文献[11]所述风的数学模型,本文中风干扰对无人艇的作用可具体为平均风压力Xwind、Ywind以及转向力矩Nwind,表示为:
其中:αR表示相对风向角,也称作风舷角,ρα为空气密度,Af,As分别为艇体水线以上的正投影面积和侧投影面积,L为艇体长度;CwF为风压合力系数,Cwx,Cwy,Cwn分别是无人水面艇附体坐标系下x,y方向的风压力系数以及绕重心转动的风压力矩系数。αF和xF分别为风压力角以及风压作用中心。
1.3 风干扰下的无人艇运动数学模型
结合风环境下无人艇的受力分析,可得风干扰环境下无人艇运动数学模型:

2 基于可变船长比的直线路径跟踪方法
2.1 视距导航原理
视距导航的控制方法就是通过在目标路径上选取合适的导航点,引导无人水面艇跟踪导航点,最终使无人水面艇沿着目标路径航行,其在风干扰下的原理如图2所示。

图2 基于视距导航的直线路径跟踪原理图
αφ=αk+arctan(-h/Δ)-β
(2-1)
从上式可以看出,期望航向角αφ包含路径方向αk,距离偏差h及船长比n等信息,设计跟踪期望航向αφ的PD控制器如下:
上式中ω为无人水面艇的转动时的角速度,Ul和Ur为无人艇左右两侧直流电机的控制电压,U0为其基准电压。
2.2 控制系统结构
本文利用视距导航原理,设计了跟踪期望航向角的PD控制器,然后基于期望航向角与船长比的关系,设计了动态调整船长比的模糊控制模块,系统结构图如图3所示,
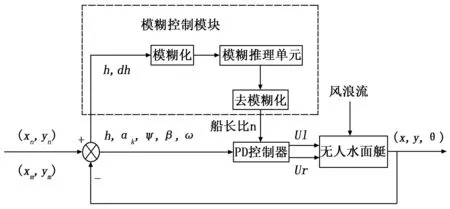
图3 系统结构图
其中,(xm,ym),(xn,yn)分别为目标路径的起始点与终止点,dh为距离偏差变化率,模糊控制模块利用距离偏差和偏差变化率为输入,经过模糊化,模糊推理,去模糊化,在线调整船长比n的值,其输出是船长比n。依据视距导航原理,跟踪期望航向角的PD控制器利用调整后的船长比n实时确定航向角偏差,计算出左右推进电机的控制电压Ul和Ur。无人水面艇的当前状态(x,y,θ)作为反馈返回到输入端。
2.3 船长比的模糊调节方法
上述视距导航原理中,可视距离Δ随船长比n的变化而变化,进而影响期望航向角αφ。经实验验证,不同的船长比对无人艇路径跟踪效果影响较为明显。为了在无人艇路径跟踪过程中实时获取合适的船长比,本文在总结了实验数据的基础上,设计了变船长比的模糊控制模块,利用距离偏差h和距离偏差变化率dh为模糊控制模块的输入语言,以船长比n为输出语言。
定义距离偏差h 的论域范围为[-15,15],模糊子集为{负大,负中,负小,零,正小,正中,正大},表示为{NB,NM,NS,Z,PS,PM,PB};定义 距 离 偏 差 变 化 率 dh 的 论 域 范 围 为 [-1.5,1.5] , 模 糊 子 集 为{负大,负中,负小,零,正小,正中,正大},表示为{NB,NM,NS,Z,PS,PM,PB};定义船长比n的论域范围为[0.5,5],模糊子集为{正小,正中,正大},表示为{PS,PM,PB};模糊推理规则如表1所示。
模糊控制模块根据输入变量的精确值,通过其各自的隶属度函数对输入变量进行相应的模糊化处理,依据所建立的模糊推理规则得到船长比n的模糊输出量,采用面积重心法对模糊输出量进行去模糊处理,得到船长比n的精确值。
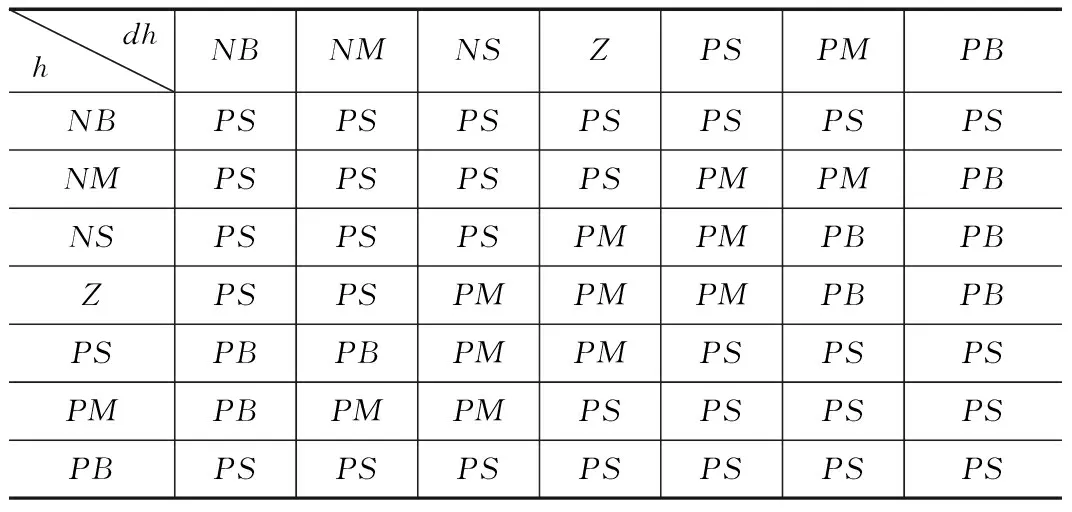
表1 船长比n模糊推理规则表
系统在正常运行时,利用无人艇跟踪路径过程中的距离偏差、距离变化率与PD控制器跟踪变量之间的模糊关系动态的调整船长比n的值,进而改变无人艇两侧控制电压的大小,以获得在风干扰环境下比较理想的动态与静态特性。
3 仿真实验
仿真对象为直流电机驱动固定双桨的无人水面艇,其在风干扰环境下的运动模型如(1)所述。通过多组实验分析,本文方法在风干扰环境下能够承受的风速最大值为7 m/s。为了验证上述路径跟踪方法克服风干扰的性能,设定风向统一,分别选取零、无穷、正、负、4种不同路径斜率下风速分别为4 m/s、7 m/s时无人水面艇的路径跟踪情况。此外,每种情况的无人艇的起始点随机的分布在直线路径两侧,并与各自情况下的传统单纯PD控制方法[3]进行比较分析,仿真结果如图4所示。
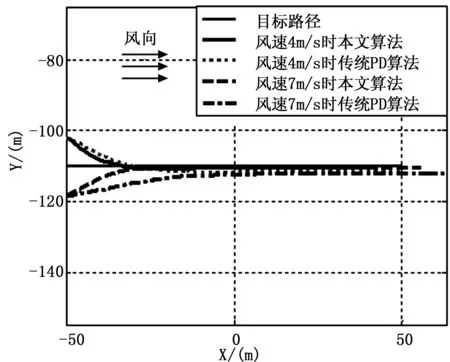
(a)跟踪直线斜率为零
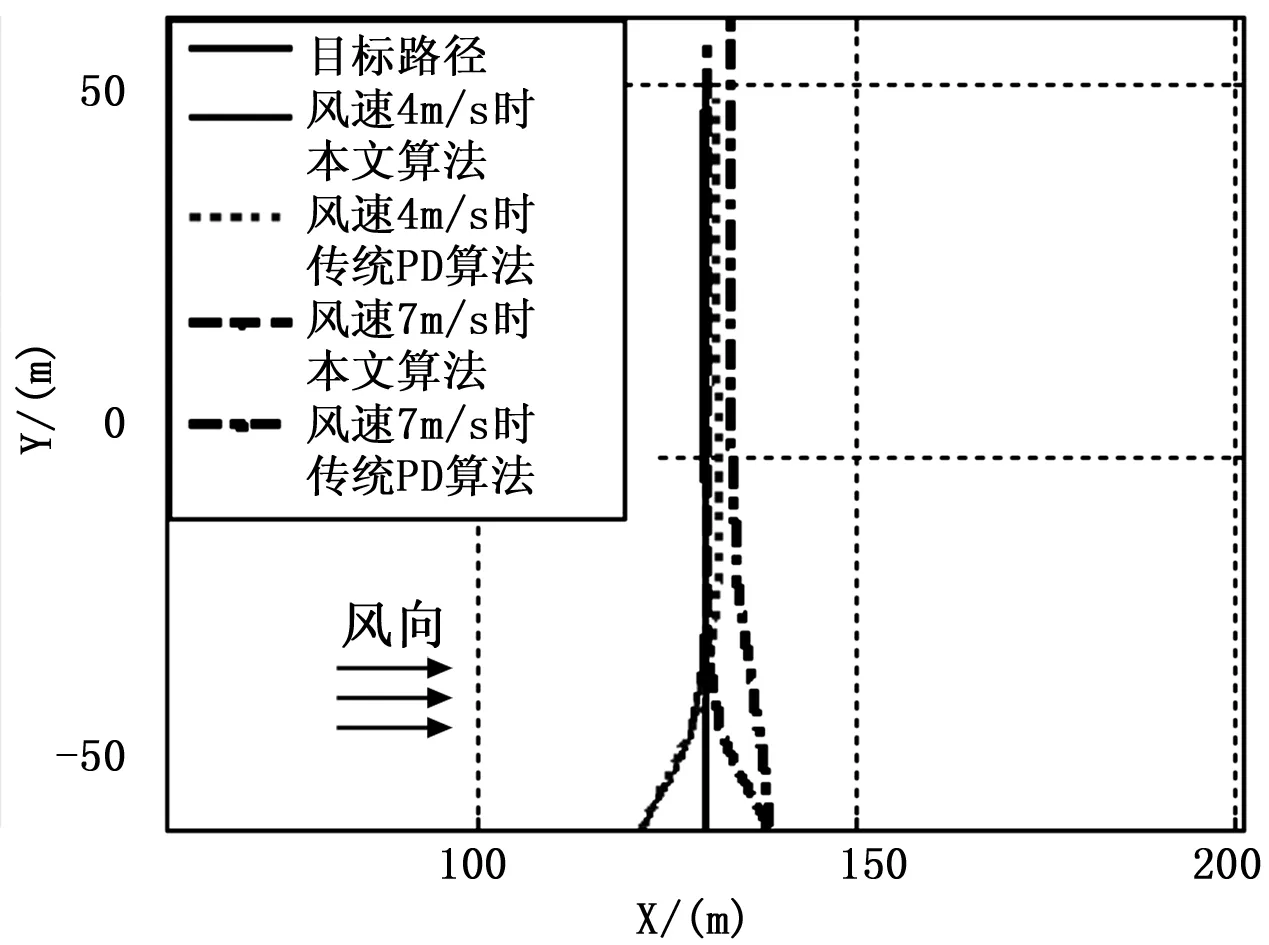
(b)跟踪直线斜率为无穷
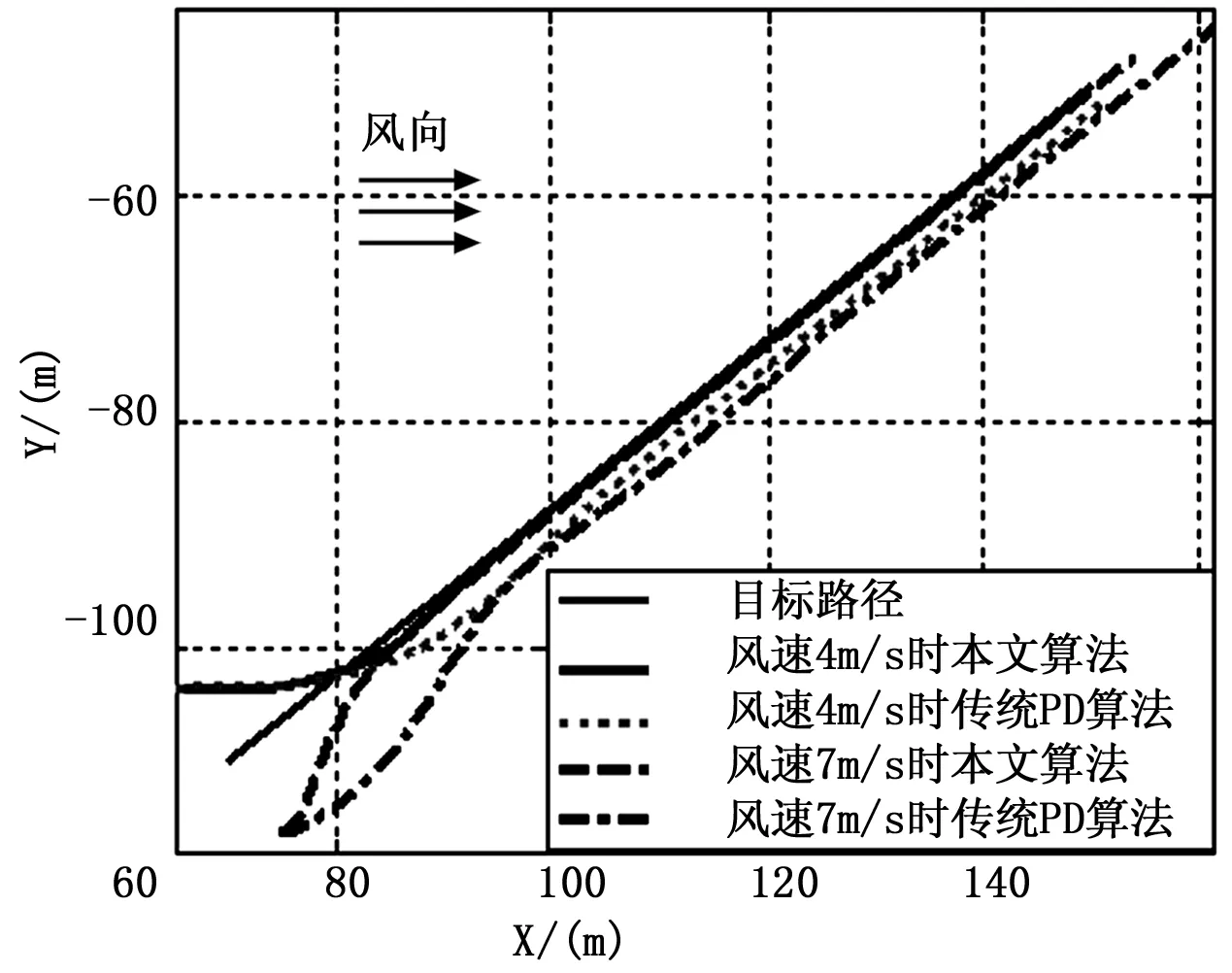
(c)跟踪直线斜率为正
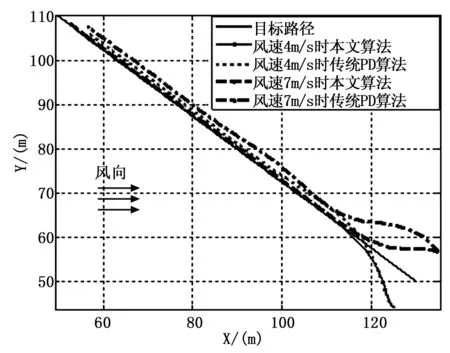
(d)跟踪直线斜率为负图4 直线路径跟踪仿真结果
由图4可以看出:(a)表明,顺风情况会造成无人艇的顺风飘移,影响路径跟踪静差,通过分析可知,顺风会产生推进无人艇前行的纵向力,使无人艇随着风向发生飘移,无法实时有效的响应转向力矩,进而产生跟踪静差。传统PD算法会使无人艇顺风快速飘移,无法准确收敛到目标路径,且随着风速增加而加剧;与之相比,相同情况下本文算法可以克服一定程度的顺风飘移,减小路径跟踪静差,有效的抑制了顺风干扰对无人艇路径跟踪的影响。(b)所示为横风条件下本文算法与传统PD算法在不同风速下的路径跟踪曲线,从图中可以看出,横风的作用会对无人水面艇产生过大的转向力矩和横向力,对无人艇的跟踪静差影响较大,传统PD算法无法抵抗转向力矩和横向力的影响,随着风速的增大而不断增大路径跟踪静差;相比之下,本文算法可使不同风速下的跟踪静差得到收敛,使无人艇能够抵御横风的干扰,相对准确的跟踪上目标路径。(c)和(d)所示为风向与跟踪路径呈一定角度时的路径跟踪曲线,由传统PD算法的跟踪曲线可以看出,此种情况下,风干扰对无人艇的顺风飘移和横向作用影响均较大,可将风的作用看作顺风和横风的共同作用;本文算法可同时发挥对二者的抑制作用,减小路径跟踪静差,明显地提高了无人艇路径跟踪过程中克服风干扰的能力。
综上,仿真实验进一步验证了所建风环境下无人艇运动模型的正确性,此外,本文所述可变船长比的控制方法不仅可以有效的抑制无人艇顺风漂移,还可以抵抗横风作用下的转向力矩与横向力,使路径跟踪静差得到减小,并且使跟踪过程具有更好的动态性能。
为了更加直观的说明本文所提变船长比跟踪算法抵御风干扰的性能,以图4(d)情况为例,图5给出了本文算法和传统PD算法的跟踪距离偏差曲线,并对此状态下无人艇跟踪稳定时的跟踪静差进行了定量分析,跟踪静差对比如表2所示。
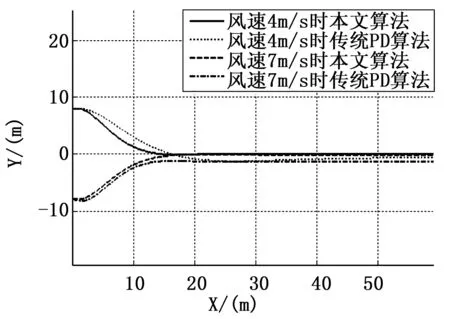
图5 距离偏差随时间变化曲线对比

跟踪方法跟踪静差传统PD方法本文算法风速4m/s时静差0.661m0.032m风速7m/s时静差1.313m0.182m
由距离偏差曲线和表2中的跟踪静差定量对比可以进一步验证,较之传统单纯PD方法,本文所提变船长比的方法可以有效的抵抗风环境的干扰,减少无人艇路径跟踪静差,具有较好的跟踪性能。
4 结束语
本文通过仿真实验研究了风干扰下固定双桨无人水面艇的直线路径跟踪,首先建立了其在风干扰环境下的运动数学模型,然后针对不同船长比对直线路径跟踪的影响,基于视距导航原理,设计了变船长比的直线路径跟踪方法,以距离偏差以及距离偏差变化率为输入,根据模糊规则动态的调整船长比,进而通过跟踪期望航向角的PD控制器实时调整无人水面艇左右两侧推进电机的电压,实现了无人水面艇的直线路径跟踪。仿真结果表明,在无人艇路径跟踪过程中,该方法可以抵抗风环境的干扰,有效的减小了路径跟踪静差,具有较强的鲁棒性,为后续的实际水面实验提供理论依据。
[1]徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,3(1):1-4.
[2]Manley J E. Unmanned surface vehicles, 15 years of development[A].OCEANS 2008[C]. IEEE, 2008: 1-4.
[3]张晓杰.无人水面艇的路径跟踪方法研究[D].上海:上海海事大学,2012.
[4]吴玉平,王建华,杨 钊.基于模糊控制的无人水面艇直线路径跟踪方法[J].计算机测量与控制,2014,22(5):1394-1397.
[5]姚云熙.水面无人艇在风浪流干扰下的运动仿真[D].哈尔滨:哈尔滨工程大学,2007.
[6]王晓飞,张葆华,褚德英.基于解析模型预测控制的欠驱动船舶路径跟踪控制器设计[J].船海工程,2012,41(1):135.
[7]马伟佳,庞永杰,杨 衡,等.水面无人艇在风干扰下的操纵性能仿真[J]-武汉理工大学学报(交通科学与工程版),2012(2):231-234.
[8]朱齐丹,于瑞亭,夏桂华,等.风浪流干扰及参数不确定欠驱动船舶航迹跟踪的滑膜鲁棒控制[J].控制理论与应用, 2012,29(7):959-964.
[9]Sun J C,Wang N,Meng Joo Er. Extreme learning control of surface vehicles with unknown dynamics and disturbances[J].Neurocomputing.167.2015:535-542.
[10]Monteiro J.R.B.A,Suetake.M. Paula.G.T. Wind velocity neural estimator for small autonomous surface vehicles[A].Second Brazilian Conference on Critical Embedded Systems[C].2012.
[11]贾欣乐,杨盐生.船舶运动数学模型—机理建模与辨识建模[M]. 大连:大连海事大学出版社,1999.
[12]Borhaug E, Pavlov A,Pettersen.K. Integral LOS Control for Path Following of Underactuated Marine Surface Vessels in the Presence of Constant Ocean Currents[A].in Proc. 47th IEEE Conference on Decision and Control[C]. Cancun, Mexico, 2008,4984-4991.
[13]John M. Daly, Michael J. Tribou and Steven L. Waslander. A Nonlinear Path Following Controller for an Underactuated Unmanned Surface Vessel[A]. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems[C]. Vilamoura, Algarve, Portugal. 2012:82-87.
[14]Signe Moe,Walter Caharija,Kristin.Path Following of Underactuated Marine Surface Vessels in the Presence of unknown ocean current[A].American Control Conference[C].2014.
[15]严浙平,张彦超,高 鹏,等.水下无人航行器水平面路径跟踪控制方法研究[J].计算机测量与控制,2011,19(12):2985-2988.
[16]Aguiar A. P. Pascoal A. M.Dynamic positioning and way-point tracking of underactuated AUVS in the presence of ocean currents[J].International Journal of Control, 2007.80(7): 1092-1108.
[17]熊云峰.大风浪中船舶航向优选方法探讨[J].世界航运.2005(1):23-25.
Path Following Method of Unmanned Surface Vehicle Based on Variable Ship Length Rate Under the Wind Interference
Zheng Tiqiang,Wang Jianhua,Zhao Mengkai,Wu Gongxing
(Marine Technology & Control Engineering Key Laboratory, Shanghai Maritime University, Shanghai 201306, China)
In order to resist the wind interference that may occur when the Unmanned Surface Vehicle(USV) follows the straight path, the mathematical model of the USV in the wind environment is established and a straight path following method for resisting wind interference is presented. First,based on the principle of Line of Sight(LOS), the PD controller that follows the desired heading angel is designed, which can adjust the control voltage of the left and right propulsion motor timely,so that the USV can follow a straight path through fusing ship length rate,path orientation,distance error and other information.Then, according to the influence of ship length rate on straight path following, a fuzzy control module whose output is ship length rate and whose inputs are the distance error and the derivative of distance error is designed ,which is used to adjust ship length rate so as to improve the performance of resisting wind interference.The simulating experiments show that the proposed method can reduce the static following error under the wind interference.In comparison with the traditional PD method ,the ability to resist wind interference is improved.
USV;path following;wind interference; variable ship length rate ;fuzzy control
2015-09-01;
2015-11-04。
国家自然科学基金(51309148);上海市教委科研创新项目(14YZ104);上海海事大学研究生学术新人培训计划(YXR2015024)。
郑体强(1990-),男,江苏徐州人,硕士研究生,主要研究方向为船舶与港口自动化技术方向的研究。
1671-4598(2016)03-0163-05
10.16526/j.cnki.11-4762/tp.2016.03.044
TP311
A
