一种关于挠性加速度计温度控制系统设计方法
2016-11-17苏立娟曾勇超王颂邦李仁杰
刘 玲,苏立娟,曾勇超,王颂邦,李仁杰
(北京航天时代光电科技有限公司,北京 100094)
一种关于挠性加速度计温度控制系统设计方法
刘 玲,苏立娟,曾勇超,王颂邦,李仁杰
(北京航天时代光电科技有限公司,北京 100094)
为了提高石英挠性加速度计的零偏稳定性指标,确保惯性导航系统定位定向精度,需要石英挠性加速度计长期工作在稳定的环境温度范围内,相应的温度控制系统设计技术尤为关键;针对某高精度惯性导航系统对温度控制精度指标的实际需求,首先设计了以DSP为核心控制器的温度控制硬件电路;同时以加速度计组件为控制对象,建立温控模型,采用PWM波控制策略及增量式PID控制算法,利用MATLAB仿真工具获得较优的控制参数;在DSP中开发了温度控制程序,并进行参数整定、指标测试,最终使加速度计工作环境温度稳定在55±0.2 ℃范围内;通过实际应用验证表明,该方法针对石英挠性加速度计工程应用特点,实现的温度控制精度高,稳定性好,能够为惯性导航系统的高精度使用奠定基础。
温度控制系统;石英挠性加速度计;系统建模;PWM控制;PID控制
0 引言
惯性导航系统自20世纪40年代诞生以来,可自主实现载体定位定向,且具有抗干扰性、隐蔽性强的特点,广泛应用于航空、航天、航海及车载导航等军事战略领域,一直倍受各国重视与发展[1]。作为惯性导航系统的关键部件,加速度计中的石英挠性加速度计精度高、体积小、价格低、可靠性高,应用最为广泛。经过多年的研究应用实践表明,石英挠性加速度计的零偏稳定性受环境温度波动的影响。为了实现高精度定位定向,需要设计加速度计温度控制系统,使加速度计工作在稳定的温度条件下。
1 系统结构及原理
某高精度惯性导航系统,使用环境温度范围:15~30 ℃,要求石英挠性加速度计稳定时间小于2 h;依据工程经验,温度需稳定在55±0.2 ℃以内[2]。
本文控制对象为加速度计组件,被控制量为温度,控制量为加热器功率。温度控制系统原理框图如图1所示。其中,被控对象加速度计组件包括加速度计结构件,及安装在结构件上的3只加速度计;控制单元为DSP+FPGA;执行单元包括继电器及加热器;测量单元包括温度传感器及采温放大电路;温度的采集、解算、比较,PID控制算法及PWM波输出均由DSP与FPGA实现。系统采用增量式PID控制算法,解算得到PWM波占空比并输出对应波形,控制加热器间歇性地输出功率,使被控对象温度稳定在目标范围内。

图1 温度控制系统原理框图
以下分别介绍PWM波控制原理以及增量式PID控制算法。
1.1 PWM控制原理
通过PWM波控制继电器的占空比实现对加热器的输出控制,当继电器导通时,加热器以恒定功率输出;反之,加热器停止工作。原理如图2。M、S分别为导通、关断时间,T为固定周期值,M、S可调节,T=M+S[3]。

图2 PWM波示意图
根据焦耳定律:
(1)
式中,P为加热功率;Irms为加热器输出等效电流;R为加热器阻值。
一个PWM控制周期内等效加热电流如式(2)所示。
(2)
式中,I0为加热器输出瞬时电流。
代入式(1),得到加热功率见式(3)。
(3)

1.2 增量式PID控制算法
基本数字PID算法分为位置式PID和增量式PID,公式分别见式(4)、式(5)[4-5]。
(4)

(5)
式中,u(k),u(k-1)为分别为第k、k-1次采样时刻输出控制量;e(k),e(k-1)分别为第k、k-1次采样时刻输入的偏差值;KP,Ki,KD分别为比例、积分、微分系数。
根据公式可知,增量式PID只需要对近3次偏差值进行累加,系统故障时影响范围小,故采用增量式PID算法。
2 控制系统设计实现
2.1 控制系统硬件设计
本文温度控制系统主要由测量单元、控制单元、执行单元、控制对象四部分构成,如图3所示。

图3 系统框架图
2.1.1 测量单元
包括测温传感器、温度采集放大电路、A/D转换电路。测温传感器采用热敏电阻器(NTC)MF6-6-12 kΩ;温度采集放大电路原理图见图4;通过模拟开关JC4067来实现通道切换,采用14位精度的A/D590来进行A/D转换。在DSP芯片中设计温度解算算法,将A/D采样值换算为测量温度。

图4 温度采集放大电路原理图
2.1.2 控制单元
受DSP采集通道数量限制,选择DSP+FPGA的方案,计算机处理芯片采用TI公司C6000系列浮点处理器TMS320C6713BGDPA200,FPGA采用ACTEL公司的AFS600-FGG256I。FPGA完成温度数据A/D转换后的采集,DSP软件完成控制算法,输出固定频率的PWM占空比给FPGA,由FPGA产生PWM波控制继电器闭合,从而实现加热器的间歇性功率输出。
2.1.3 执行单元
包括驱动电路、继电器及加热器。驱动电路原理图见图5,采用三极管3DK105B驱动JGC-2MA固体继电器来启动加热器的功率输出。加热器选择薄膜型电加热器。
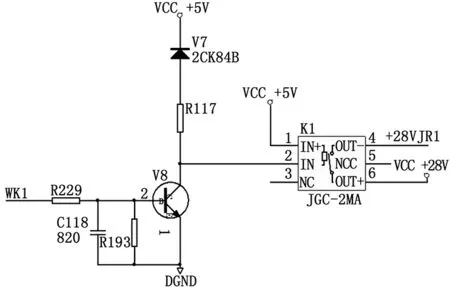
图5 温控驱动电路原理图
2.2 程序设计实现
每控制周期内,FPGA对温度进行1次A/D采集,DSP软件进行温度解算,通过预置增量式PID算法得到本周期PWM占空比;FPGA根据占空比输出继电器导通信号,PWM波输出调整频率设定为1 Hz,即输出导通时间为1 ms的整数倍。DSP软件程序在中断程序中完成对数据采集函数、PID控制算法解算功能函数的调用。下面主要介绍PID控制算法软件实现过程。
为缩短从系统启动到加温至55 ℃的时间,温度控制算法分全速加温、PID调控两个阶段,图6为温控PID算法流程图。设置54.5 ℃为系统全温控和PID调控模式的切换点。当实时温度小于等于54.5 ℃时,系统全速加温,PWM占空比为100%;在大于54.5 ℃小55.5 ℃范围内通过增量式PID调控温度稳定在55 ℃稳附近;大于等于55.5 ℃,置占空比为0。
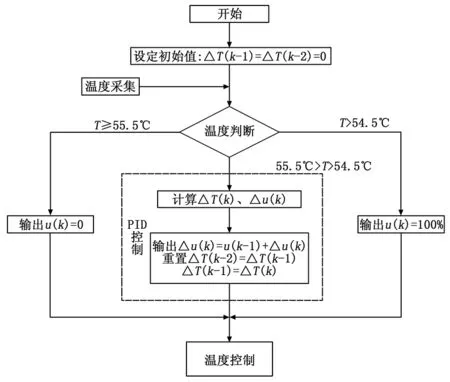
图6 温控算法流程图
2.3 温度传感器参数确定
温度测量误差直接影响控制精度,MF6-6-12kΩ型温度传感器输出与理论温度的倒数成指数关系,见式(6),不便于在DSP软件中直接求解温度;若通过参考温度对温度传感器输出进行建模,既耗时又会因为采样点的离散性而增大测量误差。
(6)

Dout为温度传感器A/D采样输出值;T为温度传感器测量理论温度值,单位:℃;R0为12 000;B为4 300;T0为298.15 K。
通过MATLAB工具,用三阶函数近似拟合温度与传感器输出的函数关系,见式(7)。极大降低了温度解算的复杂度。
T=p3×Dout3+p2×Dout2+p1×Dout+p0…
(7)
温控点附近,40~60 ℃温度范围内,三阶函数拟合得到的温度与理论温度的误差曲线如图7,误差小于0.03 ℃,适应温度控制精度要求。

图7 拟合解算温度与理论温度误差曲线
2.4 被控对象建模
控制对象为加速度计组件,引起温度上升的因素有加热器功耗、加速度计热耗,引起温度下降的主要因素是组件通过传导、对流、辐射的方式向外界环境散热。由于加速度计功耗小(3只约1 W),组件结构件外表面黑色阳极化处理,辐射度小,因此可忽略加速度计热耗、组件辐射热量的影响。当温度控制对象温度升温至55 ℃后,根据能量守恒定律,温度控制对象热平衡方程如式(8),按受控对象输入、输出流的形式,改写成式(9)。
(8)
(9)
(10)
(11)
(12)
式中,Qi为加热器输出热量;Qo1为被控对象通过传导方式消耗的热量;Qo2为被控对象通过对流方式消耗的热量;C为物体热容,285.2 J/K;P为加热器输出功率,被控对象达到热平衡时可近似为固定值;Ac为被控对象与其他部件接触面积,122.5*10-6m2;hc为接触传热系数,1 400 W/m2·℃;S为被控对象与外部空气接触面积,0.006 m2;h为对流换热系数,5.5 W/m2·℃;T为组件温度;ΔT为组件温度变化量;T0为环境温度。
在起始的稳定平衡工况下,温度变化量为0,式(9)变为:
(13)
将式(13)~式(9)相减,并用增量形式表示各个量偏离其起始稳态值的程度,ΔQi=Qi-Qi0,ΔQo1=Qo1-Qo10,ΔQo2=Qo2-Qo20,得到平衡方程的增量形式为:
(14)
将式(10)~(12)代入,得:
(15)
两边对t求导,整理得:
(16)
以△P为输入量,△T为输出量,对上述公式进行拉普拉斯变换,得到温控对象的传递函数,为一阶惯性环节形式,如式(17)所示。
(17)

2.5 PID控制器参数确定
在被控对象模型确定的基础上,通过MATLAB仿真工具搭建PID温度控制系统,以获得合适的PID控制器参数,系统框图见图8。

图8 温控系统仿真框图
PID各参数对系统时域响应的影响规律如下:比例系数Kp越大,响应速度越快,稳态误差越小,但会降低系统稳定性;积分参数Ki,可用来消除系统静态误差,提高系统控制精度;Ki越小,响应时间越短,但会降低系统稳定性;微分参数KD反映偏差的变化趋势和变化率,缩短调节时间,太大容易造成系统不稳定[6]。
参考PID参数对系统时域响应的影响,按照先选定P,再调节I,最后确定D的顺序,在仿真系统中调试PID参数,参考动态特性参数整定法[7],最终选定Kp为2.75,Ki为0.002,KD为0.002。系统单位阶跃响应曲线见图9,超调量小于4%,2 h后稳态误差小于0.1%,可满足温度控制精度55±0.2 ℃要求。
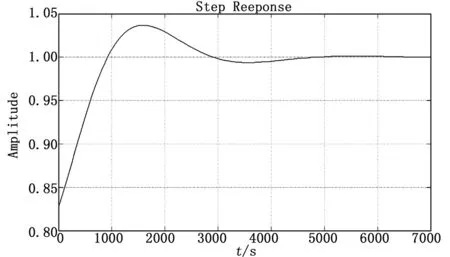
图9 温控系统单位阶跃响应曲线仿真图
3 性能调测试结果
常温下系统通电12 h以上,加速度计组件实际温度输出曲线如图10,温度与占空比输出曲线如图11。

图10 加速度计温度输出曲线
由图10可知,从常温加热至55 ℃约25 min。
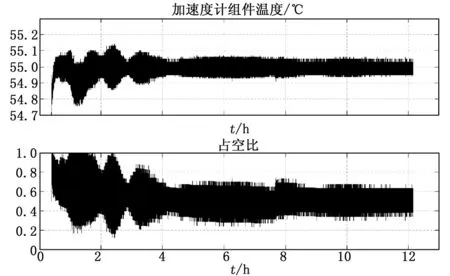
图11 加速度计温度输出曲线
由图11可知,2 h后温度可稳定在55±0.2 ℃内,满足设计指标要求。0.5 h~4 h之间,温度输出产生波动,影响因素有:系统存在超调,精度调整引起;热量传导存在延迟,系统达到热平衡需要一定时间。
4 结论
试验结果表明,本文设计的温度控制系统能使加速度计温度稳定在高精度使用要求范围内,控制效果明显,方法切实可行。
温度控制系统设计成功的关键在于加热器功耗的合理选定,系统模型的建立,PID控制器参数的整定等方面。此温控系统有以下几点待改进:系统建模时考虑延迟环节,以得到更精确的系统模型;优化FPGA软件,减小PWM输出控制量量化误差,实现更高的控制精度。
[1] 秦永元,惯性导航[M].北京:科学出版社,2006.
[2] 冯士伟,李 勇,武志忠,等.一种一阶延迟惯性环节温控系统优化设计方法[J].空间控制技术与应用,2015,41(2):41-45.
[3] AKpado K A,Ezeagwu C O,Ejiofor A,et al.Design,Modeling and Simulation of a Microcontroller Based Temperature Contorl in a Ventilation System[J]. International Journal of Advanced Research in Electrical,Electronics and Instrumentation Engineering vol.2,Issue 7,July 2013.
[4] 郭少朋,吴岚军.基于TMS320F240的PID和PWM温度控制[J].仪表技术,2004(4):44-46.
[5] 陈 涵,陆蕴香,等.基于PWM和PID对三维打印喷头的恒温控制[J].贵州师范法学学报,2015,33(2):72-75.
[6] 李 健,陈 晨,薛顶柱,等.基于PID算法的激光器恒温控制系统的设计[J].激光杂志,2015,36(4):38-41.
[7] 金以慧,过程控制[M].北京:清华大学出版社,1993.
A Temperature-control System Designing Method for Auartz-flexibility Accelerometer
Liu Ling,Su Lijuan,Zeng Yongchao,Wang Songbang,Li Renjie
(Beijing Aerospace Time Opto-electrical Technology Co.Ltd., Beijing 100094, China)
In order to enhance the zero offset stability of auartz-flexibility accelerometer and ensure location accuracy of inertial navigation system, the auartz-flexibility accelerometer needs to work under a stable environment temperature. Thus, the temperature-control system design is fairly significant. Based on the specific requirements of temperature-control accuracy for a high-precision inertial navigation system, a temperature-control circuit was first designed with DSP circuit as the core controller. Then, a temperature-control model, which uses PWM as well as PID method, was built with the accelerometer assembly as the object. By MATLAB simulation and temperature-control algorithm developed in DSP circuit, the optimized parameters of the controller can be obtained. Finally, the working environment temperature of accelerometer can be stabled at 55±0.2 ℃. Experimental results verify that this kind of temperature-control design for auartz-flexibility accelerometer is able to offer high accuracy of temperature-control and fine stability. Thus, it can be applied in high-precision inertial navigation system.
temperature-control system;auartz-flexibility accelerometer;system model;PWM control;PID control arithmetic
2016-03-31;
2016-05-24。
刘 玲(1985-),女,四川邻水人,工程师,硕士研究生,主要从事光纤陀螺惯组总体技术方向的研究。
1671-4598(2016)09-0136-04
10.16526/j.cnki.11-4762/tp.2016.09.037
TP3
A
