高精度空气密度测量系统设计
2016-11-17田光宇张馨龙
王 旭,黄 勇,田光宇,张馨龙
(清华大学 电动汽车国家重点实验室,北京 100084)
高精度空气密度测量系统设计
王旭,黄勇,田光宇,张馨龙
(清华大学 电动汽车国家重点实验室,北京 100084)
为了在与质量标准相关(质量、力值、密度)的高精度量值传递过程中修正空气浮力对测量结果的影响,文章通过对被测质量周围环境参量(温度、湿度、压力、CO2含量)的测量,利用温湿压法实现空气密度的高精度测量,提供空气浮力修正所必须的空气密度参数。
温湿压法;空气密度;环境参量;高精度测量
在与质量标准相关(质量、力值、密度)的高精确度量值传递过程中,必须考虑质量量值在传递过程中空气浮力修正对测量结果的影响[1]。质量空气浮力修正的计算公式中包含空气密度、砝码或被测物体的体积和标准砝码的体积3个重要参数,这些参数需要精确测量。砝码在空气中进行质量测量时,标准质量和被测质量之间都会受到空气浮力的影响,不能正确地反映物体的实际质量。国家计量检定规程中规定:在质量量值传递过程中需要修正空气浮力对砝码的影响[2-3]。由于在与质量标准相关的高准确度测量系统里没有空气密度参数的测量装置,不能确定空气密度参数。因此,文章通过测量被测物体周围的温度、湿度、压力、CO2含量等参数,利用温湿压法,设计并开发出能够进行空气浮力修正的高精度空气密度测量系统,以改善当前的高准确度测量系统。
1 研究背景
研究课题基于《国家中长期科学和技术发展啊规划纲要(2006—2020)》第9条提出“建立国家标准、计量和检测技术体系,研究制定高精确度和高稳定性的计量基标准和标准物质体系,以及重点领域的技术标准,完善检测实验室体系、认证认可体系及技术性贸易措施体系”。《纲要》表明基础件和通用部件:重点研究开发重大装备所需的关键基础件和通用部件的设计、制造和批量生产的关键技术,开发大型及特殊零部件成形及加工技术、通用部件设计制造技术和高精度检测仪器。高准确度质量、力值、扭矩[4]、压力[5]等参数的量值传递通常在空气环境中完成,空气浮力对被测件在测量过程中的影响无法忽略。物体空气浮力修正的计算公式中包含潮湿空气密度和被测物体体积2个重要参数,这些参数都需要通过精确测量得到。本文的研究目标在于为高精度密度测量系统设计出总不确定度达9×10-4的高精度空气密度测量系统。
本文内容包括了为高精度密度测量系统设计合理的方案,包括选择合理的空气密度计算原理、传感器选型设计、硬件电路设计、软件电路设计,同时设计并进行合理的测量实验,以验证本文中空气密度测量系统的设计能够达到预期的要求。下面对具体工作进行详细的阐述。
2 方案设计
2.1测量原理
空气密度通常采用公式法进行计算测量。CIPM推荐用于确定空气密度ρa的公式为[6-8]:
(1)
其中,所有参数如表1所示。
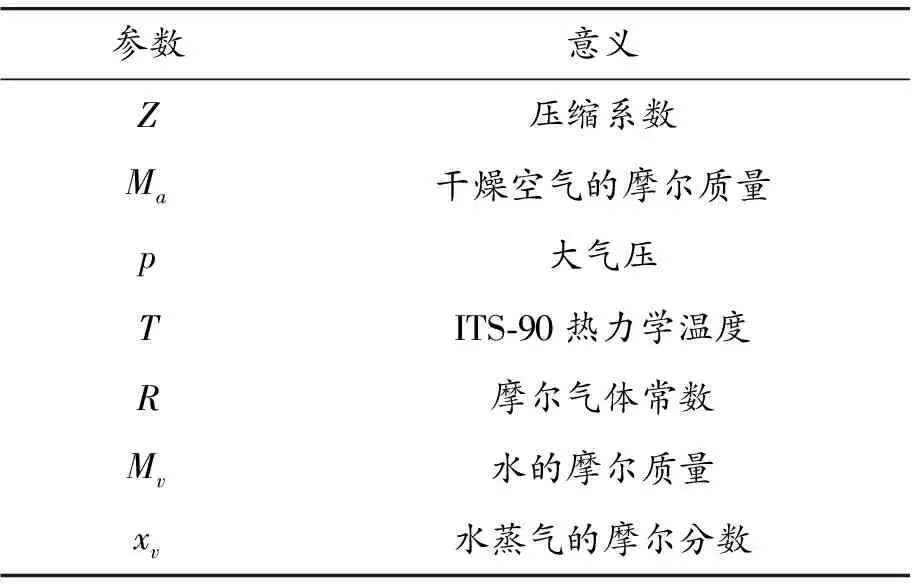
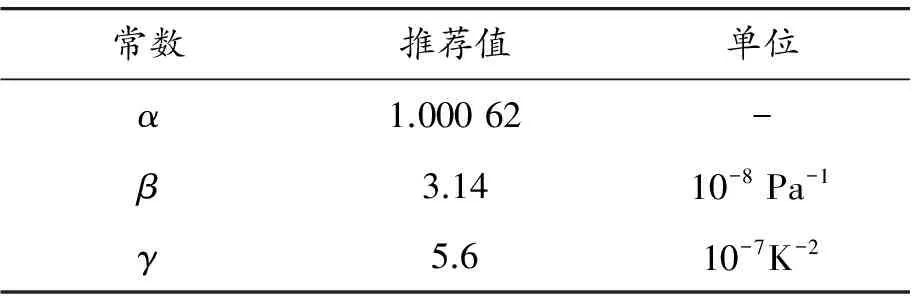
表1 常数推荐值
其中,Ma、Z、xv用实际环境中的大气压、CO2、温湿度的测量结果代入公式计算获得。一般情况下,CO2含量取400×10-6,因此只需测量实际环境中的温湿度、CO2含量和大气压,因此该方法又叫做温湿压法。
上述公式被称为CIPM-81公式,发表于1981年。后来,该公式中的推荐使用参数经过反复修正,最近的版本为CIPM-2007公式,该公式由第96次CIPM大会认可通过[8]。因此,最新的空气密度计算公式采用CIPM-2007公式中的推荐参数。
当可以测量CO2含量时,计算干燥空气的摩尔质量Ma的公式为:
Ma=[28.965 46+12.011(xCO2-0.000 4)]×10-3kg/mol
(2)
式中xCO2为CO2的摩尔小数。
CIPM-2007公式[9-11]采用了最新的氩气含量xAr值和摩尔气体常数R值:
水蒸气摩尔小数xv为:
(3)
其中,h为相对湿度,0≤h≤1;f为增强因子,与大气压p和温度t有关,计算关系在下文说明;psv为空气压力。
(4)
其中,A、B、C、D的推荐值可查表2,计算公式中的T采用ITS-90温度。

表2 常数A,B,C,D推荐值
增强因子f由p和t计算得出,其计算公式如下,其中常数系数的推荐值见表3。
(5)
压缩系数Z是由空气的维里系数导出[12-13],其计算公式为:
(6)
其中a0,a1,a2,b0,b1,c0,c1,d,e为常数。推荐值如表3。
因此,为了获得高精度的空气密度计算结果,必须精确测量公式中相关的大气温湿度、大气压力和CO2含量数据。
2.2系统设计
空气密度测量系统如图1所示,包括温度传感器、湿度传感器、压力传感器、CO2含量传感器、数据采集系统、显示仪表等部件。该系统采用高精度的传感器,准确测定质量环境系统中的温度、湿度、压力、CO2含量等参数,通过CIPM公式确定质量测量环境中的空气密度值。

图1 空气密度测量系统示意图
从功能上看,空气密度测量系统包括了数据采集功能、空气密度计算功能、显示功能(仪表显示和上位机通讯显示)。如图1所示,空气密度测量系统分为上位机和系统终端2个部分。将空气密度测量系统终端连接电源,经过测量和单片机的计算,液晶显示屏显示空气密度测量值,并且将数据通过串口发给上位机,上位机经过计算可以得到经过空气密度浮力系数修正过的高准确度砝码质量测量结果。
2.3传感器选择
根据要求,为了提高空气浮力修正的精度,空气密度测量系统的总不确定需要达到9×10-4。关于空气密度系统的不确定度具体计算将在实验验证部分进行详细阐述。在进行系统设计前,需要明确系统的总不确定度来自部分——公式部分和传感器数据的不确定度。因此,为了使得空气密度测量系统的总不确定度达到规定的要求,需要选用高精度的传感器。
经过筛选,本文选用了Vaisala公司的温湿度传感器、CO2传感器和大气压传感器。Vaisala公司是芬兰著名的工业测量仪器设备制造商,其环境测量产品在世界上居领先地位。
下面分别对本文所使用的各个传感器进行介绍。传感器的选择是整个空气密度测量系统能够达到预期工作要求的关键。选择不确定度达到一定要求的传感器才能保证系统的总不确定度在需要的范围之内。另外,传感器不同的供电电压将会影响到系统供电电路的设计,不同的串口输出电平也会影响到系统串口通讯电路的设计。
图3所示为选用的Vaisala公司的HMT120温湿度传感器,其采用24了V直流电源供电,可以输出模拟量和数字量,这里采用其RS232电平串口通讯模式。在0~40 ℃条件下,其湿度的不确定度为1.5%。在15~25 ℃条件下,其温度不确定度为0.2 K。

图2 HMT120温湿度传感器
图4所示为选用的Vaisala公司的GMM222 CO2传感器。该传感器采用12V直流电源供电,可以输出模拟量和数字量,这里采用TTL电平标准的串口通讯方式。在0~2 000×106量程下,其不确定度为30×106。

图3 GMM222 CO2传感器
图5所示为选用的Vaisala公司的PTB210大气压传感器。该传感器采用5V直流电源供电,可以输出模拟量和数字量,这里采用TTL电平标准的串口通讯模式。其在500~1 100 hPa量程范围内,不确定度为0.25 hPa。

图4 PTB210大气压力传感器
由于空气密度测量系统用于实验室条件下,假设在标准大气压下,温度为25 ℃,湿度为50%,二氧化碳浓度为400×106的条件下,计算得到空气密度为1.169 1 g/cm3。采用上述传感器提供的最大不确定度,根据不确定度相对合成公式(具体计算方式将在实验部分详细阐述)计算得到其总不确定度为4.5×10-4,满足实际要求。因此,上述选取的传感器可以满足设计的需要。
2.4硬件设计
空气密度测量系统选用Vaisala公司的高精度传感器,包括大气压力传感器、CO2传感器及温湿度传感器。所有传感器均采用串口输出,输出量均为数字量。然而,对于大气压力传感器和温湿度传感器来说,串口输出采用RS232电平,对于CO2含量传感器采用TTL电平,因此在通讯硬件电路设计时有所区别。
液晶显示屏采用4.5英寸串口彩色液晶屏,开发简单,程序设计方便,同时彩色大屏可以显示丰富的内容。
空气密度测量系统终端与上位机之间采用串口通讯。单片机串口输出TTL电平与PC的RS232电平之间需要在硬件电路中做电平转换。
空气密度测量系统采用英飞凌公司生产的16位单片机XC2267,管脚图见图3。这款单片机由英飞凌公司设计用于车身控制,因此具有车用级别的标准。XC2267上集成了丰富的资源,包括输入输出I/O模块、GPT中断定时模块、WDT看门狗定时模块、EEPROM存储模块,同时具有6路串行通道,完全能够满足空气密度测量系统设计的要求。
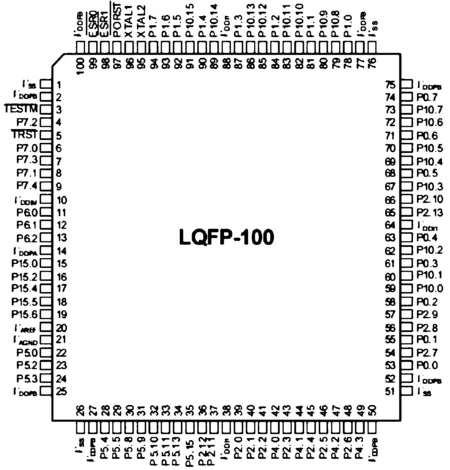
图5 XC2267单片机管脚
硬件电路图如图4~6所示。
图4为XC2267芯片最小系统电路原理图。此部分是保证单片机能够正常工作所必须的最小外围电路。其中包括了时钟部分、复位部分以及OCDS单片机程序下载部分电路原理图。
图5是空气密度测量系统终端的电源模块部分电路原理图。电源部分需要给单片机及各芯片、各传感器及液晶显示屏供电。其中,单片机及各芯片、液晶显示屏、压力传感器采用5 V供电,温湿度传感器采用24 V供电、温湿度传感器采用 12 V供电。由于所有部件的供电电路都集成在一起,因此为了防止各部件供电时的电流波动可能会对单片机等部件造成损坏,在供电电路设计过程中,选用隔离式DC/DC电源模块。
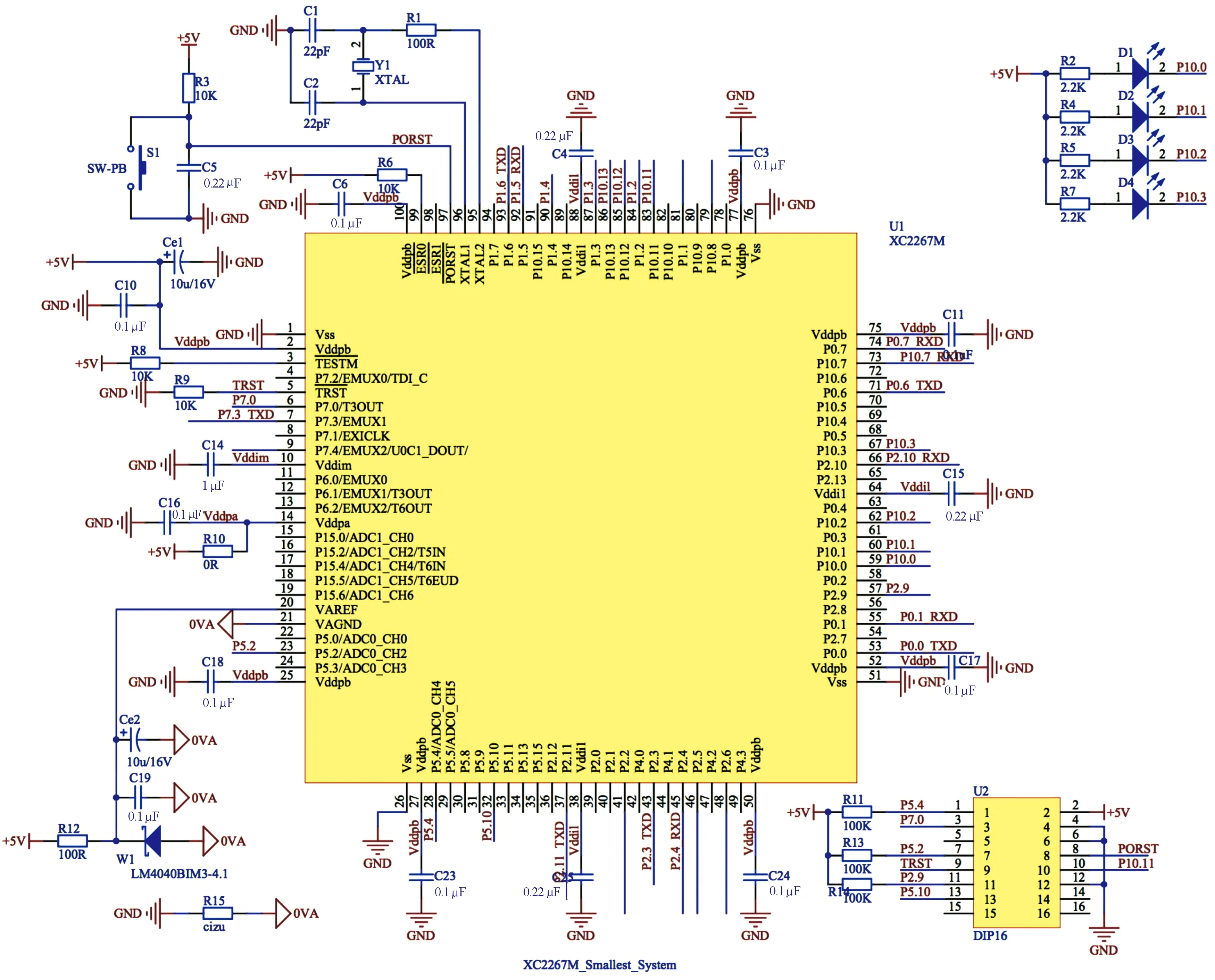
图6 最小系统电路原理

图7 电源模块电路原理

图8 数据采集及通讯模块电路原理
图6为数据采集和通讯模块电路原理。数据采集部分与传感器之间通过串口通讯发送指令并接收数据。通讯模块包括单片机与液晶显示屏和PC上位机之间的通讯。单片机、液晶显示屏、CO2传感器串口通讯都采用TTL电平,而压力传感器、温湿度传感器和PC机串口通讯采用RS232电平。因此,在串口通讯电路设计时,不同电平之间需要进行电平转换,本次设计中采用美信公司设计的MAX232驱动芯片。
空气密度测量系统终端PCB绘制如图7所示。
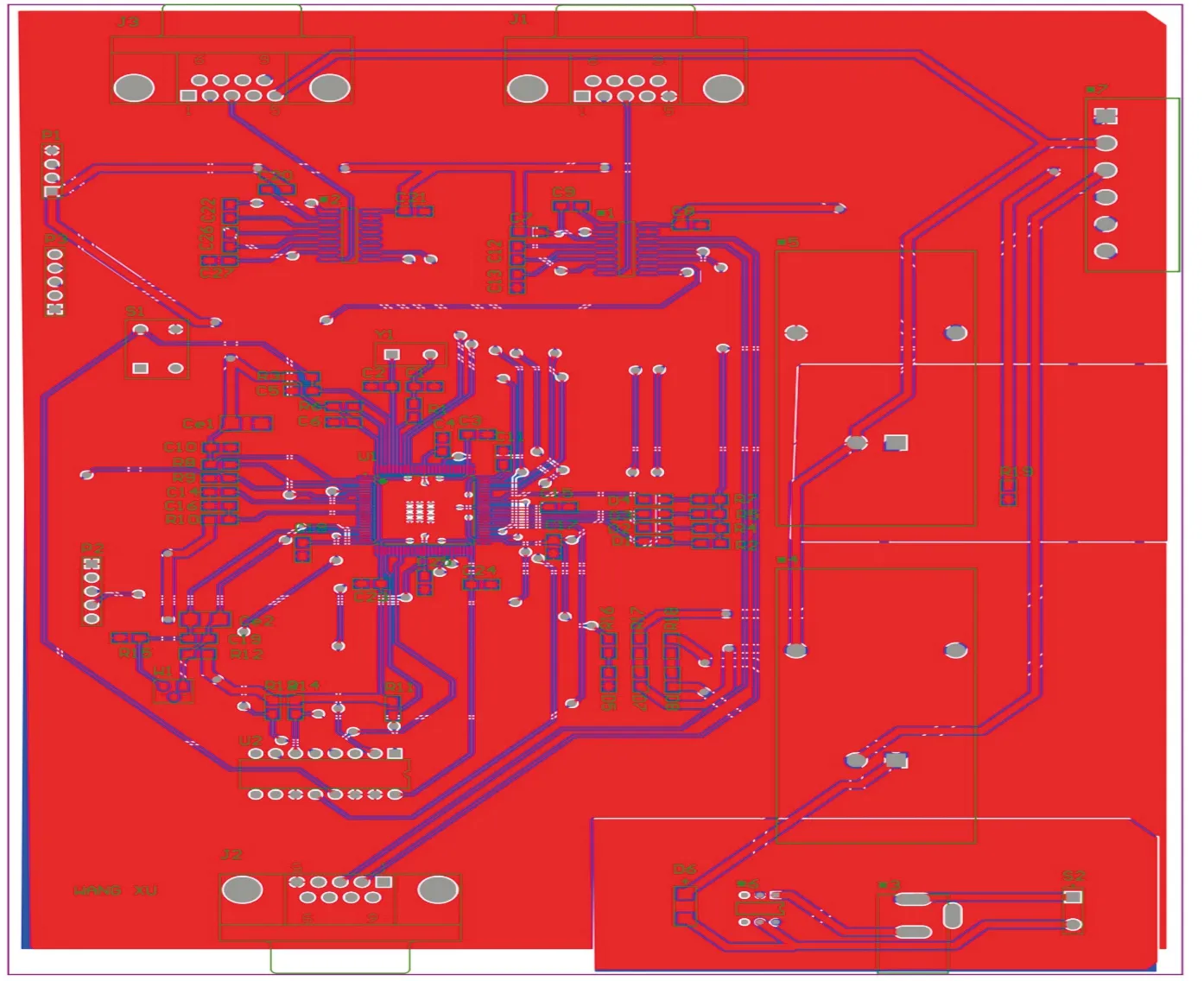
图9 空气密度测量系统终端PCB电路图
经过调试修改和验证,上述硬件设计中的最小系统模块、电源模块和数据采集和通信模块均达到了预期的设计目标,因此空气密度测量系统的终端硬件设计可以满足设计需求。
2.5软件设计
在空气密度测量系统的开发过程中,硬件电路是让系统正常运转的前提,而软件的设计不仅能让硬件的功能得到发挥,还能实现硬件电路无法实现的功能。好的软件设计关系到系统结果的准确性、运行效率的高低和系统的可维护性,因此软件设计是空气密度测量系统的核心。
下面介绍空气密度测量系统软件部分的设计。软件部分的设计是以系统实现的功能为基础的,采用结构化和模块化的设计思想,使设计层次清晰、思路明了。
从功能上看,软件部分需要与各传感器之间进行通讯并准确采集各传感器的数据,利用CIPM-2007公式计算空气密度值,与上位机之间进行通讯,并保证合适的计算周期。
从软件架构上看,软件部分主要分为2个部分:
1) 主程序部分:
主要用于实时性要求较低的流程,在本次设计中主程序主要进行数据初始化、主函数初始化及各传感器的通讯建立,并不进行其他任务;
2) 中断服务程序:
主要用于完成实时性要求较高的任务,当各中断服务模块提出中断请求时,单片机将从主程序跳进中断程序运行,完成对应的中断任务后再跳回主函数。在本设计中,由于需要保证空气密度计算结果与从各传感器获取的数据时间上的一致性,因此将数据采集、计算和通讯的任务均放在中断程序中进行。
从软件流程上分析,软件部分主要包括了空气密度测量系统主程序流程图设计和各功能函数编写。下面从这两方面具体介绍软件部分的设计内容。
空气密度测量系统的主程序流程如下:当系统上电后,首先进行主函数初始化和数据初始化,延时1 s后,通过串口发送指令建立与各传感器之间的通讯,喂狗之后开启各定时器。由于系统数据采集、通讯、计算等任务的实时性要求较高,且这些任务数目并不多,故这些任务均不在主程序循环中进行。
主函数初始化为系统各模块资源的初始化,包括了I/O初始化、定时器的初始化、串口模块初始化、看门狗的初始化等。此部分对应对单片机的各接口及相关寄存器进行配置,本设计借助英飞凌公司提供的Dave软件完成该工作。
数据初始化是对空气密度测量系统内收发值进行初始化。
喂狗函数用于给看门狗模块发送信号。为了防止单片机跑飞,开发者设置了看门狗模块。单片机在运行过程中需要定时给看门狗模块发送信号,否则看门狗模块会自动将单片机复位以防止单片机跑飞。
通讯建立模块是指利用串口向单片机发送启动和信号采集指令,以获得正确的空气参数数据。
中断服务中包括了数据采集模块、空气密度计算模块、显示模块和上位机通讯模块。其中数据采集模块、空气密度计算模块、上位机通讯模块采用500 ms中断触发,显示模块采用1 s中断触发。
数据采集模块通过串口接收传感器的数据,并进行数据解析。
空气密度计算模块利用采集到的数据,根据CIPM-2007公式计算实时的空气密度值。
显示模块利用串口给液晶显示屏发送显示数据。
上位机通讯模块利用串口给PC机发送各传感器的数据和空气密度的测量结果。
3 实验分析
按照设计目标,需要对空气密度测量系统的不确定度进行实验验证,确定其不确定度为10-4量级。公式法测量空气密度的不确定度由采集的传感器数据——温湿度、CO2含量和大气压的不确定度以及公式自身的不确定度决定。根据公式可以推导出该系统不确定度的计算公式为:
(7)

CIPM-2007公式本身的不确定度根据表4的说明,可得uF=22×10-6×ρa。
根据装置中国计量科学研究院对所使用的传感器的校准情况,各不确定度分量如表5。

表4 CIPM-2007公式不确定度估算
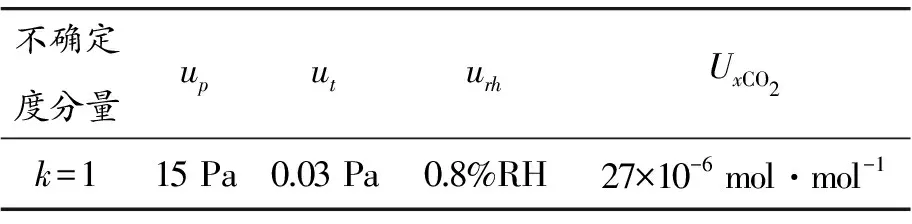
表5 不确定度分量
为了验证本文设计的空气密度测量系统的不确定度要求,本实验分别在2016年7月20和21号2天中午采集了2套空气密度测量数据,实验时每隔1 s采集一次数据,分别采集了10 min数据,其中部分数据如图10、11所示。

图10 第1天部分采集数据

图11 第2天部分采集数据
经过计算得到,当采用CIPM-2007公式计算时,两次实验的相对合成不确定分别为4.0×10-4和4.1×10-4,满足本文的设计要求。
4 结束语
我国大部分计量机构都配备了水银温度计、汞气压计和通风式干湿球湿度计测量温度、气压和湿度这3个参数,再计算空气密度。而在日常工作中,人工读取上述设备会不可避免地产生较大的示值误差,且操作不方便,影响了测量准确度。且由于汞具有一定的毒性,长期在实验室中使用将会给环境和工作人员造成伤害,给空气密度的测量带来危险性和工作的复杂性,大大降低了工作效率,提高了劳动强度。自主研发的空气密度测量系统可以很好地解决上述问题,具有广泛的社会效益。
同时,本文中空气密度测量系统的研制及使用提升了我国现有的空气密度测量技术手段,为提升质量量值传递的精确度奠定了坚实的基础。
[1]柳建明,丁京安.质量计量基准的建、现状及发展[J].物理通报,2002,(2):1-2.
[2]CN-JJG.JJG 99—2006,砝码鉴定规程[S].北京:中国计量出版社,2006.
[3]OIML.R 111-1:2004,Weights of classesE1,E2,F1,F2,M1,M1-2,M2-3,andM3Metrological and technical requirements[S].France:OIML,2004.
[4]白雪飞,彭和,罗红品.基于 zigbee 的旋耕机扭矩无线远程检测系统研究[J].西南大学学报(自然科学版),2015(10):162-166.
[5]郑太雄,李洪芳,李永福.基于参数自适应滑模观测器的发动机气缸压力估计[J].重庆邮电大学学报(自然科学版),2015,27(1):137-142.
[6]GIACOMO P.Equation for the determination of the density of moist air (1981)[J].Metrologia,1982,18:33-40.
[7]DAVIS R S.Equation for the determination of the density of moist air (1981/91)[J].Metrologia,1992,29;67-70.
[8]PICARD A,DAVIS R S,GLASER M,et al.Revised formula for the density of moist air (CIPM-2007)[J].Metrologia,2008,45:149-155.
[9]PARK S Y,KIM J S,LEE J B,et al.A redetermination of the content of air for buoyancy corrections in mass standard comparisons[J].Metrologia,2004,41:387-395.
[10]SUTOUR C,STUMPF C,KOSINSKI J P,et al.Deternimation of the concentration in ambient fry air for calculation of air density[J].Metrologia,2007,44:448-452.
[11]MOHR P J,TAYLOR B N.CODATA recommended values of the fundamental physical constants 2002[J].Rev.Mod.Phys,2005,77:1-107.
[12]HARVEY A H,LEMMON E W.Correlation for the second virial coefficient of water[J].Physical and Chemical Reference Data,2004,33(1):369-376.
[13]HARVEY A H,HUANG P H.First-principles calculation of the air-water second virial coefficient[J].Int H thermophys,2007,28(2):556-565.
(责任编辑杨文青)
High Precision Air Density Measurement System
WANG Xu, HUANG Yong, TIAN Guang-yu, ZHANG Xin-long
(The State Key Laboratory of Electric Vehicle, Tsinghua University, Beijing 100084, China)
In order to revise the impact of air buoyancy on the results of high precision calculation involving weight, the paper used the method called Formula-Method to achieve the goal of high precision measurement of air density by measuring temperature, humidity, pressure, and concentration of CO2of surrounding area and provide air parameters needed in air buoyancy correction.
Formula-Method; air density; air parameter; high precision measurement
2016-08-24
国家重大科学仪器设备开发专项(2012YQ09020806)
王旭(1993—),男,江苏人,硕士研究生,主要从事插电式混动汽车能量管理策略研究,E-mail:wangxu15@mails.tsinghua.edu.cn;通讯作者:田光宇,男,教授,博士生导师,主要从事电池系统应用技术、电动汽车整车集成与控制研究,E-mail:tian_gy@tsinghua.edu.cn。
format:WANG Xu, HUANG Yong, TIAN Guang-yu, et al.High Precision Air Density Measurement System[J].Journal of Chongqing University of Technology(Natural Science),2016(10):40-48.
10.3969/j.issn.1674-8425(z).2016.10.006
TP274+.2
A
1674-8425(2016)10-0040-09
引用格式:王旭,黄勇,田光宇,等.高精度空气密度测量系统设计[J].重庆理工大学学报(自然科学),2016(10):40-48.