基于STM32单片机测风系统的设计
2016-11-17陈志洲刘小河田雨聪
陈志洲刘小河田雨聪
(1.北京信息科技大学自动化学院,北京 100192;2.北京国电智深控制技术有限公司,北京 100085)
基于STM32单片机测风系统的设计
陈志洲1刘小河1田雨聪2
(1.北京信息科技大学自动化学院,北京 100192;2.北京国电智深控制技术有限公司,北京 100085)
随着风能大范围的的利用,提高风能的利用率成为研究的重点,而风速风向的准确性对风能的利用起到了关键性的作用。在周围环境较恶劣的地方,超声波测风装置和其他测风方法比较,可以得到较高的测量风能精度,因此它得到了广泛的应用。文中详细介绍了测风的研究方法和超声波测风系统的电路设计。通过实验证明,该设计可以满足工业的设计要求。
测风装置;超声波传感器;驱动电路;STM32
传统的机械式测风装置一般是通过旋转某个机械部件来测量风的特性,由于其长期进行机械运动,在大风和雨雪的恶劣自然环境中容易受到腐蚀而导致测量精度的降低,甚至造成损坏,且维护费用高,同时由于存在机械运动将会导致其有一个相对比较大的起动下限值(起动风速)。超声波测风装置以MCU为控制核心,搭配相应的外围电路,能够可靠的测量出风的矢量,并且体积较小,抗外界干扰强,具有较强的使用寿命,无起动风速[1]。本文介绍了时差法测风的基本原理和电路设计,包括驱动电路、切换电路和信号处理,最终得到风速的矢量信息。
1 超声波测风方法
目前国内相对使用较多的超声波测量风矢量的方法有:涡街法、多普勒法和时差法。
1.1 涡街法
涡街法是基于卡门涡街原理,即在流动的流体(空气)中放置一根轴线与流向垂直的非流线型组流体,当流体(空气)沿涡街发生体绕流时,会在涡街发生体下游产生两列不对称但有规律的交替涡列,这就是卡门涡街。
通过实验验证,在一定的雷诺数Re范围内,涡街产生的频率f与流体平均流速U之间存在一定的比例关系,即

式中,U表示流体的平均流速,m/s;Sr表示斯特劳哈尔数[2]。
测出涡街产生的频率,通过式(1)可测得风速U。但是其上限流速受到介质可压缩性的限制,下限流速受雷诺数和传感器灵敏度的限制,所以其适用于管道流速的测量。
1.2 多普勒测风法
多普勒法是利用光学多普勒原理,多普勒效应即当发射器和接收器之间有相对运动时,接收器的接收声频率与发射器的产生频率之差与两者之间的相对速度成正比。当测量时,超声波信号的多普勒频移为

式中,Δf表示多普勒频移; fr表示发射信号频率;表示接受信号频率;θ表示入射角;C表示超声波信号的传播速度;V表示气体流速。
由式(2)可知,气体流速与超声波的传播速度成正比,而超声波的传播速度应该考虑外界环境的影响,所以其应用在测量风速有一定的局限性。
1.3 时差法测风法
时差法是根据超声波传感器发出的信号通过计算正向传播时间和反向传播时间之差来求得风速,根据不同方向的风速确定风向[3-4]。本设计在东南西北四个风向各放置一个收发一体的超声波探头,通过切换装置对其进行控制。时差测风法的原理如图1所示。

图1 时差法原理图
顺风时:

逆风时:

将两个超声波探头的距离固定为 L,则可以测出其在顺风方向的传播时间为

逆风传播时间为

当测得TBA与TAB时,则可以得到风速,即

风向:设定正东方向为正方向,西东方向的传播时间为t1,东西方向的传播时间为t2,南北方向的传播时间为t3,北南方向的传播时间为t4,即

通过对三种测风方法的比较,选用可靠性强,且测量精度高的时差法来对风矢量进行测量。
2 硬件电路的设计
超声波测风系统的总体设计包括核心控制器MCU、超声波探头的驱动电路、切换电路、接收信号处理电路、模拟量输出电路、温度和气压测量电路等,测量系统的硬件结构如图2所示。

图2 硬件结构框图
2.1 STM32单片机的简介
本设计采用的是 STM32F051R8T6单片机作为核心处理器。STM32F051R8T6采用高性能的ARM Cortex-M0的32位的RSIC内核,工作于48MHz频率,高速的嵌入式闪存(FLASH最大 64K字节,SRAM最大8K字节),并广泛集成增强型外设和I/O口。所有器件提供标准的通信接口(两个I2Cs,两个SPI,一个I2S,一个HDMI CEC,两个USART),一个12位ADC,一个12位DAC,最多5个16位定时器,一个32位定时器和一个高级控制PWM定时器。
STM32F051单片机采用3.3V电源供电。设计中采用12个I/O端口,一个SPI接口,通信端口和I2C接口,在控制成本的基础上满足了设计的要求。
2.2 电源电路的设计
电源电路采用外加 24V电源供电,并通过WRB2405芯片和 ASM1117,分别得到正负 5V和3.3V电压。在图3和图4中,D1用于防止外部电源接反而造成对电路的破坏,C1、C2、C3、C4用于滤波。

图3 24V转5V

图4 5V转3.3V
2.3 超声波探头的驱动电路
超声波探头的驱动是硬件系统的关键,驱动能力直接影响超声波换能器发射超声波的质量,继而影响测量精度。本设计采用频率为200kHz的PWM波作为激励信号,通过传统的图腾柱结构来控制MOS管的开关。由于超声波换能器需要较高的激励电压,故采用高频变压器进行升压。在图5中,当PWM波为低电平时,Q2断开,Q3导通,给MOS管提供开通电压,继而变压器不工作;当PWM波输出为高电平时,Q3导通,Q4导通,Q3断开,MOS管放电,变压器原边提供24V工作电压[5]。Q2和Q3在开关状态时,工作在饱和区。

图5 驱动电路
由于图 5装置需要较快的开关速度,而 MOS管中存在寄生电容会延长开关速度,所以增加 Q4来快速的泄放寄生电容中的电流,以加快MOS管的开关速度;同时在变压器的原边接上二极管,用于加快其放电过程。仿真结果如图6所示,由此看出得到了良好的波形。

图6 驱动电路波形
2.4 切换电路
由于超声波探头采用的是收发一体的,所以切换电路显得尤其重要。本设计采用的是通过单片机的高低电平来控制三极管的开断,通过 TLP285光耦芯片进行隔离设置来保护单片机的接口;由于驱动电压较高,采用了耐压较高的13009三极管;通过 CD4051芯片来对接收信号进行控制,但一般的模拟开关的耐压值比较低,所以加入了钳位电路将电压的幅值限制正负0.7V之间,如图7所示。
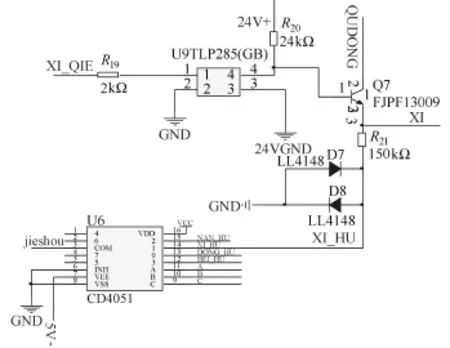
图7 切换电路
2.5 放大电路
超声波探头接收到超声波信号的信号十分微弱,只有毫伏级别,后续电路难以进行比较,因此需要将此微弱信号进行放大[6]。
本设计采用AD8656运放芯片进行放大电路的设计。AD8656芯片是双通道的运放芯片,由于信号十分微弱,所以设计用一级电压跟随的设计,一级进行同相放大。电压跟随器输入阻抗大,而输出阻抗小,起到了隔离缓冲的作用,如果直接进行连接,易造成信号衰减。在后续电路要进行电压比较,所以尽可能的将放大后的电压控制在3.3V左右,所以将对交变信号放大50倍,原理如图8所示,在电源的附近都有一个4.7μf的钽电容和0.1μf的瓷片电容是为了去耦和防止电源自激荡。运放采用的是同相比例放大电路,输出U。C17为了滤除信号中含有较高的直流分量,这样防止运算放大器饱和。

图8 放大电路原理图
由图9可见,放大出来的效果是十分理想的。

图9 信号放大前后对比图
2.6 滤波电路
本设计采用的输入信号的频率为200kHz,所以我们应该将接收到的信号中除了 200kHz以外的无用信号进行过滤,以免对后续电路进行干扰,影响测量的精度。本人采用的是美信公司的MAX275芯片,由于其可以根据数据手册上的计算方法来确定各个电阻的阻值,计算相对简单,可以连接成低通滤波器、高通滤波器和带通滤波器等。运用两个二阶滤波器级联构成四阶带通滤波器,中心频率为200kHz,带宽为20kHz。设计原理图如图10所示。
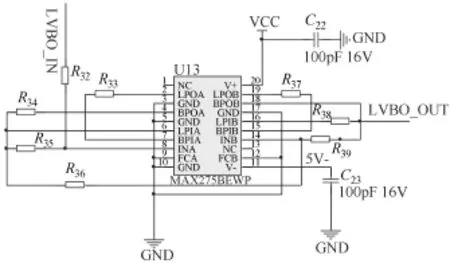
图10 带通滤波器
2.7 电平比较电路
经过以上的相关处理后,所得到的是交变的模拟信号,仍然不能将其送入单片机内进行数字处理。所以,在信号处理过程中,并不用将全部信号转变成数字信号,只是选取一个时间的截点,所以可以采用电压比较电路。本设计采用的是专业的比较器芯片LM193,切换速度快,延迟低。由于其是集电极开路输出,在输出端应该接上拉电阻。原理如图11所示。
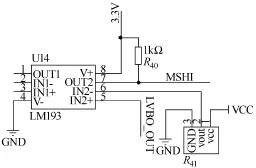
图11 电压比较电路
采用专业的电压比较器芯片LM193,取跃变信号的终点作为计时截止时间。由于存在噪声的影响,阈值不能设定为零,为此用一个电位计来调节阈值电压,此阈值电压需要在实验过程中反复的调节实验,来达到最好的检测效果。R41为可调电位计,可为在调试过程中提供不同的阈值。通过比较器将模拟信号转化为高低电平,通过单片机的识别,进行中断响应。仿真实验图如图12所示,仿真效果比较理想。

图12 电平比较电路仿真图
2.8 外围功能电路设计
由于测风装置安装在室外,会受到恶劣的自然环境的影响,所以本设计加入了测温装置[7]和测气压装置,在一定的条件下起动加热装置,为测风装置长久稳定的运行提供了保障同时扩展了测风装置的功能[8]。本设计采用气压传感器 BMP085芯片,此芯片既可以测量气压也可以测量温度,采用 I2C协议通信。经过试验测试,满足设计的要求。原理如图13所示。

图13 气压传感器
2.9 模拟量输出的设计
本设计采用模拟量输出方式,电流输出在 4~20mA,电压输出在0~5V。设计中采用AD5422芯片来作为转化成模拟量。
AD5422是低成本、精密、完全集成、12/16位数模转换器,内置可编程电流源和可编程电压输出,输出电流范围可编程设置为4~20mA、0~20mA。灵活的串行接口为SPI和MICROWIRE兼容型,可以采用三线式模式工作,从而极大的降低隔离应用和数字隔离要求,该器件含有一个异步清零引脚,它可将输出设置为零电平/中间电平电压输出或将输出设置为选定电流范围的地端,满足于工业过程控制应用的需要。具体电路图如图14所示。

图14 AD5422连接图
2.10 通信模块的设计
测风装置除了采用模拟量输出的方式,还采用RS-485通信的形式,将所测数据与上位机进行通信。
1)RS-485的电气特性:采用差分信号负逻辑,逻辑“1”以两线间的电压差为+(2~6)V表示;逻辑“0”以两线间的电压差为-(2~6)V表示。接口信号电平比RS-232-C降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL电路连接。
2)RS-485的数据最高传输速率为10Mbps。
3)RS-485接口是采用平衡驱动器和差分接收器的组合,抗共模干扰能力增强,即抗噪声干扰性好。
设计电路如图15所示。

图15 RS-485通信电路
3 结论
本文对超声波测风装置的测风原理和硬件设计进行了详细的介绍,整体设计电路简单,易于调试,抗外界环境能力强。由对各个模块的仿真分析可知,各个模块可以实现其应有的设计功能,能够满足其工业上的设计要求。由于时间的有限,还没有进行各个部分的联调,后期主要完成主干程序的编程工作,进行实地进行测量。
本设计限于客观条件的限制,完成了测量风速的基本功能,在某些方面存在不足。在以后的设计改进中,可以从以下几个方面进行改进:
1)可以采用运算速度更高的 DSP芯片来取代单片机。
2)在阈值时间的检测方法上,可以采用更精确的算法,比如互相关算法等来提高测量时间的精确度。
3)增加外围功能器件,来增强测风仪的功能,如增加测量湿度的芯片等。
[1]沈广平,吴剑,张骅,等.一种基于MEMS工艺的二维风速传感器的设计[J].半导体学报,2007,28(11):1830-1835.
[2]朱徐立.超声波涡街风速计的研究及理论分析[D].厦门:厦门大学,2008.
[3]王斌斌,陈玉林,张超,等.基于时差法的超声波测速向仪设计与实现[J].大学物理实验,2013,26(4):21-26.
[4]马晓明.超声波检测风速风向的三种方法[J].电子世界,2014(6):225-226.
[5]于洋,石佳,陈亮,等.基于C8051F120的高精度全天候超声测风仪的设计[J].传感技术学报,2012,25(11):1623-1626.
[6]李志刚,齐贤伟,张延成.基于FPGA的超声波传感器前端电路设计[J].电子设计工程,2013,21(21):133-136.
[7]田胜军,秦宣云,何永强.基于超声波测距系统的温度补偿电路设计[J].微计算机信息,2007,23(5):307-309.
[8]Miguel Perez del Valle,Jose Antonio Urbano Castelan Yasuhiro Matsumoto,Raul Cortes Mateos.Low Cost Ultrasonic Anemometer[J].Electrical and Electronics Engineering,2007.ICEEE 2007.4th International Conference on.2007:213-216.
The Design of STM32 System based on Mcu Windfinding
Chen Zhizhou1Liu Xiaohe1Tian Yucong2
(1.College of Auto,Mation,College of Automation,Beijing Information Science and Technology University,Beijing 100192;2.Beijing Guodian Zhishen Control Technology Co.,Ltd,Beijing 100085)
With the use of a wide range of wind energy,to improve the utilization of wind energy has become the focus of the study,and the accuracy of wind speed and direction of wind energy plays a key role.Ultrasonic wind measurement device can adapt to the harsh natural environment and can keep the high precision and widely used.The paper describes in detail the research method and the hardware circuit design of the measuring system of the wind,The experimental results show that the design of each part can meet the requirements of industrial design.
wind measurement device;the ultrasonic sensor;drive circuit;STM32
陈志洲(1990-),男,河北省邯郸市人,硕士研究生,主要从事控制理论与控制工程方面的研究。
