水下五基元空间阵超短基线定位方法
2016-11-17姬红杰王中秋韩宝坤
姬红杰,王中秋,韩宝坤
(1.山东科技大学机械电子工程学院,山东 青岛 266590;2.山东省科学院海洋仪器仪表研究所,山东 青岛 266000)
水下五基元空间阵超短基线定位方法
姬红杰1,王中秋2,韩宝坤1
(1.山东科技大学机械电子工程学院,山东 青岛 266590;2.山东省科学院海洋仪器仪表研究所,山东 青岛 266000)
针对水下目标定位时,单平面定位阵存在随俯仰角变化定向精度变化大的问题,提出了水下五基元空间阵超短基线定位方法。该方法利用五基元空间阵中每个正交三元阵分别确定目标方位,并将各正交三元阵定位结果互相修正作为目标的最后定位结果。仿真分析表明俯仰角在80°~100°范围内,采用五基元空间阵超短基线定位方法,z坐标的定位精度比单基阵定位时明显改善,z坐标的相对误差没有出现突变的现象,目标的定位精度相对提高。
超短基线;五基元空间阵;俯仰角
0 引言
超短基线定位系统因为定位基阵的尺寸小,安装方便,被广泛应用于水下目标定位。近年来,研究更高精度的超短基线定位系统引起了国内外众多学者和科研机构的重视。例如,挪威Kongsberg公司研发的HiPAP500[1],可在俯仰角50°的范围内定位精度优于作用距离的 0.2%;英国Sonardyne公司开发的用于高频段的Scout-USBL[2]产品,在俯仰角60°的范围内定位精度优于作用距离的 0.5%;法国IXSEA公司[3-4]生产的POSIDONIA 6000型超短基线定位系统,当俯仰角在30°范围以内时,定位精度是作用距离的0.5%,俯仰角在30°~60°范围以内时,定位精度是作用距离的1%;国内哈尔滨工程大学研制的“长程超短基线定位系统”可在俯仰角85°的范围内使定位精度达到±5%的斜距[5]。虽然这些研究或产品在某些方面取得了不错的成就,但对比这些成果的俯仰角和定位精度的关系,不难发现,水下目标在基阵中的俯仰角变化时,目标的定位精度随之变化,当目标靠近定位基阵平面即俯仰角接近90°时,超短基线定位系统的定位误差较大。本文针对此问题,提出了水下五基元空间阵超短基线定位方法。
1 五基元空间阵超短基线定位原理
传统平面阵型超短基线定位系统的定位原理是利用收发换能器向水下目标发送询问信号,装有声学应答器的水下目标收到收发换能器的信号后发送不同于询问信号的应答信号,收发换能器通过测量发送信号到接收信号的往返时间来测定目标与收发换能器之间的距离,再通过测量应答信号到达收发换能器基阵各阵元的相位差或时间差来确定目标方位[6]。
以xOy平面内的正交三元阵USBL123为例,假设参考阵元为S2,定位结果为[7]:
(1)
本文采用的五基元空间阵[8]如图1所示,阵元S1、S2、S3、S4和S5为五个声压换能器。以S1、S3和S2、S4连线的交点为坐标原点,阵元间距为d,S1、S2、S3和S4呈正方形,阵元S5位于坐标原点的正上方。
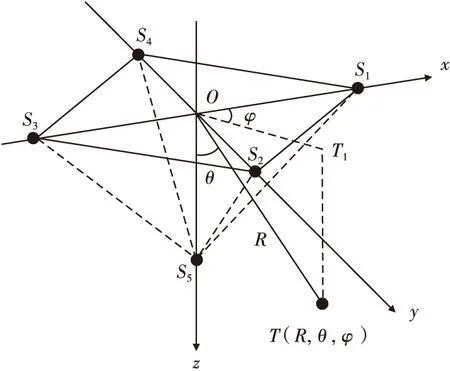
图1 五基元空间阵定位示意图Fig.1 Schematic diagram of five-element arrays
设目标声源的球坐标为T(R,θ,φ),即目标T到坐标原点的距离为R,俯仰角为θ,水平方位角为φ。当目标声源T到基阵的距离远大于阵元间距d时,可以假设基阵接收的信号是平面波信号。
以S1为参考阵元,设声源信号到达S1的时间为t1,到达阵元S2、S3、S4、S5相对于到达S1的时间延迟分别为τ21、τ31、τ41和τ51,则声源信号传播到S2、S3、S4、S5与传播到S1的声程差分别为d21、d31、d41和d51[9]:d21=τ21·c,d31=τ31·c,d41=τ41·c,d51=τ51·c,c为声音在水中的传播速度。
设目标T相对于基阵坐标原点的单位向量为T,则:
T=isin θcos φ+jsin θsin φ+kcos θ
(2)

由于采用了远场平面波假设,阵元S1为参考阵元,则目标到阵元S2、S3、 S4和S5的声程差为:
(3)
(4)
(5)
(6)
五基元空间阵超短基线定位系统是利用水平面内的USBL123、USBL234、USBL341、USBL412和正交三元阵USBL135、USBL245分别确定目标方位,然后通过坐标转换将定位结果转换到参考坐标系中。俯仰角变化到目标靠近各定位基阵平面时,通过改变各基阵定位结果在目标定位结果中所占的权重来解决定位精度变化大的问题。
2 俯仰角对定位精度的影响
当目标靠近定位基阵平面时,定位精度突然恶化。俯仰角为哪个范围时认为目标靠近定位基阵平面,则需要通过分析俯仰角对定位精度的影响来确定。
预设水平方位角为45°,俯仰角在0°~180°范围内变化。单一基阵定位时,x坐标相对误差(y与x相对误差变化趋势相同)如图2所示。图3为单一基阵定位时,z坐标相对误差变化。
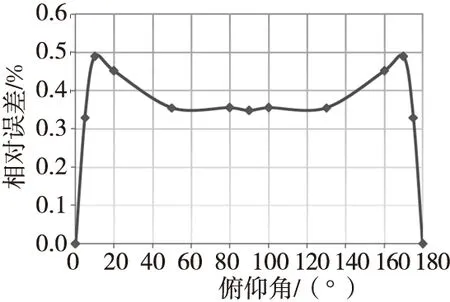
图2 x坐标的相对误差图Fig.2 Relative error figure of x coordinate

图3 z坐标的相对误差图Fig.3 Relative error figure of z coordinate
从图2中可以看出x坐标相对误差受俯仰角的影响变化不大;图3中z坐标相对误差在俯仰角为80°~100°范围内急剧增大。对比图2和图3可看出x、z坐标相对误差变化均关于俯仰角为90°对称;俯仰角变化时,主要是z坐标测量误差导致基阵的定位误差发生急剧变化。
3 五基元空间阵定位仿真分析
假设目标是位于可以近似为平面波的位置,传播介质均匀且不存在多径干扰,斜距测量精确。仿真中水平方位角φ=45°,俯仰角在0°~90°变化,目标到坐标原点的距离为R=500m,信噪比为10dB,仿真过程中仅考虑时延误差的影响,本文采用相对误差的均值代表定位精度。
目标模拟过程中,假设背景干扰噪声为高斯白噪声,接收阵的尺寸为d=0.08m,目标发射信号为长度5ms的线性调频信号,中心频率为fc=13.5kHz,频带宽度为B=3kHz,采样频率fs=2MHz,声速c=1 500m/s,阵元间的时延根据目标与各阵元声程差反向推导添加到各阵元接收信号中。
仿真结果如图4所示,图中分别为上述条件下正交三元阵USBL123和五基元空间阵的定位误差随俯仰角变化的趋势。
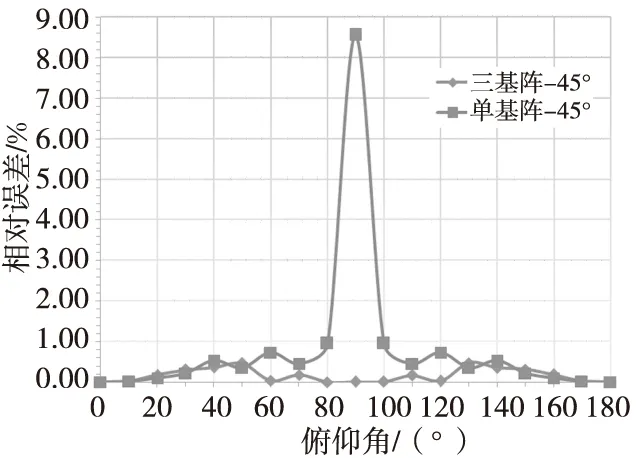
图4 z坐标的相对误差图Fig.4 Relative error figure of z coordinate
对比两条曲线可以看出俯仰角在80°~100°范围内,采用五基元空间阵定位时,z坐标的定位精度比单基阵定位时明显改善,z坐标的相对误差没有出现突变的现象,目标的定位精度相对提高。
4 结论
本文提出了水下五基元空间阵超短基线定位方法。该方法利用五基元空间阵中每个正交三元阵分别确定目标方位,并将各正交三元阵定位结果互相修正作为目标的最后定位结果。仿真分析表明,俯仰角在80°~100°范围内,采用五基元空间阵超短基线定位方法,z坐标的定位精度比单基阵定位时明显改善,z坐标的相对误差没有出现突变的现象,目标的定位精度相对提高。
[1]HIPAP500HighPrecisionAcousticPositioningSystem[EB/OL].[2016-03-27].http://www.kongsberg.com.
[2]VincentRicordel,SebastienParis.TrajectoryEstimationforUltra-shortBaselineAcousticPositioningSystems[J].IEEEProceedings, 2001, 14(4):1791-1796.
[3]NewsOceano[EB/OL].[2016-3-27].http://www.ixsea-oceano.com/news/20020125.html
[4]Posidonia-TransPonderUser’sManual[EB/OL].[2016-03-27]http://www.oceano.co.uk/tech-info.
[5]张晓亮. 长程超短基线定位系统信号处理算法仿真及软件设计[D]. 哈尔滨:哈尔滨工程大学水声工程学院, 2004.[6]冯守珍, 吴永亭, 唐秋华. 超短基线声学定位原理及其应用[J].海岸工程, 2002, 21(4):13-18.
[7]郑翠娥. 超短基线定位技术在水下潜器对接中的应用研究[D]. 哈尔滨:哈尔滨工程大学水声工程学院, 2008.
[8]Mikhail Arkhipov. Designing a USBL System Based on a Square Pyramid Array with a Complete Set of Three-Element Arrays[C]// Mexico:IEEE Xplore, 2012.
[9]何轲, 张效民, 韩鹏,等. 一种四元非典型阵水下超短基线声定位方法[J]. 探测与控制学报, 2008, 30(2):13-17.
Ultra-short Baseline Localization Using Five-Element Arrays
JI Hongjie1,WANG Zhongqiu2,HAN Baokun1
(1.College of Mechanical and Electronic Engineering, Shandong University of Science and Technology, Qingdao 266590, China;2.Shandong Institute of Marine Instruments and Meters, Qingdao 266000, China)
Based on the orientation variety within wide limits as pitch angle change in single plane for acoustic localization, an approach of ultra-short baseline localization using five-element arrays was proposed. In this method, the every orthogonal ternary array in the five-element space arrayswas used to determine target range, and the localization results of every three orthogonal array element were correctted by each other to get the final positioning result. Simulation results showed that when the pitch angle was between 80deg and 100deg, by using the five-element spatial arrays of ultra-short baseline positioning method, the Z coordinate of the positioning accuracy was improved obviously than that of single array positioning, target localization accuracy was relatively increased.
ultra-short baseline;five-element arrays;pitch angle
2016-03-27
姬红杰(1988—),女,山东泰安人,硕士研究生,研究方向:系统振动与噪声控制。E-mail:sunnyjhj@sina.com。
TJ43
A
1008-1194(2016)05-0049-03
