增量PID算法在某风洞压力控制中的应用改进
2016-11-17云长江
田 昊,云长江,彭 毅
(中国空气动力研究与发展中心低速所,四川 绵阳 621000)
增量PID算法在某风洞压力控制中的应用改进
田 昊,云长江,彭 毅
(中国空气动力研究与发展中心低速所,四川 绵阳 621000)
为解决风洞高度模拟控制系统对风洞总压有效控制的问题,根据系统特点,选取了定水环泵转速,利用增量PID控制算法调节补气调节阀开度的控制策略;针对直接采用增量PID控制算法,风洞总压振荡时间长,无法满足试验要求的问题;分析了影响控制效果的原因,根据整个系统的大惯性、大滞后特性提出了在增量PID控制的基础上采用超前调节的解决措施,并研究确定了进行超前调节的时机和调节方法,最后按照该方法进行了常用压力控制点的系统调试;调试结果表明:在不超过300 s的调节过渡时间内总压能稳定至性能指标要求的±100 Pa精度范围,满足了试验要求,证明了该控制方法的可行性;该超前调节措施在为风洞总压控制提供了有效方法的同时,也为类似大惯性、大滞后特性系统的精确、稳定控制提供了参考。
风洞;高度模拟;增量PID;压力控制;超前调节
0 引言
风洞高度模拟系统主要利用真空泵吸取风洞内大气,降低风洞内气压,使风洞稳定段总压达到预设海拔高度对应的压力值[1]。并将总压维持在一定的压力范围内,满足风洞试验对海拔高度模拟的需要。
1 系统组成及控制原理
高度模拟系统主要由水环泵和罗茨泵组成的真空泵机组、管路阀门及相应的控制装置组成,风洞回路与系统管路设备分布如图1所示。

图1 风洞回路与系统管路设备分布示意图
将风洞看作一密闭的压力容器,在不考虑其余系统对风洞压力影响的情况下,风洞压力主要由3个因素决定:泵组吸气量(Q吸)、风洞漏气量(Q漏)和补气阀补气量(Q补)。相互间关系如下:
1)Q吸=Q漏+Q补,此时风洞进气流量和吸气流量保持平衡,风洞内压力保持稳定;
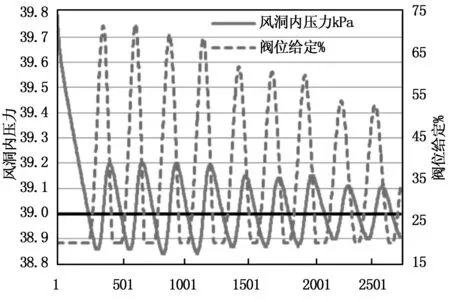
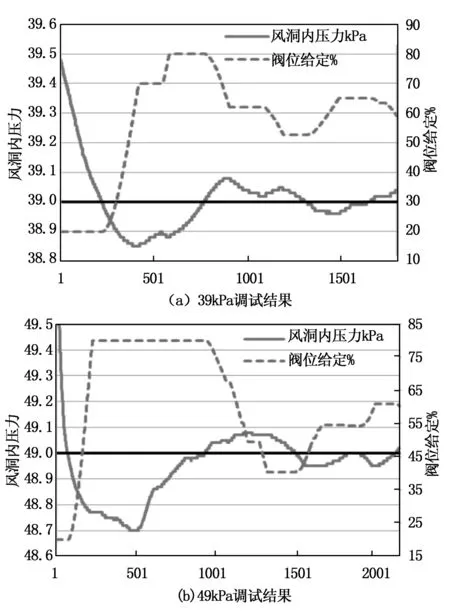
2)Q吸 3)Q吸>Q漏+Q补,此时风洞进气流量小于吸气流量,风洞内压力将降低。 在这3个量中,Q漏是风洞固有特性,随风洞当前压力不同而变化,无法随意改变;Q吸虽可通过改变水环泵转速调节,但转速变化对吸气能力影响较明显,容易造成洞内压力频繁大振幅波动。因此风洞总压控制采取定水环泵转速,利用调节补气阀阀位改变Q补满足Q补=Q吸-Q漏从而实现总压稳定。 控制结构如图2所示。 图2 高度模拟系统压力控制结构图 为适应从常压~39 kPa压力变化范围及不同工况下不同漏气率的压力调节,配置了4种通径的电动调节补气阀:DN200、DN150、DN80和DN25。通过单独或组合使用可分别满足多种工况下的补气量的要求。 2.1 预置调节阀开度 由于选取的补气阀行程较长,阀位行程运动时间长,加减速过程相对缓慢。且阀门补气流量达到某个阀位的对应流量有一个滞后过程。为了缩短补气阀流量达到目标值的滞后时间,在调节开始前,使补气阀开度处于某一个预置开度,补气阀阀位从预置位置开始进行调节,以保证补气流量能快速接近目标值。 通过前面的分析,只要测得预控压力点的水环泵吸气流量和风洞的漏气流量,即可得到需要的补气流量。通过相关的计算公式[2]和阀门的流量系数计算出给定阀位就能从理论上满足风洞进、出气量的平衡,从而实现压力稳定。但实际试验过程中泵的吸气流量、风洞漏气流量分别受水温[3]、风洞风扇转速等多种因素影响而不断变化,无法预先得到准确的补气流量。不过可根据该方法通过在试验前测定预定工况下的相关数据并根据试验过程中相关工况参数可能的变化范围确定采用何种通径的补气阀以及补气阀的预置开度。 2.2 控制算法选取 由于调节阀预置开度,因此调节器只需计算出预置开度基础上的开度变化量,即调节增量。所以应采用增量PID控制算法计算阀门开度增量。 增量PID控制算法为: Δu(k)=Kp×(ek-ek-1)+ek×Ts/Ti+ Td*(ek-2×ek-1+ek-2)/Ts (1) 式中,△u(k)为第k次控制输出的增量,ek、ek-1、ek-2分别为第k次、k-1次和k-2次压力偏差量,Kp为比例系数,Ts为调节周期,Ti为积分时间,Td为微分时间。相较于普通PID调节,增量PID控制算法计算输出增量仅与最近3次的误差值有关不需要做重复累加计算,减少了运算量;由于输出增量,所以误动作时影响很小,容易得到比较好的控制效果[4]。 当输出增量时应注意,由于阀门运动速度的限制以及加减速过程,在一个调节周期内的增量输出应略小于被选定作为调节阀的阀门在该段时间内的行程范围,即:△u(k) 2.3 初期控制策略调试结果 在实际试验中,遵照以上控制策略,在几个试验压力点进行测试,其中39 kPa测试结果如图3所示,其余压力点测试结果与其类似。 图3 初期控制策略39 kPa调试结果 从结果可以看出,虽然压力最终能达到39 kPa±100 Pa范围内(要求指标设定压力点±100 Pa范围),但压力始终处于振荡状态,从调节阀开始作用到最后压力达到稳定范围,需经过7~8次振荡(横坐标单点间隔0.5 s,总计约1 000 s)。虽然通过调整优化参数,收敛速度有所增加,过渡过程时间减少,但效果并不明显,无法满足试验要求。 2.4 问题分析 在整个系统中压力判定以风洞总压为依据,总压测量位于风洞稳定段,而补/吸气管路距该处较远,风洞补/吸气的变化需经过约50 m的管路和沿风洞气流方向经过约140 m风洞回路才能反映到稳定段压力上,可参考图1风洞回路与补/吸气管路设备分布图。且主管路直径为700 mm,最大补气阀门通径为200 mm,而整个风洞容积共12 000 m3,补/吸气必须经过一定时间产生较大的气量变化才能对风洞压力造成影响[3]。综上所述,阀位变化引起的补气量的变化,必将经过较长时间才能反映到稳定段压力变化上。 因此整个系统相当于纯滞后环节与一阶惯性环节的组合,按照常规的运算调节方式,必然出现总压振幅大、收敛时间长,压力长时间无法稳定的情况。 由于系统的大惯性特性造成的压力反应严重滞后于阀门动作,因此必须结合超前的调节措施控制阀门增量,改善系统的动态特性,但需确定进行超前调节的时机及具体方法。 3.1 超前调节时机的确定 将一个压力变化周期内压力变化简化为一条正弦曲线,如图4所示。其中在A阶段,压力变化反映为背离设定值增加,按照正常调节运算,结果是减小补气阀开度,减少补气量,逐渐满足Q补 图4 一个压力变化周期内压力变化图 在B阶段,压力变化反映为朝向设定值减小,按照正常调节运算,结果是继续减小补气阀开度,减少补气量。由于整个系统的压力反应严重滞后于阀门动作,其实当由A向B转换时,即在压力由背离设定值增加到朝向设定值减小的拐点上,阀门在减小至当前开度之前已经满足压力向接近设定压力减小的开度条件(即Q补 由于压力变化的大滞后,超前调节应尽早介入。应该在A阶段阀位满足Q补≤Q吸-Q漏条件时开始超前调节。但由于Q吸、Q漏在试验过程中受影响的因素较多,难以准确算出,且不易实时测得,因此无法找到不同工况条件下在A阶段满足该条件的阀门开度,即无法确定在A阶段进行超前调节的时机,C阶段情况类似。 当A阶段结束,在A向B转换时,通过前面的分析,可以肯定此时阀门开度已经满足Q补 3.2 超前调节方法的确定 在B阶段,Q补 第一种方法,在B与D阶段增量调节输出应尽量与ek-ek-1保持同号,相当于增大比例分量的作用,减小积分分量的作用。由于一般情况下ek-ek-1≪ek,因此按照公式(1),应调整参数使该阶段Kp≫Ts/Ti。如果当ek-ek-1接近于0,但ek仍然不为0时(即压力几乎保持不变,但反馈压力与给定压力不一致),增量调节将基本按照积分计算结果输出阀位增量,促使压力继续朝给定压力值变化。 第二种方法,在B与D阶段可强制暂停增量调节,使阀位增量输出为0。当出现压力变化为0,而反馈压力与给定压力不一致的情况,此时可正常计算阀位增量,直至压力继续朝给定压力值变化,再强制暂停增量调节。 比较以上两种方法,第一种相较于第二种,由于在压力向设定值变化过程中,阀门提前反方向动作,对压力变化进行了更多的抵消,压力朝向设定值变化速度将更为缓慢、稳定,同时进、出气量能更快达到平衡,但阀门开度在B阶段容易过快满足Q补≥Q吸-Q漏的开度条件,在D阶段容易过快满足Q补≤Q吸-Q漏的开度条件。由于压力变化滞后特性的存在,必将造成阀门出现一定的过调节,可能使压力在未到设定点时就过早背离设定值变化,阀门再次反向动作。如此反复,造成压力围绕偏离设定值的某个压力点多次小振幅振荡;第二种实现简单,虽然压力朝向设定值的变化平缓性、进出气量的平衡速度不如第一种,但不容易出现压力过早背离设定值变化的情况,也不会因为反复增加、减小阀位出现压力围绕偏离设定值的某个压力点小振幅振荡的情况。因此实际采用第二种方法。 在常用39 kPa、49 kPa压力点的调试结果如图5所示。 图5 加入超前调节后调试结果 从结果可以看出, 39 kPa目标压力时从调节阀开始作用到最后压力达到稳定范围,经过一次小幅超调(约150 Pa),约200 s压力达到稳定,稳定后压力波动范围80~-40 Pa。49 kPa目标压力时从调节阀开始作用到最后压力达到稳定范围,经过一次超调(约300 Pa),共约300 s压力达到稳定,压力波动范围80~-50 Pa。对比图3直接采用增量PID控制的调试结果,过渡过程的振荡次数和振荡时间都明显减少,稳定精度也大大提高,达到了试验指标要求。针对超调,今后可考虑在初始调节时,引入第一种超前调节方法来抑制。 通过在增量PID控制算法控制阀门开度的基础上引入超前调节措施,很好地解决了由于整个系统大惯性、大滞后特性造成的总压振幅大、收敛时间长,压力长时间无法稳定的情况,满足了试验控制要求,也为今后类似特性系统的控制提供了参考。后面还可考虑对两种超前调节方法进行结合使用,以进一步提高控制性能。 [1] 刘政崇,等. 3 m×2 m结冰风洞设计总体初步方案[A]. 中国航空学会2007年学术年会[C]. 2007:43. [2] 厉玉鸣,等. 化工仪表及自动化[M]. 北京:化学工业出版社, 1994. [3] 达道安,等. 真空设计手册[M]. 北京:国防工业出版社, 2004. [4] 叶巍翔,等. 用于生化传感检测的自适应增量PID恒温控制系统[J]. 南开大学学报(自然科学版), 2014,30(2): 21. Improving Application of Increment PID Adjust Method For Pressure Control in Wind Tunnel Tian Hao,Yun Changjiang,Peng Yi (China Aerodynamics Research&Development Center, Mianyang 621000, China) To resolve the problem how to control the pressure in Wind Tunnel using the altitude simulation control system. The control strategy chooses keeping the speed of water ring pump and adjusting the valve using the increment PID control arithmetic according to the characters of system. Because of adopting the increment PID control arithmetic directly, the oscillation time is long, that can not satisfy the requirement of experiment. The reason is analysised, the method that adopting advance adjust on the basis of increment PID control according to the delay and inertial of the system is suggested, then the opportunity and method are defined, at last, system debugging is carried out. The result indicates that, the pressure control can stabilize in ±100 Pa range less than 300 s, it can satisy the requirement of experiment, and provide reference for the stabilization control to the delay and inertial of the system. wind tunnel; altitude simulation; increment PID; pressure control;advance adjust 2015-10-27; 2015-11-20。 田 昊(1982-), 男, 四川南充人, 硕士研究生, 工程师, 主要从事风洞测控方向的研究。 1671-4598(2016)03-0064-03 10.16526/j.cnki.11-4762/tp.2016.03.018 TP29 A
2 阀门初期控制策略
3 超前调节措施

4 试验结果与分析
5 小结
