故障诊断中的数据建模与特征选择
2016-11-16武坚安宏勇冯思桐
武坚+安宏勇+冯思桐
摘要:机器学习方法在故障诊断领域得到了广泛的运用,通过对系统数据做出分析,在最快时间内发现异常并立刻做出反应。它的主要目标是设计算法并分析采样数据,使计算机能够实现“自我学习”的过程,进行适合研究对象的特征提取和特征选择,来预测未知数据的可能行为。本文结合现有文献,以传动轴为研究对象,对机械制造业中的故障诊断特征提取与特征选择过程进行了研究。文中列出了零部件故障诊断时域和频域主要使用的故障特征函数,并给出了特征提取与特征选择的流程和方法,使用BP(Back Propagation)神经网络算法进行基于数据的建模分析,结合数据模型,进行了适用于本次评估的特征参数提取和选择。
关键词:故障诊断;数据建模;特征选择
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2016)25-0207-03
1 介绍
基于数据建模的故障诊断,通过对异常的数据点来预测未知的故障情况,通过对故障情况的预估以及定位,可以及时预防并消除安全隐患。这种通过数据采样来进行判断和预测的方法在工业界,尤其是制造业和再制造领域中的需求逐渐上升。机器学习作为人工智能学科的一个分支,主通过对现有数据的归类和整合来建立适用的预测模型,从而对新的未知数据进行分类和预测[1]。在这个过程中原始的数据测量值很大程度上不能反映对象本质,并且很多高维的原始特征计算量大,样本分布稀疏不利于进行建模。因此需要分析各种能够代表研究对象特性的特征,并选出具有代表性的特征,这是整个建模与预测过程中非常关键的一个环节。通过有效特征来降低数据的维度,从而降低建模难度,提升模型的预测精度是进行有效数据建模的重要研究方向。
本文的研究对象为损坏程度由浅至深的传动轴,同时也是机械系统中最容易出现故障并导致事故的部件之一。通过对其转动工作中AE(Acoustic Emission )数据的采集和分析来进行建模,并对不同等级的故障进行预测。由于传动轴在工作过程中难免会受到大量其他部位振动的干扰,因此需要对采集的得到的数据进行合理的信号处理,从含有干扰信号的振动信号中提取有效的失效特征,实现故障的早期监测和评估。文中给出了在传感器技术领域中常用的故障特征,并对采集得到的原始信号进行了小波降噪。通过数据的建模过程最终选择了合适的特征,并给出了使用不同特征进行故障等级预测时的预测精度。
2 基于数据模型的诊断过程与常用特征
2.1 基于数据建模的故障诊断流程
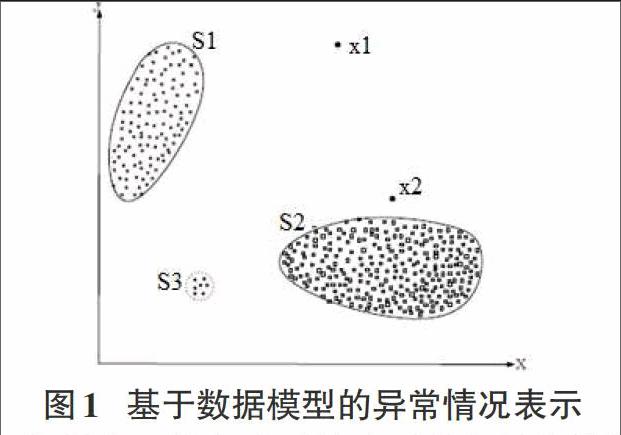
由于机械在运转的过程中将会产生大量的数据,如果单从传统的物理模型出发,无法快速地找出异常情况并做出安全性的评估。故此提出了基于数据的建模方法,在数据挖掘和数据分析的基础上进行安全评估和异常诊断。通常基于传统的行为和经验会给出对于下一步行为的大致预测,异常则定义为与这些预测不符的行为。从概率角度分析,假设表示为正常行为集合的概率密度估计,当一个行为集合概率密度函数时,定义这样的集合为正常行为。如图1所示,S1 和S2 表示正常的行为集合,而其他数据点如x1和x2,其概率密度估计小于假定值,则被定义为异常点,同样的属于S3区域的数据也为异常数据集合[2]。
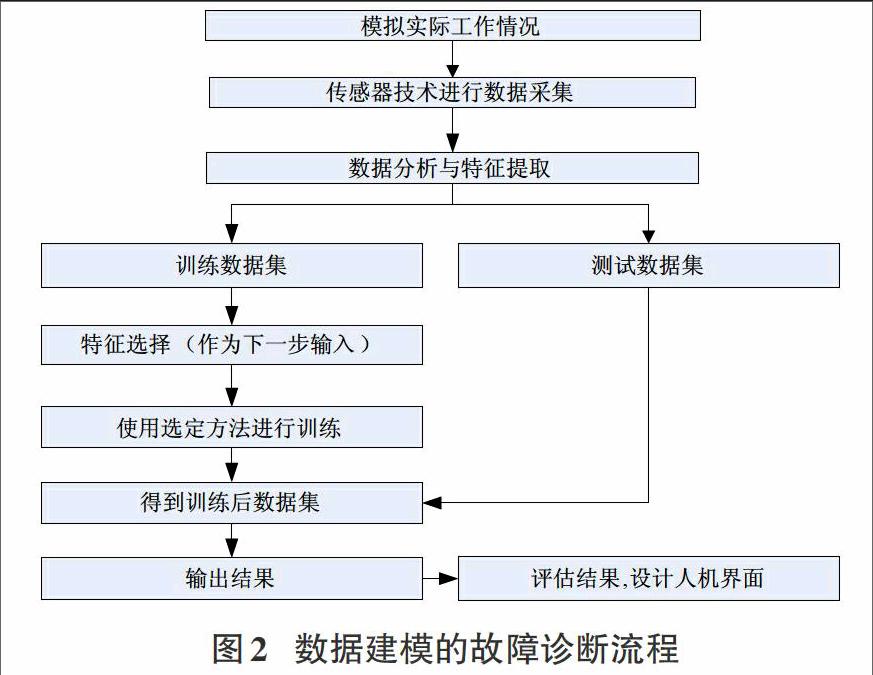
而基于数据的建模方法则是为了从大量的数据集合中找出这些异常的数据流动,从而达到故障诊断的目的。例如使用神经网络或模糊数学的方法来进行建模,通过对正常数据行为的记录和学习,来对总数据集合进行分类,从而得出异常的数据情况[3-4]。通常使用数据模型的安全评估技术应用于实时环境下,可以由数据迅速建立评估模型并且得出结论,图2给出了基于数据的评估模型建立流程。第一个阶段是实验设计阶段,通过相关实验来采集数据。第二个阶段需要对采集到的数据进行处理,通过实验采集得到的原始数据有时无法最好的表达所测物理量的物理特性,需要通过计算转换为具有更好特性的特征参数来进行表达,即特征选择和特征提取的阶段。通过对处理后的数据集合进行分析,可以得到最为有效的特征参数,这样才能保证建模的准确性。第三个阶段为评估模型的建立过程。将第二阶段所得到的特征参数作为模型的输入,对数据进行学习和训练进而产生分类和预测模型,通过测试数据的比较来分析模型的准确性和全面程度,最终得到对于异常情况的分类和预测结果。
2.2 常用的特征参数
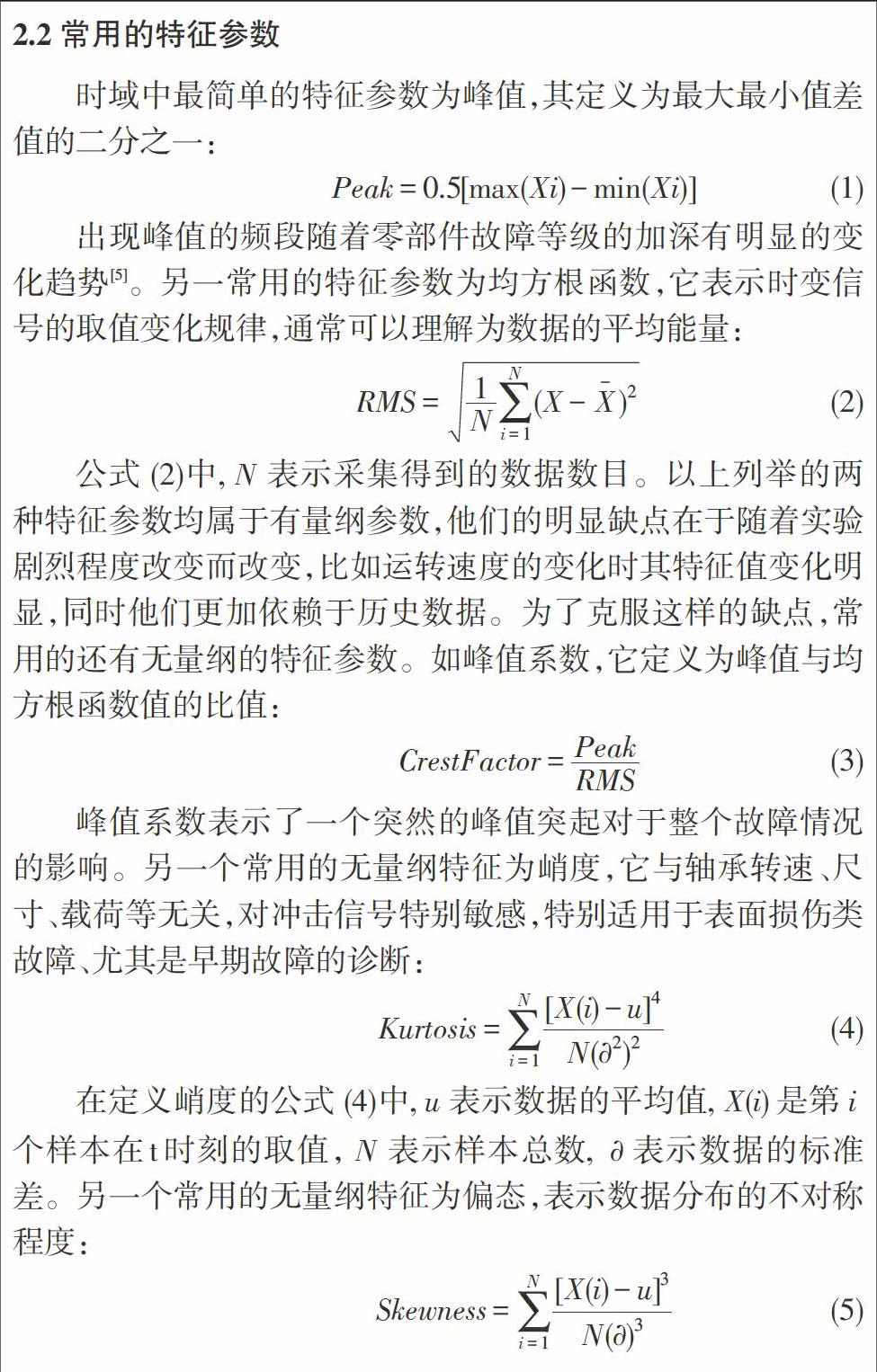
时域中最简单的特征参数为峰值,其定义为最大最小值差值的二分之一:
出现峰值的频段随着零部件故障等级的加深有明显的变化趋势[5]。另一常用的特征参数为均方根函数,它表示时变信号的取值变化规律,通常可以理解为数据的平均能量:
公式 (2)中,表示采集得到的数据数目。以上列举的两种特征参数均属于有量纲参数,他们的明显缺点在于随着实验剧烈程度改变而改变,比如运转速度的变化时其特征值变化明显,同时他们更加依赖于历史数据。为了克服这样的缺点,常用的还有无量纲的特征参数。如峰值系数,它定义为峰值与均方根函数值的比值:
峰值系数表示了一个突然的峰值突起对于整个故障情况的影响。另一个常用的无量纲特征为峭度,它与轴承转速、尺寸、载荷等无关,对冲击信号特别敏感,特别适用于表面损伤类故障、尤其是早期故障的诊断:
在定义峭度的公式 (4)中,表示数据的平均值,是第 个样本在t时刻的取值,表示样本总数, 表示数据的标准差。另一个常用的无量纲特征为偏态,表示数据分布的不对称程度:
3 实验方法
3.1 实验环境
本次实验中将使用11根传动轴,在每根轴上都有一个不同深度的人为切口,用以模拟不同的故障等级。传动轴材料为AISI4140特种钢,常用于石油化工、航空航天、船舶、能源、军工、电子、环保和机械制造等方面。每根轴直径为16mm,长度为53.5cm,其中完好无切口的轴一根,切口深度与故障等级分别为0.8mm(5%),1.6mm(10%), 2.4mm(15%), 3.2mm(20%), 4.0mm(25%), 4.8mm(30%), 5.6mm(35%), 6.4mm(40%), 7.2mm(45%), 8.0mm(50%)。实验中传动轴将会模拟实际的高速运转过程,并在。当传动轴工作时,由于贯轴的横向切口的故障存在,传动轴在运转过程中会产生与正常情况下不同的噪音。AE信号通常用来记录并反应此类实验的动态与静态特性。其中AE传感器主要放置在零部件的四周来采集振动信号,主要记录了零部件工作状况时的能量变化情况。
安装好实验设置平台后,马达装置带动传动轴开始旋转,速度为2000转/分,其旋转时的工作状态以AE数据的形式被传感器记录下来。图3是本次AE数据采集系统的示意图,传感器外接于KISTLER专用的四通道耦合器上,分别为X轴向和Z轴向,将数据传送至模数转换器 A/D converter NI-USB 6259BNC中。最终将数字信号传入PC中的LabView采集界面中,以TDMS的格式保存数据。
3.2 数据预处理
1)数据裁剪
在本次实验中,在采集数据的5分钟内,所采集的并不都是稳定工作下的数据,所以我们首先对数据进行裁剪。机器需要加速至固定速度,并在此速度下先工作一段时间来保证稳定性,所以如图4,我们需要裁剪不稳定的数据,最终保存三分钟的数据。
2)小波降噪
本文对所得信号使用sym8小波进行5层分解,得到高频系数,使用SURE阙值、软阙值对采集到的原始信号进行小波降噪。如图5所示,上图为原始信号,下图为降噪信号,比较发现原始的信号成分与降噪前显得更加明显,信号的信噪比提高,噪声大部分被去除,较好地保持了信号中突变成分的效果。
4 测试结果与实验分析
如表1所列本文一共定义八种特征以供选择,通过使用这八种特征值进行对数据的分类的准确率对比,来选取能够最好表达故障等级的特征向量。
在特征选择的过程中,本文主要通过预测准确性对比的比较方式来选取较好的特征。为了达到最好的对比效果,本文选取2000RPM下0mm(0%)和8mm(50%)两种故障等级的振动信号数据进行对比,通过使用BP神经网络对选取的特征进行分类预测。为了节省运算时间,本次试验将使用20个神经元的神经网络模型来进行预测。对于数据特征值的运算,本文选取每一个旋转周期进行一次运算,从而可以表示每个周期的运动特征。在整个模拟工作的状态的运转过程中,0mm和8mm分别可以选取3630和3336个特征值构成两个带标签的特征向量。本次神经网络的建模中,70%的数据将用于训练,15%和另外的15%将分别用于检测和验证过程。最终得到的检测结果将记录于图6中的混淆矩阵。
对每一个特征向量,随机选取其中的15%进行检测,并进行20次训练和检测来尽量覆盖尽可能多的检测数据,图 6中列出了一次训练后的混淆矩阵,计算最终准确性时将20次训练结果进行平均。如图6,对特征Kurtosis_X来说,训练后检测的准确度为98.7%, 表示测试数据集中518个“0”类样本与513个“1”类样本进行了正确的预测。这样就可以得出其他七个特征向量的预测准确度,记录在表2中:
表2给出了8个特征的预测准确率,通过比较可以看出横轴的特征值能够更好地表达故障情况,而峭度和均方根函数的横轴特征向量均可以达到很高的数据分类准确度。如果选择这样高准确度率的特征参数,就可以建立更加准确的分类器模型。这表明在接下来的故障分类与预测的部分中,可以使用峭度和均方根函数的横轴特征值[Kurtosis_X, RMS_X]作为输入来建立预测模型。
5 总结
本文以传动轴为研究对象设计了工作状态下的AE数据采集试验,并使用BP神经网络建立了数据模型,试验结果证明时域的特征参数可以对传动轴的损坏程度进行一定程度的预测。文中数据建模的方法选取了预测准确率最高的特征向量,可以作为下一步预测模型的输入,以此提高对于未知故障的预测准确率。
参考文献:
[1] Tripolis GR. Supervised Machine Learning: A Review of Classification [J].Techniques Informatica, 2007(31):249-268.
[2] Animesh Patcha, Jung-Min Park. An overview of anomaly detection techniques: Existing solutions and latest technological trends[J]. Computer Networks, 2007(1):355-380.
[3] W. Lee, S.J. Stolfo, K.W. Mok. Adaptive intrusion detection: a data mining approach[J]. Artificial Intelligence Review, 2000(14):533–567.
[4] W. Lee, S. J. Stolfo, K. W. Mok. A data mining framework for building intrusion detection models[C]. In Proceedings of the 1999 IEEE Symposium on Security and Privacy, May 1999:437-456.
[5] El-Wardany, T.I., D. Gao, and M.A. Elbestawi. Tool condition monitoring in drilling using vibration signature analysis[J].International Journal of Machine Tools and Manufacture, 1996,36(6):687-711.
