船舶高压电站短路故障保护算法研究
2016-11-15程真启
程真启
船舶高压电站短路故障保护算法研究
程真启
(南通航运职业技术学院轮机工程系,江苏南通 226010)
对船舶高压电站中的短路故障进行了分析,提出了基于相敏保护的对称性短路保护和基于负序电流的不对称性短路保护方法,并进行了仿真实验。仿真结果表明,这两种故障保护算法具有较高的可靠性和实时性,能够满足船舶高压电站短路故障保护的要求。
船舶高压电站 短路故障 保护算法
0 引言
高压电站在现代船舶上的应用已取得较好的效果,已成为某些特种船舶的首选[1],是船舶电站的一个主要发展方向。短路故障是船舶电站故障中比较常见的一种故障,能直接影响船舶供电的安全性、可靠性和连续性。因此本文对短路故障的保护算法进行讨论,分析其不足之处,然后针对其缺陷,提出基于相敏保护的对称性短路保护和基于负序电流的不对称性短路保护。
1 短路故障分析
目前我国船舶高压电站大多采用小电流接地系统[2],所以对于船舶高压电站来说,短路故障主要有两相间、两相对地及三相短路。对于船舶高压电站短路故障,我们采用对称分量法进行分析。对称分量法是将一组不对称的三相电压相量或三相电流相量分解成三组同频率的对称电压相量或对称电流相量,即正序分量、负序分量和零序分量。对称分量如图1所示。
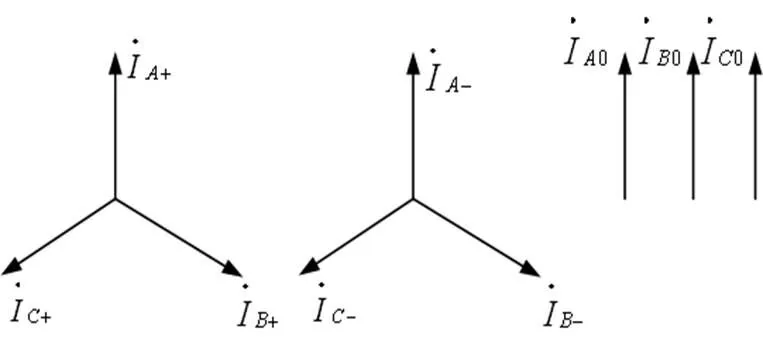
图1 正序、负序、零序电流的对称分量图
图中,A+、B+、C+幅值相等,相位顺时针方向互差120°,称为正序分量;A-、B-、C-幅值相等,相位逆时针方向互差为120°,称为负序分量;A0、B0、C0幅值相等,方向相同,称之为零序分量。若以A相电流为基准相,对称分量的表达式为:
1.1单相接地短路
单相接地短路故障是短路故障中最常见的故障形式之一[4]。此时,系统线电压仍然对称,但是设备的绝缘电压变为正常运行时的倍。假定A相接地短路,则其相电压为0,由对称分量法可得:
因此可以看出,单相接地短路有以下特点:短路故障相中的各序电流大小相等,方向相同,而两个非故障相中的电流均等于零;短路点故障相的电压等于零,而非故障相电压幅值相等。
1.2两相短路
两相短路也是一种常见故障,以B、C两相发生短路故障为例,此时,,,。由式(1)可得:
因此,可知两相短路的具有如下特点:短路电流和电压中不存在零序分量,短路点正序电流和负序电流幅值相等,相位相反;两故障相中短路电流的绝对值总是大小相等,方向相反,数值上为正序电流的倍;短路处两故障相电压总是大小相等,数值上为非故障相电压的一半,两故障相电压相位总是相同,但与非故障相电压方向相反。
1.3两相接地短路
两相接地短路虽然不常见,但也偶有发生。以B、C两相发生接地短路为例,此时,,。
将上式取绝对值,可得短路相故障电流为:
由此可得两相接地短路的特点为:两短路相电流幅值总相等,短路电流远大于正常电流;短路点故障相电压等于零。
1.4三相短路
三相短路是一种常见故障,发生三相短路时,只存在正序电流,不存在负序电流和零序电流。流过各短路相的电流大小相等,且与自身电压相角差相等。短路电流为:
所以三相短路的特点为:三相短路电压均为0;短路电流幅值远远超过正常电流。
2 短路保护原理及算法
由对称性分量法可知,在三相短路时,由于电路是对称的,短路电流周期分量也是对称的,只需分析其中一相就可以了。但是,在系统发生不对称性故障时,电路的对称性将受到破坏,网络中出现了三相不对称电压和电流,因此,可以利用这种不对性电压和电流来判断不对称性故障[5]。
2.1对称性短路保护
在船舶高压电站中,一般三相对称性短路故障是依据电流幅值来整定的:将短路保护电流设定为躲过最大容量电动机起动电流及其它同时运行设备的额定电流之和。这种保护的动作特性如图2所示。图2中,曲线1是大型电动机起动时的起动特性,曲线2和3分别为三相短路不同整定值下的保护特性,a、a’、b、b’、c、c’分别为对应曲线的反时限、定时限和速断保护曲线。由图可见,只要电流超过其整定电流,保护便立即动作,执行机构跳闸。但是电机在启动时电流很大,与线路发生的短路电流相接近,因而使短路电流值的整定十分困难,有的保护装置将短路电流的整定值设定为电动机额定电流的10倍以躲开启动电流,这样当启动电流较大时,不能分辨出是发生三相短路还是电动机正常启动,容易发生误动作。也有些保护装置利用延时几秒钟的方法,以躲开正常启动过程,但当启动过程正好发生短路时,也无法对故障线路做出保护。
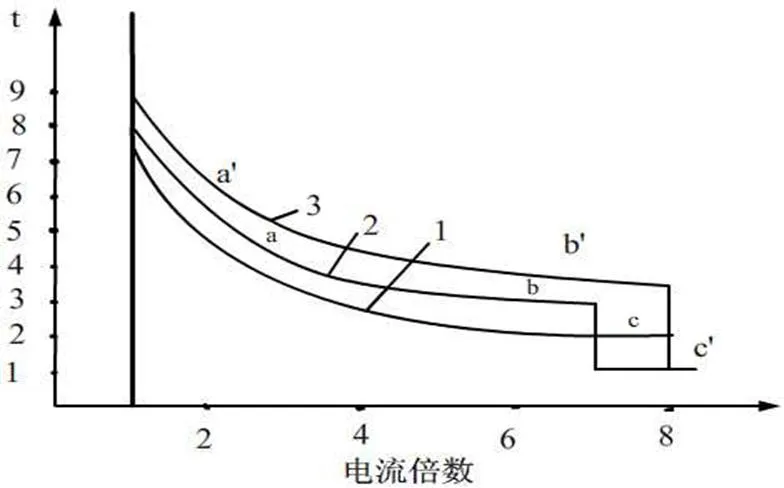
图2 过流保护特性和大电流启动特性
船舶中使用的电动机大多是鼠笼式异步电动机,启动时电流很大,但是功率因数却很低,而当三相短路时,功率因数却很高。因此,如果采用通过判断电流加功率因数的方法,就可以有效地避免单纯依靠电流幅值整定所带来的缺陷。我们把这种保护称之为相敏保护,相敏保护可以使三相短路保护的可靠性得到大大提高。
2.2不对称性短路保护
相敏保护对于两相短路、单相接地等不对称性故障不具有保护特性。由上面的对称分量变换过程可知,当发生不对称性故障时,线路中将存在负序电流,因此可以利用两相短路和单相断相时负序电流的大小来判断不对称性故障。下面将不对称性短路保护的算法分析如下:三相电流之间满足关系:
把上式代入式(1)可得:
由上式可见,把A相电流向前移30°、C相电流向前移90°,再把两个相量相加就可以得到负序电流[6]。设在一个采样周期采样次,将A相电流前移30°相当于在时间轴取后30°的瞬时值,即第N/12采样点的瞬时值作为当前值;同理C相电流前移90°,相当于在时间轴取90°后的瞬时值,即第N/4采样点后的瞬时值为当前值,即可得离散化的负序电流瞬时值:
式中,=(0, 1, …,-1),_()为负序电流的离散采样值,是一个周期内的采样次数。
而我们所要求的负序电流瞬时采样值_()是由两个周期相同的正弦量的瞬时采样值相加所得,因而所得的结果仍为同一周期的正弦量,则根据上式可得:
3 短路故障保护算法的仿真分析
为了验证短路故障保护算法的正确性和灵活性,需要模拟船舶电站的动态变化过程,对算法进行仿真。下面利用Matlab为电力系统仿真提供的SimPowerSystems模块对电力系统进行仿真计算。
3.1故障保护算法的S-函数实现
故障保护算法采用普通的Simulink模块不容易搭建,对此使用Simulink支持的S-函数格式,S-函数可以采用Matlab、C/C++、Fortan等语言编写。但由于实时仿真过程中需要将Simulink模块转化成C代码并生成独立文件,因此,算法必须采用C/C++语言编写的S-函数。由于采用了三相序分量分析元件对正序、负序和零序分量中的电压、电流进行采集,因此算法的C语言实现起来就比较简单。通过将采集到的相序分量与故障保护设定值进行对比,来控制三相断路器的合/分闸,解除故障。
3.2短路保护算法仿真
短路故障仿真模型如图3所示。使用理想三相电压源作为供给电源,电源采用Y型接线类型,线电压设为6000 V,A相初始相角设为0;使用分布式参数输电线路作为传输电路,输电线路Line1的长度为3 km,输电线路Line2的长度为2 km;使用三相电路故障发生器进行不同形式的短路;使用三相序分量分析元件采集故障保护中各序电流、电压分量;使用选择器对各相电压、电流进行有选择的输出;由Substem构建的故障保护元件,实现短路保护算法,由此来控制三相断路器的故障分闸。
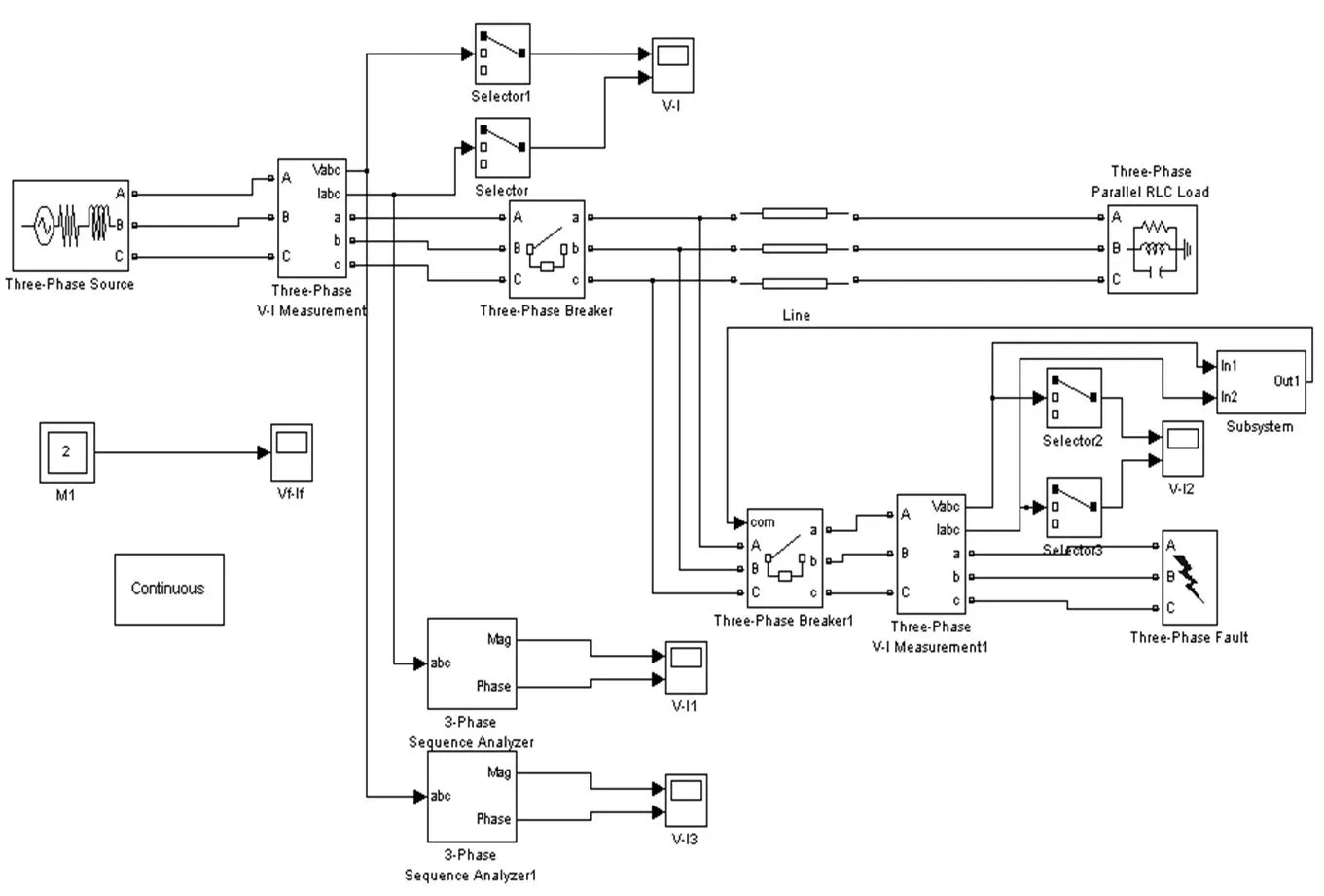
图3 短路保护仿真模型
3.2.1三相短路分析
1)故障点A相电压、电流变化
用选择器选取三相故障发生器所在的支路的电流和电压,则故障点A相电流、电压波形如图4所示。由图4可以得出如下结论:在稳态时,故障点A相电流由于三相短路故障发生器处于断开状态,因而电流为0,A相电压实际是加在线路Line上的电压,因此呈正弦规律变化。
在0.01 s时,三相短路故障发生器闭合,此时电路发生三相短路故障,故障点A相电流发生明显变化,由于闭合时有初始输入量和初始状态量,因而故障点A相电流波形下移,而A相电压由于接地变为0。在0.04 s时,保护元件动作,使三相电路短路故障发生器断开,相当于排除故障,此时故障点A相电流迅速变为0,而A相电压要恢复到线路Line上的电压,因此存在一段时间的暂态波动。
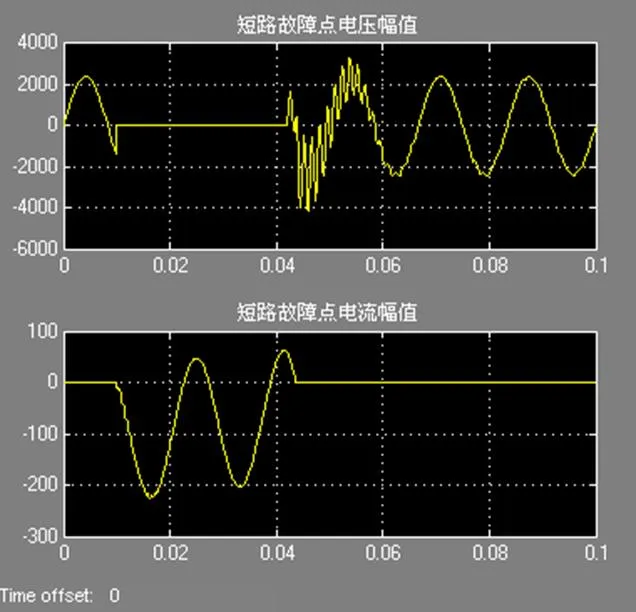
图4 故障点短路电流、电压波形
图5 支路Line的电流波形
2)支路Line的电流变化
支路Line电流变化如图5所示。由图可以看出,在故障瞬间,支路Line电流受故障点电流影响,发生了明显变化,电流的剧烈增大给支路Line相设备带来了极大的冲击。
3.2.2两相短路分析
在三相电路短路故障发生器参数中选择A相故障和B相故障,即发生A、B相短路接地故障。激活仿真按钮,进行电路仿真。
1)故障点A相电流序分量波形图
使用三相序分量分析元件中分别选中故障点A相电流正序、负序和零序分量作为测量值,进行仿真,则A相电流正序、负序和零序分量波形如图6、图7和图8所示。
图6 故障点A相电流正序分量波形
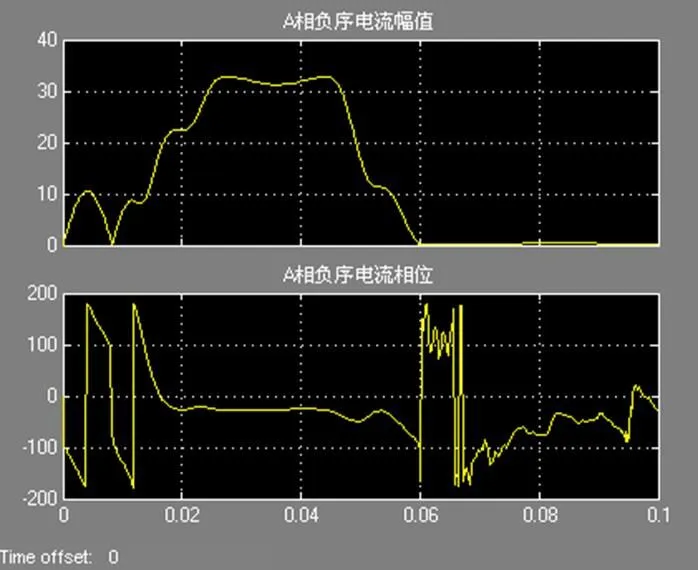
图7 故障点A相电流负序分量波形
由图可知:稳态时,故障点A相电流正序分量由于三相短路故障发生器处于断开状态,因而幅值为0,相角为0。在0.01 s时,三相短路故障发生器闭合,此时电路发生A、B相短路,故障点A相正序、负序和零序电流发生变化,正序电流幅值迅速上升,相角先上升后下降;负序电流幅值迅速上升,相角突变大约360°后,下降至大约-30°时稳定;零序电流幅值缓慢上升,相角经过突变后,缓慢波动上升。在0.04 s时,故障保护元件动作,使三相电路短路故障发生器打开,相当于排除故障,此时故障点A相电流正序分量的幅值下降,至0.06 s时幅值下降为65 A,相角上升,至0.06 s时恢复至故障前的数值;0.04 s故障点A相电流负序分量幅值下降,至0.06 s时幅值为0,相角继续下降,至0.06 s时降为大约-90°,然后波动稳定到0;在0.04 s时,故障点A相电流零序分量幅值缓慢波动下降,在0.06 s时发生突变,然后稳定在0,0.04 s时相角继续缓慢波动上升,在0.06 s经过突变后稳定至110。需要注意的是:A相电流零序分量幅值很小,几乎很难测出来。
2)支路Line的电流波形图
选择支路Line的A、B、C相电流作为测量电气量进行仿真,则A、B、C相电流如图9所示。由图9可以得出如下结论:在稳态时,支路Line的A、B、C相电流由于三相短路故障发生器处于断开状态,因而电流成正弦规律变化。在0.01 s时,三相电路短路故障发生器闭合,此时电路发生A、B两相短路接地,故障点A、B、C相电流发生变化,由于有初始输入量和初始状态量,因而故障点A相电流迅速下移,故障点B相电流上移,C相电流由于没有发生故障而未发生变化。在0.04 s时,故障保护元件起作用,三相短路故障发生器打开,相当于排除故障,此时A、B、C相电流迅速回复到故障前的状态。
通过上面对短路故障的仿真分析,可以看出,采用相敏保护和负序保护原理对短路故障进行分析,可以有效地避免短路事故的发生。
4 结束语
本文针对船舶高压电站短路故障,结合对称分量法,分析了两相短路、两相接地短路和三相短路中各序分量的幅值和相位关系。提出了采用具有较宽选择余地的相敏保护原理对三相对称性短路进行保护,设计了基于负序电流的不对称性短路保护算法。为了验证算法的有效性,采用Matlab对算法进行了仿真,建立了故障保护仿真模型,给出了故障保护特性曲线,并对其进行了分析。通过分析表明,本文所提到的故障保护算法具有较高的可靠性和实时性,能够满足船舶高压电站短路故障保护的要求。
参考文献:
[1] 褚江. 船舶高压电站自动化及监控系统的设计与实现[D]. 大连: 大连海大学,2015.
[2] 张元玮, 王良秀, 王硕丰等. 海洋工程船舶综合电力推进系统关键技术分析[J]. 船舶工程, 2014, 3:75-80.
[3] 孙良友, 涂昌期. 浅谈用对称分量法分析电力系统故障[J]. 船电技术, 2004, 6: 38-40.
[4] 卢继平, 罗与锋, 钟璐. 基于单侧信息的多分支配网单相接地故障定位[J]. 高电压技术, 2016, 2:605-609.
[5] 王宾, 祝龙记. 基于单片机的矿用电动机相敏保护的实现[J]. 工矿自动化, 2006, 2:27-29.
[6] Kwang-Hoon Oh, Young Chul Kim. Investigation of short-circuit failure limited by dynamic-avalanche capability in 600-V punch through IGBTs[C]. IEEE Transactions on Device and Materials Reliability, 2006: 6-8.
Short-Circuit Fault Protection Arithmetic of Marine High Voltage Power Station
Cheng Zhenqi
(Marine Engineering Department of Nantong Shipping College, Nantong 226010, Jiangsu, Chia)
U665
A
1003-4862(2016)10-0049-06
2016-04-12
程真启(1976-),男,讲师/电机员。研究方向:船舶电气设备及自动化。