电磁导引智能小车的设计与实现
2016-11-15刘晋泽朱燕红
刘晋泽,朱燕红
(1.中南大学 信息科学与工程学院,湖南 长沙 410083;2.国防科学技术大学 机电工程与自动化学院,湖南 长沙 410073)
电磁导引智能小车的设计与实现
刘晋泽1,朱燕红2
(1.中南大学 信息科学与工程学院,湖南 长沙 410083;2.国防科学技术大学 机电工程与自动化学院,湖南 长沙 410073)
以全国大学生飞思卡尔杯智能汽车竞赛为背景,介绍了一种基于电磁导引的自主寻迹智能小车系统。综合考虑电磁组的各种复杂赛道元素,设计了“四横两斜”的混合线圈排布方案,在此基础上提出了一种基于分段拟合建模与动态加权融合的赛道位置解算方法。试验结果表明,该方法具有良好的环境适应性,电磁小车可针对不同路径高速稳定地运行。
智能车;电磁导引;赛道识别;自主寻迹
0 引言
全国大学生智能汽车竞赛以汽车电子为背景,设计内容涵盖了自动控制、模式识别、传感技术、电子、计算机、机械、能源等多个学科知识,其研究对培养学生的知识融合与实践动手能力、创新意识与挑战精神具有良好的推动作用[1]。
一个完整的智能车系统包括环境感知、规划决策和运动控制三大部分,其功能分别相当于人类的眼睛、大脑和四肢。其中环境感知的可靠性和准确性对智能车的整体控制起着关键作用,其感知检测结果是实现智能车运动控制的前提。
根据智能车竞赛规则,电磁组的赛道中心敷设有一根通有20 kHz、100 mA交变电流的电磁导引线,智能车利用电磁感应原理检测其产生的交变磁场,以此来判断路径并控制小车沿着赛道行驶[2]。考虑到20 kHz交变电流所产生的电磁波属于甚低频电磁波,通常选用10 mH的工字电感线圈作为电磁传感器,并将导线周围变化的磁场近似为缓变磁场,按照检测静态磁场的方法获取导线周围的磁场分布。
为叙述方便,本文建立了如图1所示车体坐标系:假设以小车前进方向为z轴,平行于赛道且与z轴垂直向左为x轴,垂直于xz平面向上为y轴,xyz轴满足右手定则。同时约定文中提到的“小车与赛道中心线的偏离距离d”均表示车模前上方排布的左右两组线圈的中心与电磁导引线的距离。
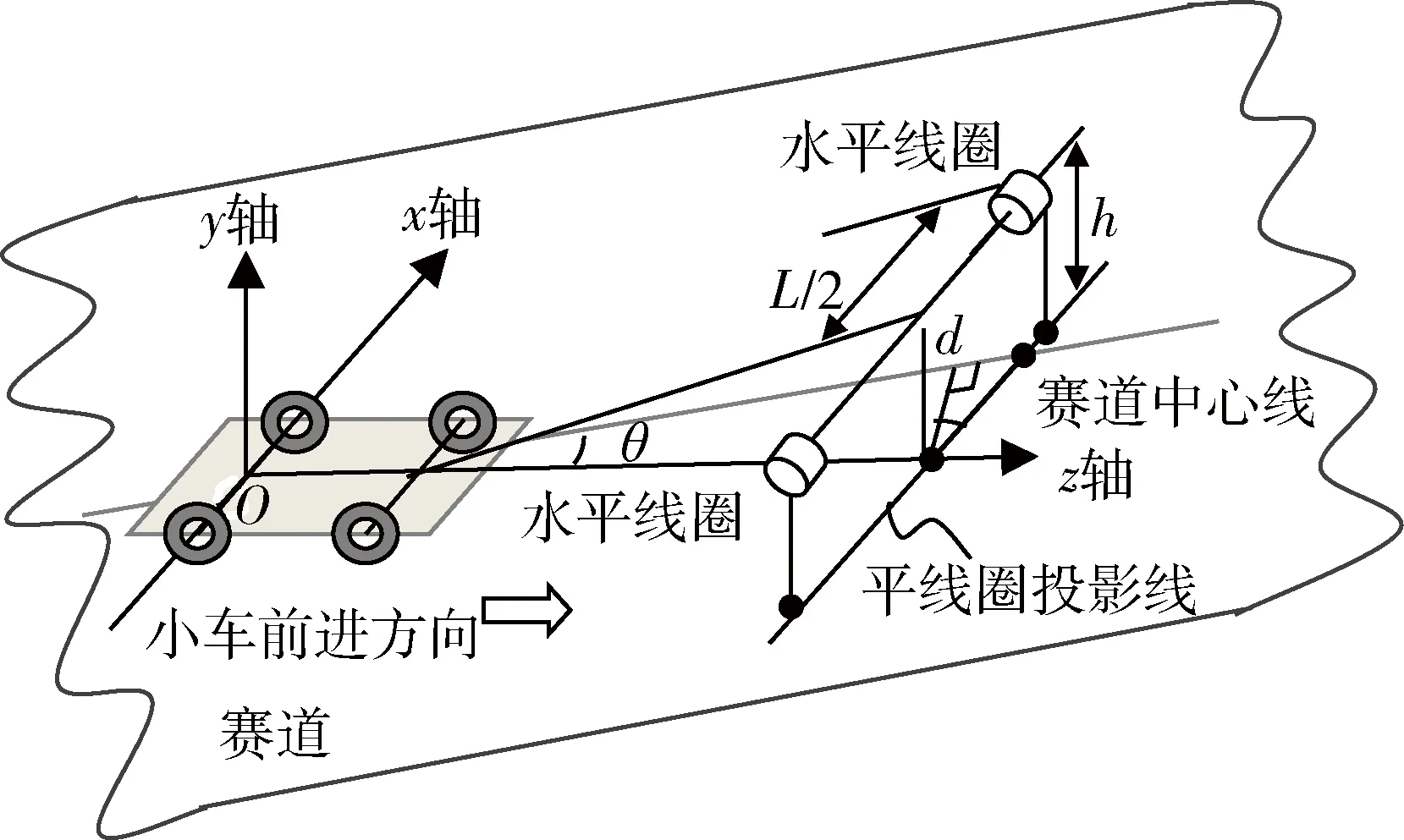
图1 车体坐标系、电感布局与赛道三者关系示意图
根据毕奥-萨法尔定律和法拉第电磁感应定律,在车模前上方水平排布的线圈,其检测的感应电动势经放大和检波后,可得到一个直流信号E与水平距离x的关系,据此可解算出小车当前的位置偏差。然而采用单水平电感检测只能反映位置偏差绝对值的大小,无法分辨偏离方向。为了弥补单电感无法分辨左右的问题,可采用双水平线圈检测方案[2],即在车模前上方高度为h的水平方向对称排布两个相距L的水平线圈(如图1所示),并对两线圈的感应电动势作差值(简称差值法),据此可判断小车的偏离方向和位置偏差。该方法计算简单,直观形象,但由于其两端线性度不高,误差较大,在复杂道路环境下经常会出现误判[3]。究其原因,主要是因为小车在不同赛道元素上行驶时,电感线圈在赛道上的投影与电磁导引线存在夹角θ,从而导致由线圈检测的感应电动势计算得到的偏离距离与实际存在偏差[4],尤其是在直角弯等复杂赛道上容易引起误判。
为了解决上述问题,在综合考虑电磁组各种复杂赛道元素[5]的基础上,本文提出了一种基于分段拟合建模与动态加权融合的赛道位置解算方法,最终实现了可针对不同路径、稳定快速运行的电磁导引智能小车的制作,并通过大量的实车试验验证了本设计的可行性和有效性。
1 系统总体方案设计
电磁导引小车总体结构如图2所示,主要由主控模块、传感器模块、底层控制模块、电源管理模块和人机交互模块等几部分组成。主控模块以MC9S12XS128单片机为核心控制部件,主要负责完成各种传感器信息的采集、小车的赛道识别、速度规划与运动控制,以及必要的人机交互功能;传感器模块主要负责感知外部世界的环境信息与小车自身的状态信息,如利用电磁传感器获取赛道信息、干簧管检测起始线位置、光电编码器检测车模速度等;底层控制模块负责执行主控模块发出的PWM运动控制指令,实现小车的前进与转向;电源管理模块采用7.2 V/2 000 mAh的镍镉电池供电,并通过DC-DC稳压转换模块向系统中各功能模块提供所需的电源电压;人机交互模块主要包括拨码开关、LED灯、蜂鸣器、键盘、液晶显示器、SD卡、无线通信模块和BDM调试模块等,以方便用户调试和监控。
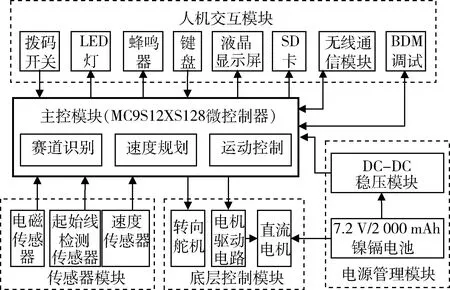
图2 电磁导引智能小车系统结构框图
2 软件系统总体框架
系统软件如图3所示,其核心部分主要包括传感器数据获取、赛道提取、舵机控制、电机控制等。其中赛道提取是软件设计的重要环节,其主要任务是根据电感线圈检测信号确定当前赛道的类型和车—路关系,为小车的方向控制和速度控制提供依据。而舵机控制就是指赛车的方向控制,它以赛车车体为参考系,通过小车与赛道中心线的位置偏差来设计增量式PD控制器,以此得到控制舵机的PWM波占空比;舵机驱动车模前轮转向,使赛车中心线始终逼近电磁导引线。电机控制就是指赛车的速度控制,其期望速度来源于速度规划环节,实际转速采用光电编码器检测,通过设计增量式的PI控制和BANG-BANG控制相结合的方法实现对赛车速度的闭环控制。

图3 系统软件总体框架
3 基于分段拟合与动态加权的赛道位置解算
综合考虑电磁组中的小S弯、大S弯、十字交叉、大回环、坡道,以及直角弯等各种复杂赛道元素[5],本文提出了一种基于分段拟合与动态加权的赛道位置解算方法。该方法采用“四横两斜”的混合线圈排布方案,具体如图4所示。图中,4个水平线圈1~4分别排布在车模前上方左右对称的-10 cm、-5 cm、5 cm、10 cm处;最外侧对称排布着倾斜角度为45°的线圈5和线圈6;各线圈检测到的感应电动势分别用E1、E2、E3、E4、E5、E6表示。
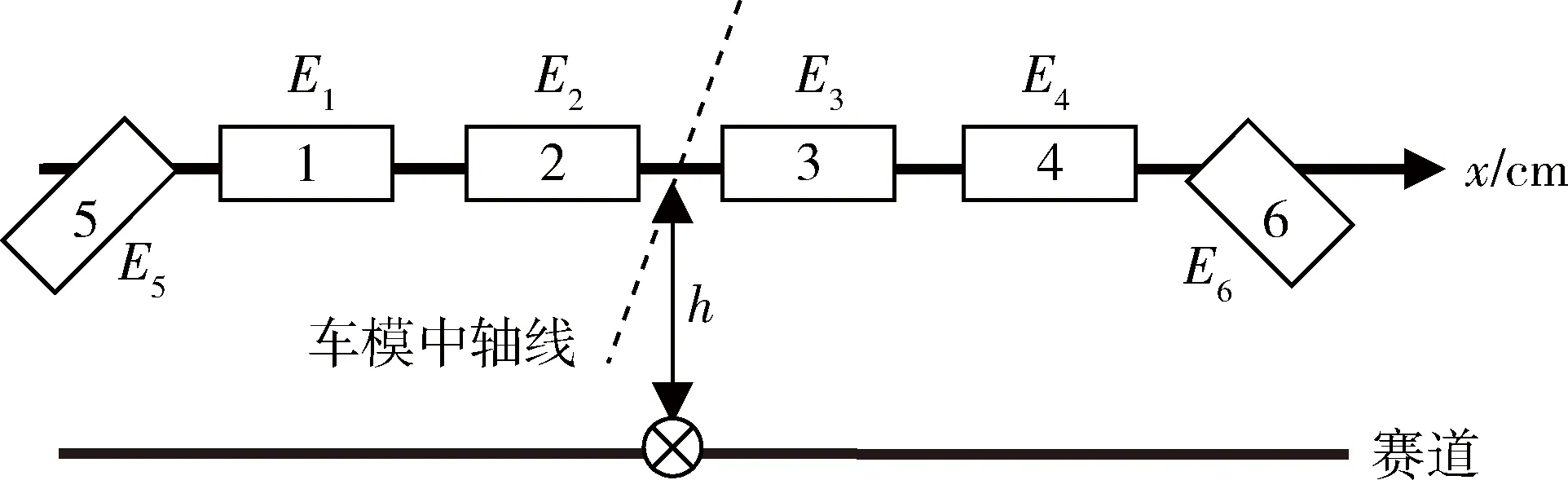
图4 “四横两斜”混合线圈排布方案示意图(前视图)
如图5所示,基于分段拟合与动态加权的赛道位置解算方法的基本思想为:首先采集6个线圈的感应电动势(E1~E6)并对其进行比较,当E2或E3最大时,表明小车与赛道的偏离距离d∈[-10 cm,10 cm]区间,此时将采用四水平线圈检测的感应电动势E1~E4进行三次多项式拟合,并通过求极值的方法来解算赛道偏移位置d1;而当E1最大时,表明小车与赛道的偏离距离d∈[-20 cm,-10 cm)区间,此时将利用感应电动势E1,通过离线拟合的线性函数来解算赛道偏移位置d1;同理,当E4最大时,表明小车与赛道的偏离距离d∈(10 cm,20 cm]区间,此时也将利用感应电动势E4,通过离线拟合的线性函数来解算赛道偏移位置d1;与此同时,还要根据两侧内八字斜电感的感应电动势E5和E6,利用差值法来解算赛道偏移位置,并将其记为d2;最后将d1与d2加权求和,即可得到最终的赛道偏移位置为:
d≈α·d1+(1-α)·d2
(1)
其中,α为权重系数,α∈[0,1]。α的计算公式为:
(2)
式中,T为阈值,其值需根据实际制作的车模以及赛道的复杂程度进行确定。为了兼顾直角弯、大回环等特殊赛道元素,经过反复试验,本文取T=160。
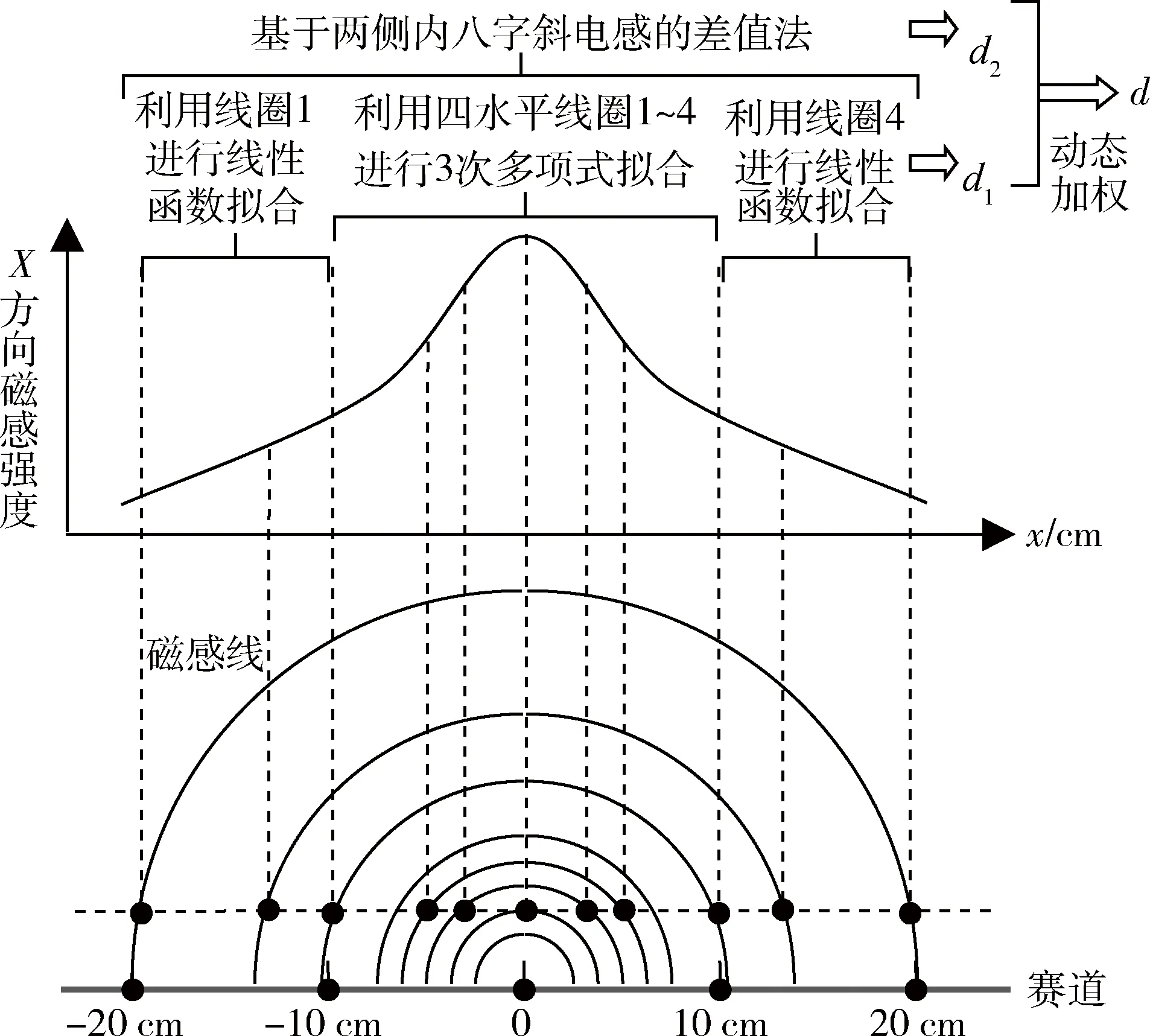
图5 基于分段拟合与动态加权相结合的赛道位置解算示意图
4 实车试验结果及分析
为了验证本文工作的有效性,笔者搭建了一台实验用电磁小车,并进行了大量的实车测试。
试验结果表明,当小车在直道上行驶时,由于线圈2和线圈3距离导引线较近,感应电动势E2+E3大约在170以上,此时主要由三次多项式拟合来解算赛道位置偏差;而当小车在弯道行驶时,由于线圈2和线圈3偏离导引线,偏离程度越大其感应电动势之和越小,相应地α值越小,此时三次多项式拟合的权重逐渐减小,双斜电感差值法的权重逐渐加大。由于双斜电感差值法对弯道的检测更为敏感,所以增加了转弯的灵敏性。特别地,当小车行驶至直角弯时,中间两个线圈的感应电动势之和连续递减,相应地其权重也线性递减,很好地解决了直角弯的连续性问题。图6给出了小车在经过直角弯的过程中,采用未加权求和进行赛道位置解算与采用加权求和进行赛道位置解算的直角弯位置偏差变化对比图。由图6可知,采用加权算法求得的直角位置偏差连续性增强,有效地减弱了由直道进入直角弯的突变性,从而可以利用位置以及位置偏差的变化量判断出赛道类型,据此进行速度规划和运动控制。另外还可以避免弯道与直角判断条件的冲突,增强了算法的环境适应性。
5 结论
本文以电磁导引智能车为研究对象,介绍了系统的总体结构和软件框架。针对复杂赛道元素识别问题,提出了一种基于分段拟合建模与动态加权融合的赛道位置解算方法。试验结果表明,该方法具有良好的环境适应性,以此制作的电磁小车可以针对不同路径快速稳定地运行。
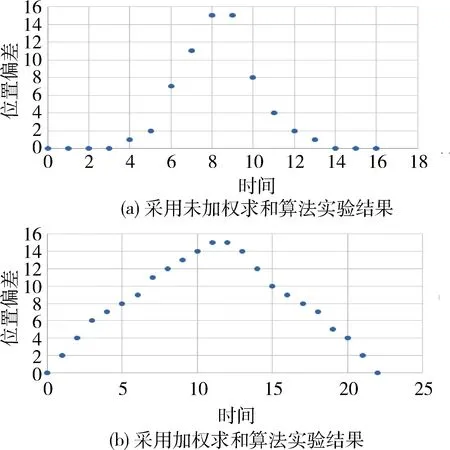
图6 经过直角弯道的位置偏差变化图
[1] 蔡述庭.“飞思卡尔”杯智能汽车竞赛设计与实践—基于S12XS和Kinetis K10[M].北京:北京航空航天大学出版社,2012.
[2] 竞赛秘书处.电磁组竞赛车模路经检测设计参考方案[EB/OL].(2010-01-10)[2014-11-18].http://www.smartcar.au.tsinghua.edu.cn/upload_files/atta/1383549442041_32.pdf.
[3] 孙书咏.电磁轨道智能车赛道检测方法研究[J].西安邮电学院学报,2011,16(6):39-41.
[4] 陈国定,张晓峰,柳正杨.电磁智能车电感排布方案[J].浙江工业大学学报,2016,44(2):124-128.
[5] 竞赛秘书处.第十届全国大学生智能车竞赛竞速比赛规则[EB/OL].(2014-11-13)[2014-11-18].http://www.smartcar.au.tsinghua.edu.cn/upload_files/file/20141113/1415849436019034624.pdf.
Design and inplementation of the electromagnetic guided smart car
Liu Jinze1,Zhu Yanhong2
(1.School of Information Science & Engineering,Central South University,Changsha 410083,China; 2.College of Mechatronics Engineering and Automation,National University of Defense Technology,Changsha 410073,China)
Based on the Freescale smart car competition,a smart car system with the autonomous tracking ability based on the electromagnetic guidance was introduced.Considering of all kinds of complicated road elements in electromagnetic group,the “four horizontal two oblique” mixed coil allocation scheme was designed,and the track position calculating method was proposed,which based on subsection modeling and dynamic weighted fusion.The test results show that the method has a good environmental adaptability,and the electromagnetic smart car can steadily run on high speed for different paths.
smart car; electromagnetic guidance; road detection; autonomous tracking
TP273
A DOI:10.19358/j.issn.1674-7720.2016.19.016
刘晋泽,朱燕红.电磁导引智能小车的设计与实现[J].微型机与应用,2016,35(19):53-55.
2016-07-12)
刘晋泽(1995-),通信作者,男,本科生,主要研究方向:通信工程、嵌入式系统开发。E-mail:464894537@qq.com.
朱燕红(1985-),女,硕士,助理实验师,主要研究方向:控制学科实验教学。
