主动补偿式超低干扰力矩气浮转台的设计
2016-11-15刘延芳刘兴富齐乃明
刘延芳,刘兴富,齐乃明,张 刘
(1. 哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001;2. 上海微小卫星工程中心,上海 201210;3. 吉林大学 仪器科学与电器工程学院,吉林 长春 130061)
主动补偿式超低干扰力矩气浮转台的设计
刘延芳1*,刘兴富2,齐乃明1,张刘3
(1. 哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001;2. 上海微小卫星工程中心,上海 201210;3. 吉林大学 仪器科学与电器工程学院,吉林 长春 130061)
由于微纳卫星反作用飞轮的输出力矩与气浮转台的干扰力矩属于同一量级,故无法直接采用气浮转台实现微纳卫星姿态动力学仿真及姿控系统的地面试验验证。为了解决这一问题,设计并研制了主动补偿式超低干扰力矩气浮转台。对气浮转台的干扰力矩进行分析,提出了3种减小干扰力矩的方法: 通过优化设计,降低了黏滞阻尼力矩; 通过配置斜向节流孔,并单独供气,产生大小可调的主动涡流以抵消气浮轴承的固有涡流,从而降低涡流力矩; 利用气浮轴承的摆动特性实现高精度平衡调节,减弱了重力诱导力矩。最后,设计了微小力矩测量装置,测量了剩余干扰力矩并基于测试结果来指导涡流力矩和重力诱导力矩补偿过程。测试结果显示:气浮转台实现的干扰力矩小于5×10-5Nm,小于反作用飞轮的最小输出1×10-4Nm,满足微纳卫星姿态动力学及控制的地面验证需求。
微纳卫星;气浮转台;干扰力矩;主动补偿
1 引 言
转台可实现单个或多个自由度的姿态运动,被广泛应用于航天器惯导等敏感器标定和姿态运动仿真等领域[1-2]。其中,气浮转台具有微摩擦、高精度、低噪声等优点,成为航天器姿态控制系统及反作用飞轮等关键部件的地面仿真验证的重要手段[3-5]。
干扰力矩作为气浮转台的重要技术指标,一般可达到1×10-3Nm[6-7]。2003年霍尼韦尔空间实验室研制的MCS/LOS气浮转台的不平衡力矩为1.33×10-3Nm[8-11];NASA研制卫星编队仿真系统中气浮转台的干扰力矩为5×10-3Nm[12-16];徐开等[17]研制的小卫星姿态模拟器俯仰轴干扰力矩约为5×10-4Nm。然而,微纳卫星转动惯量较小,姿控所采用的反作用飞轮的最小输出力矩为1×10-4Nm,饱和力矩为1×10-3Nm。减弱或补偿气浮转台的干扰力矩,成为微纳卫星姿态动力学仿真及姿控系统的地面试验的新课题。
气浮转台的干扰力矩根据成因可分为阻尼力矩、不平衡力矩、涡流力矩等[18-20]。加工及装配误差是造成涡流力矩的主要因素,人们从狭缝宽度、气膜厚度、节流孔孔径误差、位置误差、方向误差等方面进行了大量仿真分析[21-25];并采用微克计测力或陀螺测转速的方式进行了试验验证[20-21]。然而,通过提高加工精度来降低干扰力矩的效果有限,而且随着对加工精度要求的提高,成本急剧增加。相比而言,通过被动或主动补偿降低干扰力矩具有明显优势。文献[19]通过调整姿态对常值干扰力矩进行补偿,但该方法不适用于同时具有重力干扰力矩的情况。文献[26]采用供气孔独立供气的方式补偿供气孔加工误差及球窝安装误差引起的涡流力矩,但当气浮轴承结构比较负载(如“T”型轴)、节流孔数量比较多时,每个气孔的设计实现比较复杂。
本文为了实现微纳卫星的姿态动力学及姿控系统的地面试验验证,设计了主动补偿式超低干扰力矩气浮转台。在气浮轴套上,除了传统的实现承载的节流孔外,同时配置了逆时针和顺时针两组斜向节流孔,并通过单独供气产生大小可调的主动涡流,用于抵消由于加工装配误差造成气浮轴承的固有涡流。同时,配置了高精度的力矩测量装置,用于监测补偿后剩余的干扰力矩。综合高精度的平衡调节和水平度调节,从涡流力矩、重力诱导力矩、黏滞阻尼力矩等方面对干扰力矩进行控制,从而实现了单轴气浮台综合干扰力矩不大于5×10-5Nm的技术指标,满足微纳卫星姿态动力学仿真及姿控系统的地面试验验证的应用要求。
2 干扰力矩分析
超低干扰力矩气浮转台的主要功能是承载微纳卫星模拟器,提供超低干扰单自由度自由转动,实现微纳卫星姿态动力学仿真及姿控系统的地面试验验证。其核心技术指标是干扰力矩不大于5×10-5Nm。为了实现这一指标要求,首先对气浮轴承的主要干扰力矩(重力诱导力矩、黏滞阻尼力矩和涡流力矩)进行分析,用于指导气浮轴承的设计。
2.1重力诱导力矩
重力诱导力矩主要是由转台不水平和不平衡引起的。如图1所示,以过气浮轴及其上负载合质心P且垂直气浮轴回转轴的平面为基准平面x-O-z,以基准平面与回转轴的交点为坐标原点O,以回转轴为O-y轴,垂直基准平面向上为正方向,以基准平面与过O的当地水平面的交线为O-z轴,通过右手坐标系确定O-x轴,从而确定基准坐标系O-xyz。以过O点的当地水平面为参考平面x0-Oz0,以过O点的当地铅垂线为O-y0轴,O-z0轴与Oz轴重合,通过右手坐标系确定O-x0轴,从而建立参考坐标系O-x0y0z0。轴承的不水平度通过基准平面与参考平面的夹角表示,记为g;质偏距记为r,方向角为y;气浮轴及其上负载的总质量记为m。

图1 重力诱导力矩示意图Fig.1 Diagram of moment induced by gravity
重力mg可以分解为法向力FN、径向力Fr和切向力Ft。切向力产生干扰力矩,可以表示为[27]:
Tg=mgrsinγsinψ.
(1)
因此,重力诱导力矩是回复力矩,当质偏方向满足:
ψ=kπ+0.5π,k∈N,
(2)
时,重力诱导力矩最大。γ为小量时,最大重力诱导力矩近似为:

图2 重力诱导力矩随偏心距和水平度的变化规律Fig.2 Effect of eccentricity and the levelness on moment induced by gravity

(3)
因此,最大重力诱导力矩与质偏距和不水平度成正比,如图2所示。通过平衡调节和水平度调节可以减小该项干扰力矩。
2.2黏滞阻尼力矩
空气的黏滞阻尼引起的切应力可以近似为:

(4)
其中:μ为空气黏性系数,V为相对运动速度,n为相对厚度,这里为气膜厚度。气浮轴承采用“T”型轴,如图3所示,包含止推轴承和径向轴承。

图3 气浮轴承结构示意图Fig.3 Framework of air bearing
两部分的黏滞阻尼力矩分别为[28]:
(5)
(6)
因此,“T”型气浮轴的黏滞阻尼力矩为:

(7)
轴承黏滞阻尼力矩随轴套的内径和外径的变化关系如图4所示。黏滞阻尼力矩随外径和内径的减小而减小,其中随外径的变化更明显。然而,轴承的承载能力随外径减小而减小,但却随内径减小而增加。同时,从式(7)可以看到,一旦完成气浮轴承的设计,黏滞阻尼力矩只会随着工作的转速变化,没有调节和补偿的手段。因此,在满足轴承的承载能力和加工工艺等要求时,应尽可能减小内径和外径,从而减小黏滞阻尼干扰力矩。

图4 黏滞阻尼力矩随气浮轴套内径和外径的变化Fig.4 Effect of internal and external diameters of air bearing sleeve
2.3涡流力矩
涡流力矩主要由加工装配误差引起的切向气流产生[21-29]。理论上,如果加工精度能够得到保证,涡流干扰力矩可以降低到2×10-4Nm[21, 28-29],但由于对加工装配工艺的苛刻要求,很难实现。根据工程经验,高精度的单轴气浮转台的综合干扰力矩可以达到10-4Nm,除去阻尼力矩和重力诱导力矩,涡流力矩的量级在0.5×10-5~5×10-5Nm。其中常值涡流力矩部分在加工装配完成后,只与供气压力有关,可以采用一定的手段进行补偿。
3 干扰力矩作用下轴承的摆动特性
在干扰力矩的作用下,轴承动力学方程为:
(8)
将式(1)和式(7)代入式,并假设小角度摆动时,得到:

(9)
式中:
(10)
(11)

(12)

(13)
显然,在干扰力矩的作用下,轴承表现出振荡衰减的运动特性,通过测量振荡周期,根据:

(14)
计算得到质偏为:

(15)
在没有涡流力矩时,振荡的平衡位置反方向即为质偏方向。涡流力矩导致平衡位置与质偏方向存在偏差。如图5所示,质偏方向误差随着质偏的减小急剧增加,同时从式(10)可以得到,质偏方向误差与涡流力矩成正比。因此,平衡调节需要在涡流补偿后进行。
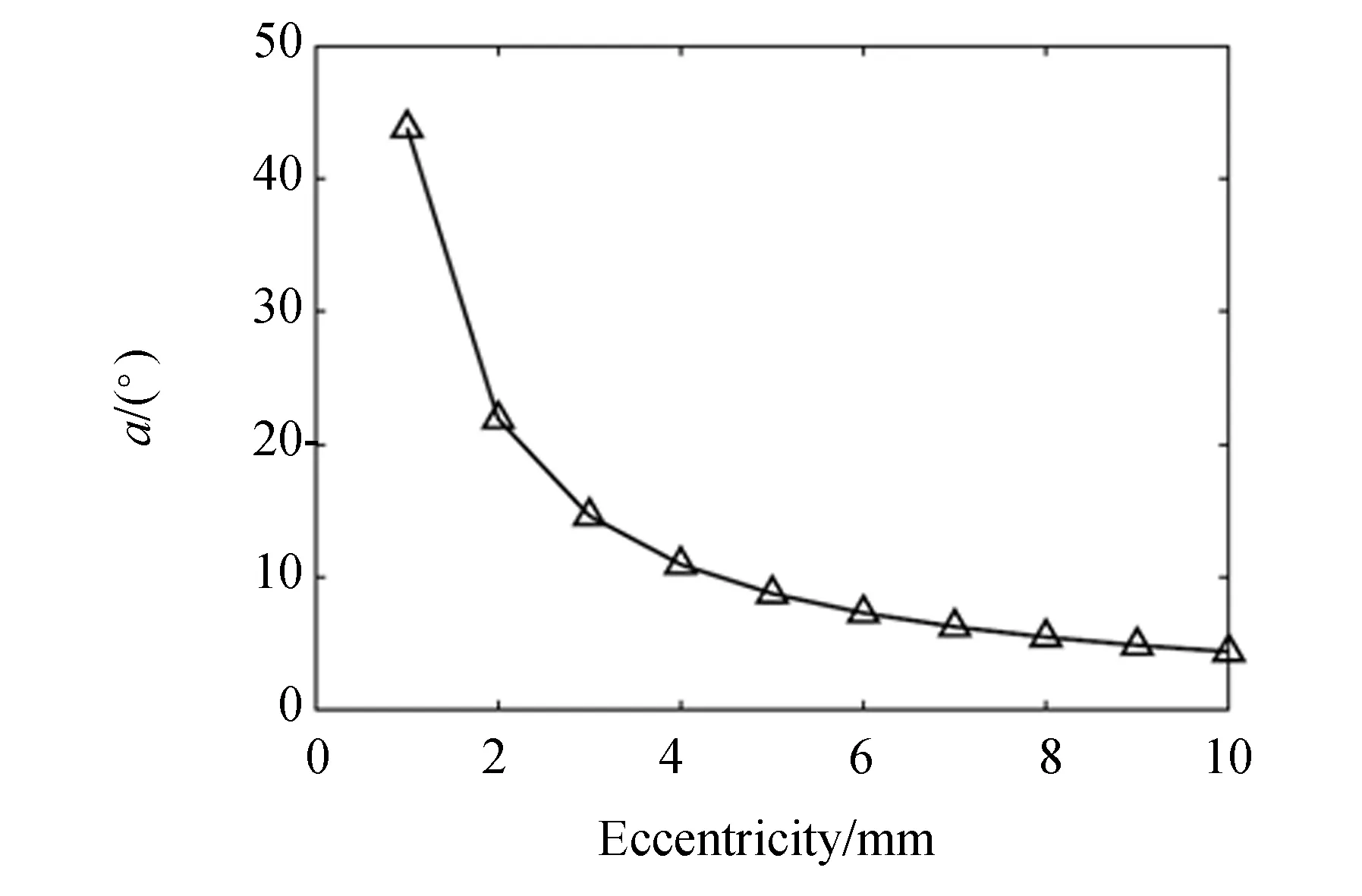
图5 质偏方向误差随质偏距的变化Fig.5 Relation between error of centroid direction and eccentricity
4 主动补偿式ABT的设计实现
主动补偿式ABT的总体设计如图6所示,其核心部分为:(1)为了补偿涡流力矩,设计斜向节流孔,并单独供气,产生主动涡流抵消气浮轴承固有涡流;(2)设计微小力矩测量装置,实现转台剩余干扰力矩测量。

图6 主动补偿式气浮台总体结构示意图Fig.6 Framework of active air bearing table
4.1气浮轴系
主动补偿气浮轴承结构如图7所示,为了实现对涡流力矩的主动补偿,在气浮轴套的B-B截面处增加了2组调节节流孔,分别实现顺时主动针涡流和逆时针主动涡流。两组节流孔分别采用单独的气路和气腔供气,且供气压力可调。通过选择开启顺时针涡流供气管路或逆时针涡流供气管路,并调节供气压力,可实现不同大小和方向的主动涡流。当主动涡流与原轴承的涡流大小相同、方向相反时,可以实现对气浮轴承涡流力矩的补偿。加工完成的气浮轴和气浮轴套如图8所示。
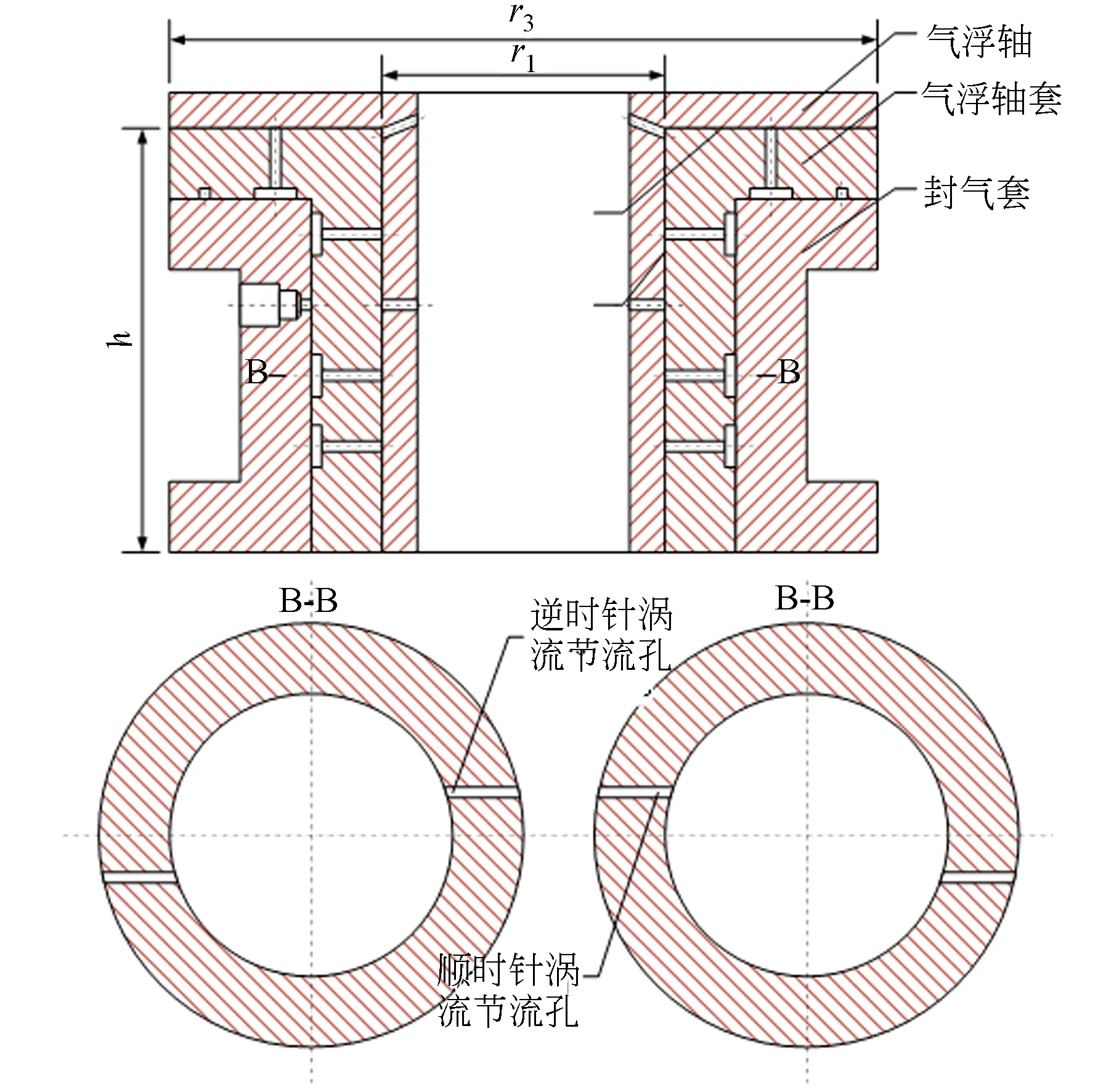
图7 主动补偿式气浮轴承结构示意图Fig.7 Framework of active air bearing

(a)气浮轴 (b)气浮轴套(a) Air bearing shaft (b) Air bearing sleeve
4.2微小力矩敏感器布局
气浮转台的平衡调节和主动涡流的调节都需要测量剩余干扰力矩,因此,在转台上设计了一套微小力矩测量装置,如图9所示。
微小力矩测量装置采用平衡法测量气浮轴承干扰力矩:干扰力矩驱动气浮轴旋转,并带动柔性探针作用于力敏感器,力敏感器产生阻力阻止气浮轴转动,并达到平衡,根据力敏感器示数和安装参数可计算出干扰力矩大小(此方法虽然无法测量黏滞阻尼力矩,但由于黏滞阻尼力矩在完成轴承加工后无法补偿或调节,并不影响通过该方法完成平衡调节和涡流力矩补偿)。

图9 微小力矩测量装置Fig.9 Constitute of micro-moment measurement device
由于采用力敏感器精度高、量程小,为了避免超量程造成损坏,设计了双重保护。(1)柔性探针接触力敏感器后发生弯曲,随着被测力矩的增加,弯曲变形增大,当变形达到一定程度时,柔性探针从力敏感器上划过,避免了作用于力敏感器的载荷过大。(2)气浮轴到柔性探针之间的力矩作用通过角接触轴承传递,通过改变调节螺母的预紧力可以改变轴承内环和外环之间的摩擦力矩,当被测力矩超过角接触轴承的摩擦力矩时,角接触轴承内环和外环相对转动,角接触轴承施加到柔性探针上的力矩达到峰值,不再增加。
为了避免轴承正常使用中力敏感器对转动造成的限制,设计了力敏感器脱离装置。装配完成后的微小力矩测量装置如图10所示。

(a)测量状态 (b)脱离状态(a) Contact state (b) Detachment state图10 微小力矩测量装置测量和脱离状态Fig.10 States of contact and detachment of micro-moment measurement device
4.3微小力矩测量精度分析
如图9所示,微小力矩测量中,力臂为柔性探针与力敏感器的作用点到气浮轴的回转轴之间的距离,设为L;力敏感器测量得到的力值记为F,则测量得到的力矩为:
T=FL,
(16)
力臂L通过游标卡尺测量,测量误差ΔL小于0.02 mm。力敏感器选用微弱力敏感器UL(A)-10GR,量程为10g,即98.07 mN,测量精度为满量程的0.1%,即0.1 mN。根据误差传播公式:

(17)
力矩测量的相对误差为:

(18)
根据设计实现结果,L+ΔL=(10.3±0.02) mm。因此,力矩测量量程9.84×10-4Nm,满量程测量精度为0.22%,即2.20×10-6Nm,精度满足测量要求。
5 干扰力矩补偿与结果
5.1涡流力矩主动补偿
涡流力矩与负载无关,因此,涡流力矩的补偿针对裸轴进行。由于裸轴加工精度高,不考虑不平衡导致的重力干扰力矩。因此,在完成裸轴水平度调节后,直接通过微小力矩测量装置测量涡流力矩。首先在不开启主动涡流供气时,判断固有涡流的方向,然后开启与之相反的主动涡流供气。在不同的主供气压力下,剩余涡流力矩随主动涡流供气压力的变化关系如图11所示。
固有涡流力矩(主动涡流供气压力为零时)随供气压强增大而增大,且涡流力矩变化率也变大。因此,在满足承载能力需求时,供气压力不宜太大。随着主动涡流供气压力的增加,可以有效抵消固有涡流力矩。然而,补偿之后剩余涡流力矩仍较大,这主要是由于在轴承设计时,对斜向节流孔产生的涡流大小估计得偏大,导致加工成后主动涡流补偿能力不足。同时,实验中发现,由于“T”型轴的角刚度偏弱,主动涡流供气压力过大时,容易导致轴承锁死,因此,正常使用中主动涡流供气压力不宜过大。试验结果同时为主动补偿式气浮轴承的改进设计提供了参考,进一步的优化改进:(1)增加主动涡流节流孔的偏置距离;(2)增加主动涡流节流孔的数量;(3)主动涡流节流孔布局在靠近止推面的位置,避免增加主动涡流供气压力时,由于“T”型轴角刚度弱而锁死的现象。
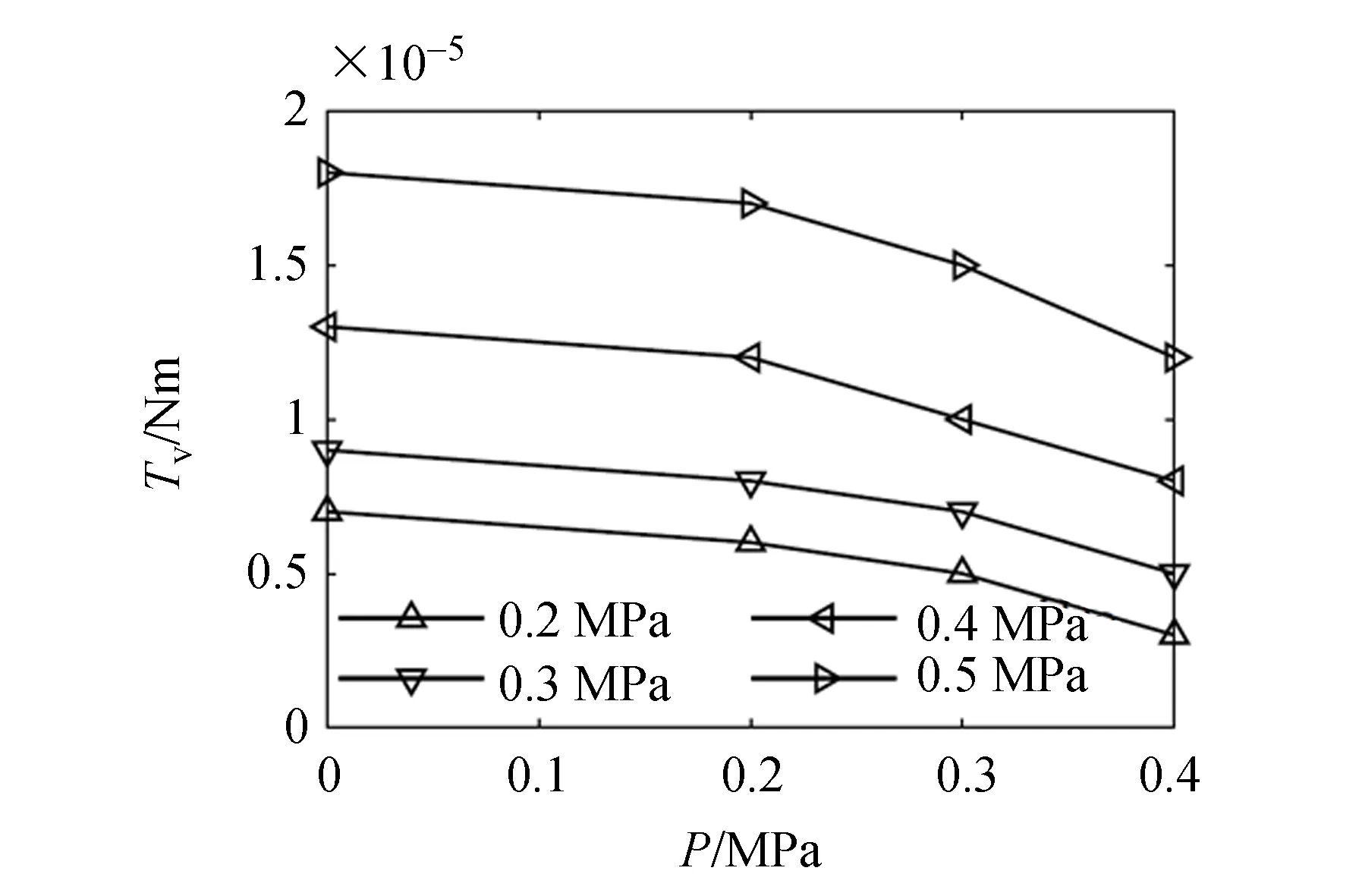
图11 涡流力矩补偿结果Fig.11 Compensated vertex moment
5.2重力诱导力矩补偿
平衡调节装置如图12所示。平衡调节充分利用前文分析的气浮轴的摆动特性:首先,通过转台支脚的调平机构将转台水平度调出-5° 的水平倾斜度;其次,利用让气浮轴小角度摆动,并通过圆光栅记录摆动角度;根据记录数据,确定摆动平衡方向,从而确定质偏方向,并利用式(15)计算质偏量;最后,计算确定配重移动距离,并完成配重位置调节。重复上述过程,直至计算出的质偏量优于2 mm。完成平衡调节后,将气浮转台调至水平状态,水平精度优于2″。

图12 平衡调节装置Fig.12 Balance adjustment system
5.3测试试验结果
完成主动涡流力矩补偿和重力诱导力矩补偿后,在主供气压力和主动涡流供气压力都为0.3 MPa时,对气浮转台干扰力矩经行了测试。微小力矩测量装置测得干扰力矩为2.3×10-5Nm。但该测量为静态测量,无法考虑黏滞阻尼力矩。为此,在转台自由转动过程中,利用速率陀螺测量记录转台转速,通过差分法计算角加速度并进一步估算干扰力矩。测量得到的角速度和干扰力矩如图13所示。干扰力矩的波动主要是由差分计算引起的,干扰力矩平均值为3.1×10-5Nm,标准差为1.5×10-5Nm。两种测量差异主要原因是陀螺差分测量得到的干扰力矩中耦合了黏滞阻尼力矩,同时也引入了陀螺的漂移误差干扰。

图13 陀螺差分测量得到的干扰力矩Fig.13 Disturbance torque measured by rate gyroscope
5.4大角度姿态机动试验
基于超低干扰力矩气浮转台搭建的微纳卫星姿控半物理仿真系统如图14所示,主要包括气浮转台、微纳卫星模拟器、地面控制台等3个分系统。

图14 微纳卫星姿控半物理仿真平系统结构图Fig.14 Char of hardware-in-loop simulation platform for attitude control system of micro- and nano-satellites
利用微纳卫星姿控半物理仿真系统,对大角度姿态机动进行了仿真试验,对陀螺测量精度、反作用飞轮的执行能力及控制算法性能等综合考核测试。姿态机动采用PID算法,姿态初始角度为3.317°,目标角度为180°,采用‘S’型路径规划,最大角速度为1.5°/s,最大角加速度为0.1°/s2,控制周期为100 ms。规划路径、实际响应及跟踪误差如图15所示,姿态角速度的响应如图16所示。卫星模拟器的实际姿态角很好地跟踪了规划轨迹,跟踪误差为±0.2°。最大跟踪误差出现在初始加速段和最终减速段,匀速段的跟踪误差小于0.05°。从角速度的响应曲线也可以看出,加速段和减速段角速度响应存在滞后,同时加速段和减速段结束时,角速度响应存在超调,最大跟踪误差小于0.1°/s,匀速段的跟踪误差小于0.03°/s。上述试验数据表明,在干扰力矩补偿后,反作用飞轮具有足够的执行能力实现微纳卫星大角度快速姿态机动,超低干扰力矩气浮转台应用于微纳卫星姿态动力学及控制地面具有一定的可行性。上述试验结果为微纳卫星姿控系统改进设计提供依据。

图15 姿态角及姿态角速度跟踪响应Fig.15 Response of attitude position and velocity
6 结 论
本文在对气浮转台的干扰力矩进行分析的基础上,设计并研制了主动补偿式超低干扰力矩气浮转台。通过优化设计,降低了黏滞阻尼力矩;通过配置斜向节流孔,并单独供气,产生大小可调的主动涡流,用于抵消气浮轴承的固有涡流;利用气浮轴承的摆动特性实现了高精度平衡调节,减弱了重力诱导力矩;设计了微小力矩测量转置,用于测量剩余干扰力矩并指导涡流力矩和重力诱导力矩补偿过程。试验测试结果表明,最终达到的干扰力矩小于5×10-5Nm,与理论分析结果一致,满足微纳卫星姿态动力学仿真及控制系统地面试验验证需求。
[1]李治国, 高立民, 张博妮,等. 空间光电跟踪系统动量平衡设计与试验[J]. 光学 精密工程, 2013, 21(1): 62-68.
LI ZH G, G GAO L M, ZHANG B N,etal.. Design and experiment of momentum balance wheels for optoelectric tracking gimbals [J].Opt.PrecisionEng., 2013, 21(1): 62-68. (in Chinese)
[2]王玉鹏, 王凯, 贾瑞栋, 等. 精指向自解锁星载太阳指向器设计与应用[J].光学 精密工程, 2016, 24(1): 65-72.
WANG Y P, WANG K, JIA R D,etal.. Design and application of accurate pointing and auto-unlocking sun tracker on satellite[J].Opt.PrecisionEng., 2016, 24(1): 65-72. (in Chinese)
[3]王绍举, 金光, 徐开. 高精度激光通信小卫星星座仿真平台设计[J]. 光学 精密工程, 2008, 16(8): 1554-1559.
WANG SH J, JIN G, XU K. Design of simulation platform for high precision laser communication small satellite constellation[J].Opt.PrecisionEng., 2008, 16(8): 1554-1559. (in Chinese)
[4]CUI P L, ZHANG H J, YAN N,etal.. Performance testing of a magnetically suspended double gimbal control moment gyro based on the single axis air bearing table [J].Sensors, 2012, 12(7): 9129-9145.
[5]INUMOH L O, FORSHAW J L, HORRI N M. Tilted wheel satellite attitude control with air-bearing table experimental results [J].ActaAstronautica, 2015, 117:414-429.
[6]田留德, 赵建科, 薛勋, 等. 基于单轴气浮台的角动量输出测量方法[J]. 中国测试, 2011, 37(6):41-44.
TIAN L D, ZHAO J K, XUE X,etal.. Measurement method angular momentum output based on one-axis air bearing test-bed[J].ChinaMeasurement&Test, 2011, 37(6): 41-44. (in Chinese)
[7]饶卫东, 徐李佳. 单轴挠性卫星快速机动试验台[J]. 空间控制技术与应用, 2011, 37(5):59-62.
RAO W D, XU L J. A simulation test-bed for rapid maneuver experiment of flexible satellite [J].AerospaceControlandApplication, 2011, 37(5):59-62. (in Chinese)
[8]JANA L S, MASON A P, CHARISTOPPHER D H. Historical review of air-bearing spacecraft simulators [J].JournalofGuidance,Control,andDynamics,2003, 26(4): 513-522.
[9]MASON A P, ANDREW R C. An air bearing-based teat-bed for momentum-control systems and spacecraft line of sight [C].Proceedingsofthe13thAAS/AIAASpaceFlightMechanicsWinterMeeting,AAS03-127.
[10]KIM B, VELENIS E, KRIENGSIRI P,etal.. A spacecraft simulator for research and education[C].AAS/AIAAAstrodynamicsConference,QuebecCity,Canada, 2001,AAS01-367.
[11]JUNG D, TSIOTRAS P. A 3-dof experimental test-bed for integrated attitude dynamics and control research[C].AIAAGuidance,NavigationandControlConference,Austin,Texas, 2003, 03-5331.
[12]BLACKWOOD G, SERABYN E, DUBOVITSKY S,etal.. System design and technology development for the terrestrial planet finder[C].SPIEInternationalSymposiumonOpticalScienceandTechnology,SPES48thAnnualMeeting,SanDiego,California, 2003: 5170-29.
[13]TIEN J Y, SRINIVASAN J M, YONG L E,etal.. Formation acquisition sensor for the terrestrial planet finder mission [C].IEEEAerospaceConferenceProceedings,BigSky,Montana, 2004: 6-13.
[14]OTERO A S, CHEN A, MOLLER D W,etal.. SPHERES-development of an ISS laboratory for formation flight and docking research[C].IEEEAerospaceConferenceProceedings,Piscataway,NJ, 2002: 1-59.
[15]WETTE M, SOHL G, SCHARF D,etal.. The formation algorithms and simulation testbed[C].NewYorkTimesBookReview, 2004, 29(5).
[16]REGEHR M W, ACIKMESE A B, AHMED A,etal.. The formation control testbed[C].IEEEAerospaceConferenceProceedings,BigSky,Montana, 2004: 557-564.
[17]徐开, 陈长青, 关文翠, 等. 小卫星姿控xPC半物理仿真系统设计[J]. 光学 精密工程, 2009, 17(2): 362-367.
XU K, CHEN CH Q, GUANG W C,etal.. Design of xPC semi-physical simulation system for small-satellite attitude control[J].Opt.PrecisionEng., 2009, 17(2): 557-564. (in Chinese)
[18]徐在峰. 三轴气浮台球轴承制造及安装误差引起的涡流力矩的研究[D]. 哈尔滨: 哈尔滨工业大学, 2007.
XU Z F.ResearchonVortexTorqueoftheThree-axisAirBearingTestbedCausedbyManufactureErrorsandFix-errorsofBallBearing[D]. Harbin: Harbin Institute of Technology, 2007. (in Chinese)
[19]向东, 杨庆俊, 包钢,等. 三轴气浮平台常值干扰力矩的分析与补偿[J]. 宇航学报, 2009, 30(2):448-452.
XIANG D, YANG Q J, BAO G,etal.. Research on analyzing and compensation of the steady disturbing torque of the three axis air bearing table[J].JournalofAstronautics, 2009, 30(2): 448-452. (in Chinese)
[20]郭楠楠. 卫星仿真三轴气浮台关键检测技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
GUO N N.StudyontheCriticalMeasurementTechnologyinThree-axisSimulatorUsedforSatelliteSimulation[D]. Harbin: Harbin Institute of Technology, 2012. (in Chinese)
[21]姚英学, 杜建军, 刘暾,等. 制造误差对气体静压轴承涡流力矩影响分析方法研究[J]. 航空学报, 2003, 24(2):124-128.
YAO Y X, DU J J, LIU T,etal.. Numerical analysis of manufacturing error influence on vortex torque of externally pressurized gas bearings[J].ActaAeronauticaEtAstronauticaSinica, 2003, 24(2): 124 -128. (in Chinese)
[22]梁迎春, 刘晶石, 孙雅洲,等. 狭缝和气膜尺寸对气浮陀螺仪涡流力矩的影响[J]. 润滑与密封, 2011, 36(3): 1-5.
LIANG Y CH, LIU J SH, SUN Y ZH,etal.. Effects of slit width and film thickness on vortex torque of air supported gyroscope [J].LubricationEngineering, 2011, 36(3):1-5. (in Chinese)
[23]秦冬黎, 姚英学. 小孔节流动静压混合气体润滑球轴承的干扰力矩分析[J]. 润滑与密封, 2007, 32(4): 131-135.
QIN D L, YAO Y X. Disturbing torque analysis of orifice compensated hybrid gas spherical bearing[J].LubricationEngineering, 2007, 32(4): 131-135. (in Chinese)
[24]毕国龙. 三轴气浮转台系统技术实现研究[D]. 哈尔滨工业大学, 2012.
BI G L.ResearchonTechnicalImplementationofThree-axisAirBearingSystem[D]. Harbin: Harbin Institute of Technology, 2012. (in Chinese)
[25]王新岗. 三自由度气浮台涡流力矩的研究[D]. 哈尔滨工业大学, 2006.
WANG X G.StudyofVortexMomentoftheThreeDegreeofFreedomAirBearingTable[D]. Harbin: Harbin Institute of Technology, 2006. (in Chinese)
[26]任迪. 三轴气浮台气体球轴承静态特性及涡流力矩的研究[D]. 哈尔滨工业大学, 2009.
REN D.StudyonStaticCharacteristicsandVortexTorqueofSphericalAirBearingsforThree-axisTest-bed[D]. Harbin: Harbin Institute of Technology, 2009. (in Chinese)
[27]林振华, 董云峰. 基于单轴气浮台摆动特性的调节平衡方法[J]. 科技导报, 2010, 28(2):46-49.
LIN ZH H, DONG Y F. Balance of single axis air bearing table based on its swing characteristics [J].Science&TechnologyReview, 2010, 28(2):46-49. (in Chinese)
[28]张勇, 孙宁, 曹国华. 单轴气浮台低速自由转动规律分析[J]. 工程设计学报, 2009, 16(6):436-439.
ZHANG Y, SUN N, CAO G H. The regularity analysis of low velocity free rotation of single axis air bearing table [J].JournalofEngineeringDesign, 2009, 16(6): 436-439. (in Chinese)
[29]杜建军,姚英学,高栋,等. 气体静压轴颈-止推串接型轴承涡流力矩的有限元分析[J]. 润滑与密封, 2005, (3): 57-59.
DU J J, YAO Y X, GAO D,etal.. A numerical analysis of vortex torque of externally pressurized gas journal thrust bearings [J].LubricationEngineering, 2005, (3):57-59. (in Chinese)

刘延芳(1986-),男,河南叶县人,博士后,讲师,硕士生导师,2014年于哈尔滨工业大学获得博士学位,主要从事航天器机电一体化及其地面试验技术、航天器及其结构动力学与控制、智能材料及智能结构动力学建模及控制。E-mail: lyf04025121@126.com

刘兴富(1990-),男,山东潍坊人,硕士,研究实习员,2013年于哈尔滨工业大学(威海)取得学士学位,2015年于哈尔滨工业大学取得硕士学位。主要从事空间机构设计,空间飞行器地面物理仿真试验。
(版权所有未经许可不得转载)
Design of supper low disturbance torque air bearing table with active compensation
LIU Yan-fang1*, LIU Xing-fu1, QI Nai-ming1, ZHANG Liu2
(1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China;2.ShanghaiEngineeringCenterforMicrosatellites,Shanghai201210,China;3.CollegeofInstrumentationandElectricalEngineering,JilinUniversity,Changchun130061,China)*Correspondingauthor,E-mail:lyf04025121@126.com
As the output moments of reaction wheels for micro-satellites and nano-satellites are the same as the disturbance moment of an Air Bearing Table (ABT), the attitude dynamic simulation and ground test of the micro-satellites and nano-satellites can not be implemented directly by the ABT. To solve the problems, an active compensation ABT with a supper low disturbance moment was designed and developed. The disturbance moment of the ABT was analyzed and three kinds of methods to reduce the disturbance moment were proposed. Firstly, the viscous damping moment was reduced by optimizing design; Then, the vertex moment was reduced by setting sloping slant orifices to generate an active vertex to balance the inherent vertex of the air bearing, and to reduce the inherent vertex moment. Finally, the swing characteristics of air bearing was used to implement high precise balance adjustment and to reduce the gravity induced moment. A measuring device of micro-moment was designed and the remaining vertex moment was measured and the measuring results were used to direct the compensation of the vertex moment and gravity induced moment. Experimental results indicate that the disturbance moment of the ABT is smaller than 5×10-5Nm, which is less than the minimum output moment(1×10-4Nm) of the reaction wheel. Obtained results satisfy the requirements of the ground simulation of attitude dynamics and the control of micro-satellites and nano-satellites.
micro-satellites and nano-satellite; air bearing table; disturbance torque; active compensation
2016-03-25;
2016-05-07.
微小型航天器技术国防重点学科实验室开放基金资助项目(No. HIT.KLOF.MST.201507);中央高校基本科研业务费专项基金资助项目(No. HIT.NSRIF.201622)
1004-924X(2016)10-2432-10
V448.22;V474
Adoi:10.3788/OPE.20162410.2432
