采用红外扫描激光与超声技术的室内空间定位
2016-11-15于之靖诸葛晶昌
吴 军,于之靖,诸葛晶昌,薛 彬
(1.中国民航大学 航空工程学院,天津 300300;2.中国民航大学 电子信息与自动化学院,天津 300300;3.天津大学 海洋科学与技术学院,天津 300072)
采用红外扫描激光与超声技术的室内空间定位
吴军1*,于之靖2,诸葛晶昌2,薛彬3
(1.中国民航大学 航空工程学院,天津 300300;2.中国民航大学 电子信息与自动化学院,天津 300300;3.天津大学 海洋科学与技术学院,天津 300072)
为了解决当前定位方法无法兼顾高精度、高集成度、多任务性、实时性测量的问题,提出了一种基于激光测距原理的室内空间定位系统。该方法通过单台测量基站向被测空间内发射旋转扫描红外激光信号以及超声脉冲信号,采用旋转扫描红外激光形成多平面约束,采用高精度超声测距形成距离约束。然后,将多平面约束与距离约束相耦合,得到测量靶标的非线性约束方程组。最后,利用非线性最优化算法解算得到测量靶标的精确空间坐标。该方法仅采用单台测量基站即可完成全周向、多任务实时性的空间测量与定位。采用激光跟踪仪系统作为比对基准验证了本方法的测量精度及可靠性。结果显示,在5 m的被测空间内,其定位测量误差在0.3 mm以内,可满足大多数工业测量应用场合需求。与传统的室内定位方法相比,本方法极大地提高了测量系统的集成度以及测量效率,为全站式空间定位方法提供了新的思路。
室内空间定位;扫描红外激光;超声测距;激光测距;非线性约束
1 引 言
室内定位方法广泛应用于工业制造领域中的大型零部件定位[1]、移动机器人导航[2]以及产品尺寸的精密测量[3]。基于光学原理的测量方法以其高精度、高稳定性而在室内定位方法中占据着主导地位[4],如激光跟踪仪系统、激光雷达系统、经纬仪系统、视觉测量系统和室内GPS系统等。室内定位方法一般朝着高精度、高集成度、高效率、多任务性、实时性的方向发展[5],而现有的方法均存在着一定的局限性。激光跟踪仪[6]、经纬仪[7]由于光束的准直性强而无法实现多任务实时测量,测量效率较低;视觉测量系统[8]、室内GPS系统的集成度较低[9-10],在现场应用时须进行复杂的外部方位标定才能解算接收靶标的空间坐标,费时费力。为了解决这些问题,研究人员在多站式视觉测量系统和室内GPS系统的基础上,通过在接收靶端增加预先标定的几何约束条件[11-12],实现了单测站的空间定位与坐标测量;然而为了提高测量精度,必须增大接收端靶标的几何尺寸以增强其几何约束,这就对设备的便携性及易用性提出了严峻的挑战。因此,为了拓展光学类室内空间定位系统的应用范围,有必要研究一种可实现较高精度、多任务实时性测量的全站式室内空间定位方法。
本文提出了一种基于红外扫描激光与超声相结合的室内空间定位方法。该方法采用单台测量基站向被测空间发射旋转扫描的红外平面激光束以及超声脉冲,在靶标端安装光电接收器以及超声接收器来接收测量基站所发射的声光信号,通过旋转扫描的红外激光平面测量靶标接收器相对于基站坐标系的平面约束方程,最后通过超声测距得到靶标接收器与基站坐标系的距离约束方程,从而建立非线性约束方程组,并采用非线性最优化算法解算得到靶标接收器的空间坐标。与传统的室内空间定位方法相比,本文提出的方法仅采用单台测量基站即可实现接收器靶标的测量与定位,避免了繁琐的现场标定过程,且测量靶标由于具有距离方向的约束,无需通过增大靶标的方式提高测量精度,因此实现了测量靶标的轻量化与小型化,有效地改善了当前定位方法的局限性。
2 测量系统数学模型
为实现单站式、高精度、多任务实时性测量,定位系统由测量基站与接收靶标组成。如图1所示,测量基站的核心部件为安装在基座上的旋转平台,平台上安装有两个红外激光发射器,随着平台的旋转,在测量空间内形成两束红外扫描平面激光。除旋转平台外,在基座上还装有同步脉冲激光发射器以及超声脉冲发射器,分别用来提供同步时间基准和发射超声脉冲。接收靶标上安装有两个光电接收器及一个超声接收器,光电接收器用于接收测量基站发射出的红外激光信号与同步脉冲激光信号,超声接收器用于接收超声脉冲信号。
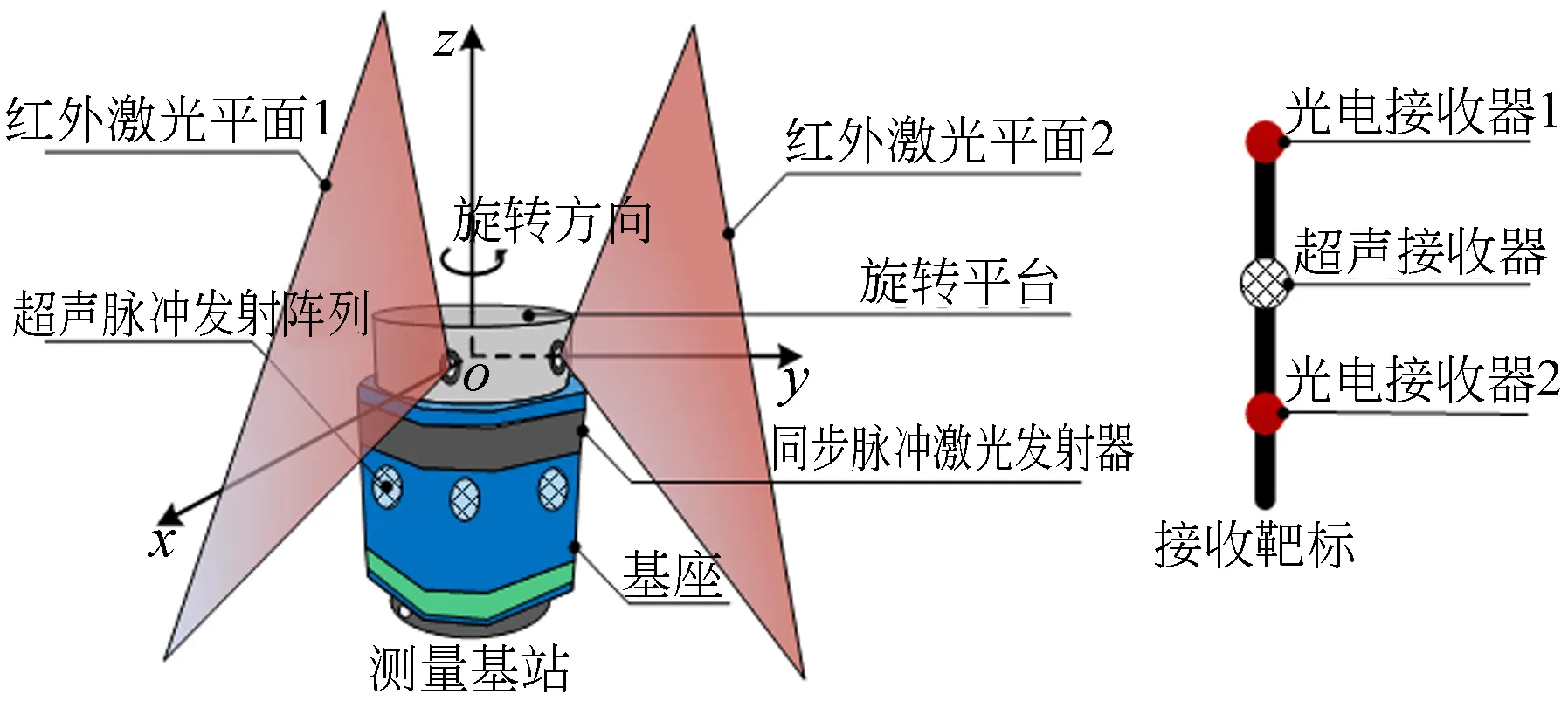
图1 基于红外扫描激光与超声相结合的室内空间定位系统组成示意图Fig.1 Components of indoor positioning system based on scanning infrared laser and ultrasonic technology
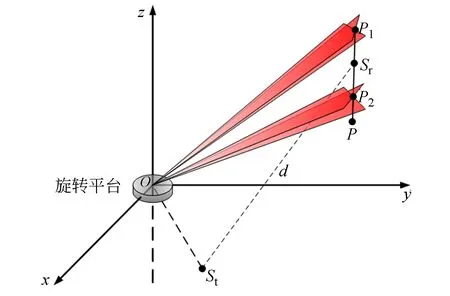
图2 测量系统数学模型Fig.2 Mathematical model of measurement system
该系统的测量原理为平面与距离的多约束耦合优化过程,示意图如图2所示。其中O-XYZ为测量基站坐标系,St、Sr分别为超声发射器与接收器,P1,P2为光电接收器。当光电接收器接收到激光信号时,表明激光平面刚好扫描到接收器中心,这样即可形成一个平面约束方程,因此每个光电接收器可形成两个平面约束方程,那么测量靶标上的两个光电接收器可形成4个平面约束方程。与此同时,超声测距系统可测得接收靶标与基站间的距离,形成一个距离约束方程。接收靶标上的光电接收器与超声接收器之间的位置可提前标定,一般令超声接收器位于2个光电接收器的中点处,因此,接收靶标本身可形成一个尺寸约束方程,如式(1)所示:

(1)

3 激光平面方程求解
测量基站发出的旋转红外激光平面扫描到光电接收器时,该激光平面通过接收器靶面的中心点,即形成一个过接收器几何中心的平面,这个平面方程的求解是本方法的核心,该方程求解的数学模型如图3所示。

图3 激光平面方程解算数学模型Fig.3 Mathematical model of laser planes
基站坐标系的z轴定义为旋转平台的旋转矢量方向,原点O定义为光平面1与z轴的交点,而平面1的初始位置与XOY平面的交线为坐标系x轴方向,y轴方向由右手坐标系原则确定。光平面1在初始位置的法向量为n10=(a10,b10,c10),因此,平面1在初始时刻的平面方程为:
a10x1+b10y1+c10z1+d10=0.
(2)
同理,平面2在初始时刻的平面方程为:
a20x1+b20y1+c20z1+d20=0.
(3)
在式(2)和式(3)中,d为平面方程在z轴的截距,根据坐标系的定义很明显平面1的截距等于0。而平面方程的其它参数均可在测量基站组装完成后通过标定得到。
当激光平面通过初始位置时,可触发同步脉冲激光器发射一束同步脉冲激光,光电接收器接收到同步脉冲激光信号后,接收处理器开始计时。当激光平面扫描到光电接收器位置后,处理器停止计时,这样即可得到光平面的扫描时间t,激光平面扫描过的角度为:
θ=ωt,
(4)
其中ω为旋转平台的转速。这样,平面旋转过角度θ后的平面方程的法向量n1θ=(a1θ,b1θ,c1θ)可通过旋转矩阵表示,即有:

(5)
在旋转过程中,平面的截距d不会变,因此通过解算光电接收器测量得到的激光平面旋转时间可以求得旋转后的平面方程。
4 约束方程的求解
约束方程组(1)中的激光平面方程可通过上文描述的方法解出,而距离约束方程可通过超声传感器测量得出。与传统的激光测距方法相比,超声波具有良好的准直性和稳定的发散角,因此通过环形阵列的安装方式可以实现全周向测量。此外,由于超声信号频率高达50 kHz,故采用适当的信号处理方式及一定的声速补偿方法可以达到较高的测量精度,这在笔者的前期研究中已有相关论述,本文不再赘述[13]。
方程组(1)为非线性方程组,为了求解该方程组,一般采用Levenberg-Marquardt迭代法寻找最优解[14]。不过该方法对迭代初值的选取要求较高,一旦初值选取不当易使迭代方向出错,导致方程组的解不收敛,因此,需采用适当的方法获取方程组的近似解作为迭代初值。
为了获取精确的初值,接收靶标在使用过程中应尽量保持垂直状态,如图4所示。其中,OP1,OP2分别为两个激光平面扫描过接收器P1,P2所形成的交线。由上节可知,平面1截距d1=0,平面2截距d2可在基站装配过程中调节,使其近似等于0,故两条交线均近似通过原点,而交线的方向向量r1和r2可通过上节介绍的平面法向量求解方法得出,即交线的方向向量等于平面法向量的叉乘积,如式(6)所示:
(6)
其中:nij为第j个接收器上接收到的第i个激光平面方程的法向量,该法向量可通过式(5)求得。

图4 迭代初值求解示意图Fig.4 Solution scheme of initial iteration values
由图4可知,接收器P1,P2近似竖直方向,故O,P1,P2近似位于同一平面,则由图中的几何关系易得到:
(7)

(8)
由式(8)得到的P1,P2的近似空间坐标可作为非线性方程组(1)求解的近似解。由理论分析和Matlab仿真可知,接收靶标与竖直线夹角在10°以内时,本方法均可得到较为精确的近似解,即采用L-M迭代算法可求得方程组(1)的精确解。
5 实验验证
为了验证本系统的有效性,本文设计了相关实验。实验分为两部分:首先标定发射基站上超声脉冲发射器相对于基站坐标系的位置,然后验证测量靶标的测量精确性。
发射基站与接收靶标的实物图分别如图5和图6所示,超声脉冲发射器固定于发射基站的基座上。其中,位于旋转平台上的红外激光发射器可发射波长为850 nm,功率为50 mW的扇形平面激光,超声发射与接收模块采用了美国SensComp公司的600系列仪表级超声传感器,其响应频率为50 kHz,带宽为20 kHz,发散角可达15°,而接收靶标端的光电接收器采用了德国First Sensor公司的光电传感器,其峰值频率为900 nm。

图5 发射基站实物图Fig.5 Photo of measurement base station

图6 接收靶标实物图Fig.6 Photo of target bar
为了标定靶标与基站的相互位置关系,超声发射器与两个光电接收器固连在一起,首先可通过影像测量仪测得光电接收器与超声发射器间的位置关系,然后通过多基站组成测量网可标定基站上光电接收器的坐标[15],从而标定得出超声发射器在发射基站坐标系下的位置。接收靶上的光电接收器与超声接收器也可通过影像测量仪标定。为了解算方便,可通过六自由度平台将超声接收器调整至两个光电接收器的中点处。标定结果显示:超声发射器在基站坐标系下的坐标为(-130.88 mm,13.13 mm,-222.08 mm)。
为验证系统的空间坐标测量精确度,以激光跟踪仪为比对基准,为了避免激光跟踪仪坐标系与本系统测量坐标系之间因坐标系转换而引入的测量误差,本实验直接对两系统所测得的距离进行比对验证。具体方法为将激光跟踪仪的接收靶球与本系统的测量靶标固定在一起,然后沿着直线导轨x,y,z3个方向平移靶标,最后分别用激光跟踪仪与本测量系统测量靶标的移动距离,并进行精度对比,实验验证平台如图7所示。

图7 实验验证平台示意图Fig.7 Diagram of verification experiment platform
发射基站激光初始平面参数可通过高精度空间测量场标定得出,标定结果如表1所示。
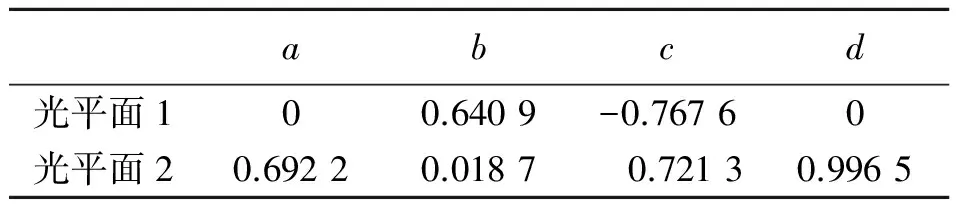
表1 基站激光平面参数
靶标在精密长导轨上从距离基站5 m处移动至距离基站4 m处,共测量10段距离,每段距离约为100 mm,然后分别采用两种测量系统测得靶标的相对移动距离,测量结果如图8所示。

图8 测量系统的偏差和标准差Fig.8 Deviations and standard errors of proposed indoor positioning system
图8显示了以激光跟踪仪测量结果为基准值的本测量系统的测量偏差及标准差,分别为x,y,z3个方向,其中红色曲线为测量偏差,绿色曲线为测量标准差。从实验结果可以看出,x,y,z轴方向的最大偏差分别为0.26,0.12,0.14 mm,而最大标准差分别为0.41,0.14,0.10 mm,可见x轴方向的偏差与标准差均显著大于另两轴的偏差与标准差。这是由于x轴方向与测量系统超声脉冲发射方向大致重合,故x轴方向的偏差与标准差主要受限于超声测距的测量精度与测量不确定度,而另两轴则主要受限于激光平面扫描角的测量精度与测量不确定度。由实验结果可知,该系统的测量精度可满足常见的室内空间定位场合,有较高的精确性与有效性,并且扫描激光信号与超声信号均在接收靶端通过处理器进行信号处理与坐标解算,与发射站无关。 当有多个接收靶标同时工作时,每个靶标的接收信号均可通过独立的信号处理器进行的处理,因此本系统可实现多任务实时测量。
6 结 论
本文主要提出了一种新型的室内空间定位系统,采用旋转扫描红外激光形成多平面约束,并与高精度超声测距所形成的距离约束相耦合,得到测量靶标的非线性约束方程组。通过限定测量靶标的空间姿态,使其近似于垂直方向,并采用空间角度交汇法求解得到测量靶标的近似解,再以此近似解为初值采用L-M迭代法解算该非线性方程求得最优解,最后通过预先标定得到的靶标自身的几何约束关系得到靶标的空间坐标,实现空间定位的目的。为了验证本方法的测量精度及可靠性,采用激光跟踪仪系统作为基准进行了对比实验。实验结果表明,本文提出的室内空间定位方法的测量偏差最大为0.26 mm,可满足大多数工业测量领域室内空间定位场合,例如室内AGV小车导航、工业机器人定位、大型零部件对接等的要求。与传统方法相比,本文方法兼具多任务性、实时性、便携性等优点,为全站式空间定位方法提供了新的思路。
[1]任永杰, 薛彬, 杨凌辉,等. 工作空间测量定位系统加权问题研究[J]. 红外与激光工程, 2015,44(2): 668-672.
REN Y J, XUE B, YANG L H,etal.. Study on the problem of weighting for the workspace measuring and positioning system[J].InfraredandLaserEngineering, 2015,44(2):668-672.(in Chinese)
[2]HUANG ZH, ZHU J G, YANG L H,etal.. Accurate 3-D position and orientation method for indoor mobile robot navigation based on photoelectric scanning[J].IEEETransactionsonInstrumentationandMeasurement, 2015, 64:2518-2529.
[3]董登峰, 周维虎, 纪荣祎,等. 激光跟踪仪精密跟踪系统的设计[J]. 光学 精密工程, 2016,24(2): 309-318.
DONG D F, ZHOU W H, JI R Y,etal.. Design of precise tracking system of laser tracker[J].Opt.PrecisionEng., 2016,24(2):309-318.(in Chinese)
[4]王锐. 激光距离选通成像门宽对图像信噪比影响[J]. 中国光学, 2015,8(6): 951-956.
WANG R. Effect of gate width of laser range gating imaging on image SNR[J].ChineseOptics, 2015,8(6):951-956.(in Chinese)
[5]任永杰, 邾继贵, 吴军,等. 采用互扫描法自动标定工作空间定位系统[J]. 光学 精密工程, 2015,23(3): 609-616.
REN Y J, ZHU J G, WU J,etal.. Self-calibration of workspace measurement and positioning system by using inter-scanning[J].Opt.PrecisionEng., 2015,23(3): 609-616.(in Chinese)
[6]NUBIOLA A,SLAMANI M, JOUBAIR A,etal.. Comparison of two calibration methods for a small industrial robot based on an optical CMM and a laser tracker[J].Robotica, 2014, 32(3): 447-466.
[7]WU B, WANG B. Automatic measurement in large-scale space with the laser theodolite and vision guiding technology[J].AdvancesinMechanicalEngineering, 2013, 8: 533-542.
[8]TIAN L, ZHU W, LI K J. A camera calibration method for large field vision metrology[C].IEEEInternationalConferenceonMechatronicsandAutomation,Beijing, 2015: 2632-2637.
[9]薛彬, 邾继贵, 郑迎亚. 工作空间测量定位系统最佳测量点的确定方法[J]. 红外与激光工程, 2015,44(4): 1218-1222.
XUE B, ZHU J G, ZHENG Y Y. Determination method of optimal measurement point of workspace measuring and positioning system[J].InfraredandLaserEngineering, 2015,44(4):1218-1222.(in Chinese)
[10]杨凌辉, 邾继贵, 魏振忠, 等. 工作空间测量定位系统定向参数修正方法[J]. 红外与激光工程, 2012, 41(6): 1629-1634.
YANG L H, ZHU J G, WEI ZH ZH,etal.. Correction method for orientation parameters of workspace measurement positioning system [J].InfraredandLaserEngineering, 2012, 41(6):1629-1634. (in Chinese)
[11]LIU ZH X, ZHU J G, YANG L H,etal.. A single-station multi-tasking 3D coordinate measurement method for large-scale metrology based on rotary-laser scanning[J].MeasurementScienceandTechnology, 2013, 24(10): 47-52.
[12]LIU SH, ZHANG H L, DONG Y H,etal.. Portable light pen 3D vision coordinate measuring system-probe tip center calibration[J].MeasurementScienceReview, 2013, 13(4): 194-199.
[13]WU J, ZHU J G, YANG L H,etal.. A highly accurate ultrasonic ranging method based on onset extraction and phase shift detection[J].Measurement, 2014, 47: 433-441.
[14]赵春阳, 赵怀慈. 结合特征定位噪声表征的单应矩阵精确鲁棒估计[J]. 光学 精密工程, 2015,23(8): 2357-2368.
ZHAO CH Y, ZHAO H C. Accuracy and robust estimation of homography based on feature point location noise[J].Opt.PrecisionEng., 2015,23(8):2357-2368.(in Chinese)
[15]ZHAO Z Y, ZH J G, XUE B,etal.. Optimization for calibration of large-scale optical measurement positioning system by using spherical constraint[J].JournaloftheOpticalSocietyofAmericaA:OpticsandImageScience,andVision,2014, 31(7): 1427-1435.

吴军(1986-),男,山西繁峙人,博士,讲师,2009年、2014年于天津大学分别获得学士、博士学位,主要从事大尺寸光电检测技术、视觉测量和超声检测的研究。E-mail: j_wu@cauc.edu.cn。

于之靖(1963-),男,河北沧州人,教授,博士生导师,1984年于河北科技师范学院获得学士学位,2004年于哈尔滨工业大学获得博士学位,主要从事计算机视觉、图像处理、光纤传感技术、自动化测试技术、视觉测量与图像处理等研究。E-mail: hit_yu@126.com。
(版权所有未经许可不得转载)
Indoor positioning by using scanning infrared laser and ultrasonic technology
WU Jun1, YU Zhi-jing2, ZHUGE Jing-chang2, XUE Bin3
(1. College of Aeronautical Engineering, Civil Aviation University of China, Tianjin 300300, China;2.CollegeofElectronicInformationandAutomation,CivilAviationUniversityofChina,Tianjin300300,China;3.SchoolofMarineScienceandTechnology,TianjinUniversity,Tianjin300072,China)*Correspondingauthor,E-mail:j-wu@cauc.edu.cn
Because traditional positioning methods can not satisfy its requirements for high accuracy, high integration, multi-task and real-time, an indoor positioning method by using laser ranging technology is proposed for industrial manufacturing fields. This method transmits rotation scanning plane laser signals and ultrasonic pulse signals through a measurement base station. It uses rotation scanning plane infrared laser to form a multi-plane constraint, and uses high precision ultrasonic ranging to form a distance constraints. Then the plane constraint and distance constraint are fused to obtain a nonlinear constraint equation set. Finally, the nonlinear optimal algorithm is used to calculate and obtain the accurate 3D coordinates of the target bar. The method achieves omnidirectional, multi-task and real-time positioning by using a total station. A laser tracker is taken as standard to verify the measuring accuracy and reliability of the proposed method. The experiment results show that the positioning measurement error of the method is less than 0.3 mm within a 5 m range, which meets the most industrial fields. As compared with that of the traditional indoor positioning methods, the proposed method improves the integration level and measuring efficiency and provides a new way for whole station positioning methods.
indoor positioning method; scanning infrared laser; ultrasonic ranging; laser ranging; non-linear constraint
2016-07-11;
2016-08-12.
国家自然科学基金与民航联合基金资助项目(No.U1533111,No.U1333105);国家自然科学基金资助项目(No.61405246,No.61505140)
1004-924X(2016)10-2417-07
TN247
Adoi:10.3788/OPE.20162410.2417
