太阳影子定时定位算法研究
2016-11-14薛婧琛,周晨洁,陶舒婷等
太阳影子定时定位算法研究
太阳影子定位技术是由太阳光对人类生活的影响发展起来的。近年来,随着大数据信息时代的到来,该项技术可结合计算机软件,精准计算出时间与地理位置。
太阳影子长度的变化规律分析
研究思路
a .2015年10月22日即为当年第295天。
b .经纬度单位换算公式:

c.由于太阳与地球之间的距离和相对位置随时间在变化,当地真太阳时计算公式:

d .太阳高度角∂纬度φ和赤玮角δ
计算结果与结果分析
根据太阳赤纬角公式:

计算出该日的太阳赤纬角:

真太阳时与钟表指示的时间(平太阳时)之间总会有所差异,它们的差值为时差,即:=

得出影长:

影子定位及确定直杆所处地点
太阳高度角∂、太阳赤玮角δ、太阳时角t、物体所在地纬度φ有如下函数关系:

时角t 与经度φ0的关系:


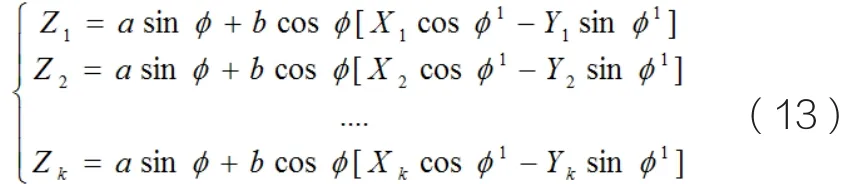
在上式中,太阳赤纬角δ由时期N决定, 在求解影子定位中为常数,而在确定直杆所处地点与时间中为变量。将sinδ简记为a ,cosδ简记为b ,得到:为一个由确定的参数,记为Xi;把记为Yi,把sin∂i简写为Zi,即:

第i 行与第i-1行作差来消除未知量。作差可得到:

上式转化为:

M为设立的一个量,变量是与经度φ0有关的φ1和与∂i i有关的Zi,即Mi 的方程如下:

太阳高度角:

代入式子,有:
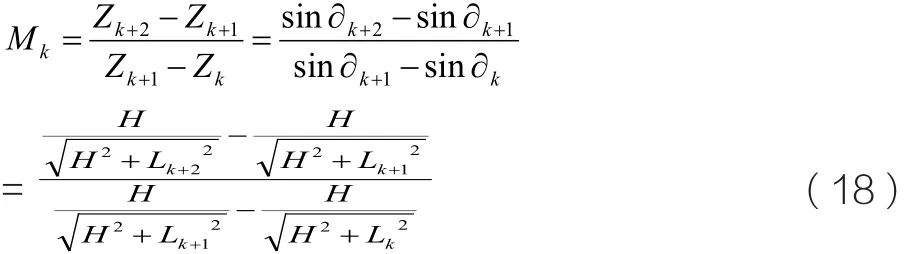

由式(18)立杆高度H已知,即高度角α可知:

易得每两组数据(xi,yi)和(xi+1,yi+1)可以确定一组经纬度φ和φ1。计算出该物体所在地经纬度数据为:φ1=E108.88,φ=N19.454,位于海南岛西海岸附近,地理位置为海南省东方市。
确定视频拍摄地点
成像原理
相机的成像假定为理想状态下的针孔成像模型。
世界坐标系(Ow;Xw,Yw,Zw):以杆底为坐标原点Ow,直杆所在直线为Yw轴,地平面所在平面为XwOwZw面。
相机坐标系(Oc; Xc, Yc, Zc):以相机光心Oc点为坐标原点,XcOcYc面与成像平面平行,Zc轴为相机的光轴,与图像平面垂直。设P 点在该坐标系下坐标为(x, y, z)。
像平面坐标系(o'; x', y '):以像所在平面取坐标原点,与直杆平行所在直线为x轴,建立平面直角坐标系
设点P 在世界坐标系下坐标为(X, Y, Z),对应在相机坐标系下的坐标为(x, y, z),像平面上的坐标为(x', y'),世界坐标系和相机坐标系的齐次坐标分别为(X, Y, Z ,1)T与(x, y, z ,1)T,则:

其中R 和T 为相机的标定参数。R 为正交矩阵,称为坐标系之间的旋转矩阵,则取单位矩阵T 为相机坐标系和世界坐标系的平移向量(x0,y0,z0)T。
模型建立
设f为该相机像素,即为图OcO'物理距离。则像素、世界坐标系和像平面坐标系的关系:

写成矩阵形式:

坐标原点可能存在平移,则可建立相机坐标系与世界坐标系的关系:

图1 相机成像原理

结合式子,像平面与现实世界的对应关系:

模型的求解与分析
模型一:

取XwOwZw平面,即Y=0,则有:

由于物体在相平面中的长度l'和现实中的长度l的比值等于焦距f 和相机坐标系与世界坐标系Z 轴方向的平移距离z0,即:

得到坐标系平移参数x0y0:

即:

测出图像中直杆的顶点坐标为(x1',y1'),由:

计算出z0。即可求出直杆所在地的地理位置和时间。
模型二:
即可求出直杆的影长,从而确定所在的时间和地理位置。
结语
三维立体几何模型建立在数学公式及定理之上,具有严密的逻辑推理,思路清晰。本文所解决的问题可考虑使用新的算法来进行优化,例如蚁群算法、模拟退火算法等,精确计算经纬度数据。
10.3969/j.issn.1001- 8972.2016.21.003
