多体动力学仿真分析在消防车变幅机构计算中应用
2016-11-14张军高志刚白冰
张军 高志刚 白冰
(徐工消防安全装备有限公司,徐州 221004)
多体动力学仿真分析在消防车变幅机构计算中应用
张军高志刚白冰
(徐工消防安全装备有限公司,徐州 221004)
消防车臂架变幅机构计算主要是铰点力求解及变幅缸行程的确定,若采用经典理论计算,是一个比较繁琐的过程,需要建立复杂的数学模型,而且机构在运动过程中,力臂也在不断变化,需要选取多个典型工况进行计算对比分析,寻求最大解,费时费力。而应用ADAMS多体动力学仿真软件很容易就解决了这些问题,只要把模型建立好,定义模型质量,添加约束和载荷,通过仿真分析,就能提取想要的力、位移、角度、速度、加速度曲线。
机构计算;数学模型;力臂;ADAMS;多体动力学;仿真
引言
消防车臂架变幅机构是单自由度平面六连杆运动机构,如图1所示:其工作原理是通过变幅缸1的伸缩带动连杆机构运动,从而实现驱动折叠臂2相对于伸缩臂5展收作业的。

图1 臂架变幅机构示意图
1 模型建立
将PRO-E变幅机构模型导入到ADAMS平台中,如上图所示,根据模型的运动关系定义约束和驱动。

图2 臂架变幅机构分析模型图
2 定义质量和载荷
将各部件的质量定义到机构各杆件中,折叠臂600 kg,变幅缸180 kg水炮喷射反力2 000 N,喷射角度斜向上与水平成30°。

图3 油缸长度随时间变化曲线
3 分析过程
(1)根据设定的变幅角度来求解油缸的全伸长度。假设臂架等角速度变幅20 s实现折叠臂相对伸缩臂0~175°变幅来进行仿真分析,可求解变幅缸的长度随时间变化曲线,如图3所示,软件同时提供图表数据转化功能,从而得到油缸的行程为1 615 mm~2 732 mm。

图4 臂架变幅角度、角速度、角加速度随时间变化曲线

图5 伸缩臂0°时油缸受力随时间变化曲线
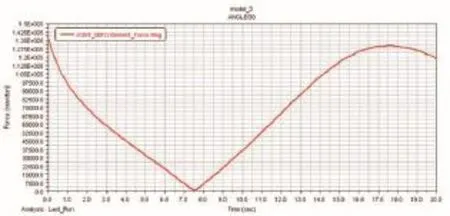
图6 伸缩臂30°时油缸受力随时间变化曲线

图7 伸缩臂60°时油缸受力随时间变化曲线

图8 伸缩臂83°时油缸受力随时间变化曲线

图9 非喷水工况伸缩臂0°时油缸受力随时间变化曲线
(2)因变幅机构是通过油缸伸缩来驱动的,油缸运动近似匀速直线运动。因此,仿真分析油缸受力则需通过给定油缸速度,从而求解臂架变幅角速度、角加速度以及各铰点的受力,根据油缸行程求解出20 s折叠臂变幅油缸伸缩速度:(2 732-1 615)/20=55.85 mm/s,绘制臂架变幅角度、角速度及角加速度如下图所示:其中红线为角度曲线,蓝色虚线为角速度曲线,粉色虚线为角加速度曲线,从图中可看出初始加速度较大,5 s后趋平缓,而臂架消防作业伸缩臂和折叠臂夹角通常大于90°,此时臂架变幅加速度小,臂架微动性、稳定性好。
(3)连杆机构确定后,给定油缸初始速度,那么臂架变幅的角速度和角加速度就定了,跟伸缩臂变幅角度无关。但油缸力的大小与伸缩臂与水平面的角度有很大关系,通过旋转重力坐标来模拟伸缩臂不同角度下的折叠臂变幅工况。得到0°、30°、45°、60°、83°的变幅缸受力曲线分别为:
从图5~图8中可看出,当伸缩臂初始角度为0°时,油缸受力较大,此时为拉力,大概15.5 t,随着伸缩臂角度的增加,油缸初始力越来越小,因为折叠臂重力的力臂在不断变小。第一个拐点出现是在折叠臂与水平面垂直的情况,此时油缸力接近为0,随着折叠臂的举升,油缸力逐渐变大,此时油缸为推力,得出最大推力为13 t,其他几个角度下最大推力和拉力都小于0°工况。因此得出油缸的最大推力为13 t。
因伸缩臂0°且伸缩臂与折叠臂夹角也为0°的工况是收臂工况,此时不喷水作业,因此计算油缸最大拉力时,仿真分析需去掉水炮喷水载荷,得到的油缸力曲线如图9所示:此时油缸最大拉力为12 t。
4 结束语
以上分析结果可以为消防车变幅机构的结构件有限元分析提供载荷参考,为油缸设计提供计算依据。ADAMS多体动力学仿真分析软件应用,大大提高了消防车机构计算的效率。
[1] 陈立平.机械系统动力学分析及ADAMS应用教程.清华大学出版社,2005
[2] 王国强.虚拟样机技术及其在ADAMS上的实践.西北工业大学出版社,2002
