基于RFID技术的方向感知方法研究
2016-11-11郭凤鸣何怡刚
郭凤鸣,李 兵,,何怡刚
(1.湖南机电职业技术学院,长沙 410151 2.合肥工业大学 电气与自动化工程学院,合肥 230009)
基于RFID技术的方向感知方法研究
郭凤鸣1,李兵1,2,何怡刚2
(1.湖南机电职业技术学院,长沙410151 2.合肥工业大学 电气与自动化工程学院,合肥230009)
目标物方向感知是供应链及设备管理等射频识别(Radio Frequency Identification,RFID)应用领域中亟需解决的问题.基于RFID工作原理及天线散射理论,给出了超高频(Ultra High Frequency,UHF)RFID系统链路模型.利用天线极化分集理论,提出了一种基于RFID技术的目标物方向感知方法.该方法是给目标物贴附两个标签,通过改变阅读器天线极化方向获取分集接收信号强度,并对所得数据进行统计分析,根据分析结果估计目标物方向.在室内开阔环境下对该方法进行了测试.测试结果表明,该方法对目标物方向平均估计误差为10.1°.
方向感知;射频识别;极化分集;统计分析
0 引 言
随着普适计算研究的不断深入及发展,更多的应用需要知道目标的位置信息,基于位置的服务已经成为了一个很重要的研究方向和热点问题.目前常用的全球定位系统(Global Positioning System,GPS)精度不高(误差为米数量级),且室内环境存在电磁干扰及屏蔽,无法满足用户的室内定位需求.而基于无线传感网络、红外线、超声波及RFID等技术的方法正快速发展起来,已成为室内定位的主要研究方向[1].在物流、供应链及设备管理等应用领域中,除了要对目标物进行识别外,还需完成目标物的方向感知[2].文献[3]利用极化分集方法,可获取极化雷达系统目标物及环境信息,但并未明确涉及RFID技术.文献[4]基于标签天线极化分集方法,通过给目标物贴附天线极化方向正交的两个标签,利用标签天线的增益差感知目标物方向.文献[3-4]未考虑极化失配对方向感知结果的影响.文献[5]考虑了极化失配因素,对极化分集方法进行了修正,提高了方向感知准确度.文献[6]利用RFID阅读器接收到的标签响应功率,通过构造贝叶斯来估计判断目标物方向,但该方法需要阅读器平均接收功率作为先验条件,限制了使用范围.
针对以上研究现状,本文给出了UHF RFID系统链路模型,提出了一种基于RFID技术及天线极化分集理论的目标物方向感知方法,并在开阔室内条件下对所提出的方法进行了测试.
1 无源UHF RFID工作原理及系统链路模型
典型无源UHF RFID系统模型及标签等效电路如图1所示,其中标签天线阻抗Za= Ra+jXa,标签负载阻抗Zl=Rl+jXl,V为标签天线感应电压,I为标签天线感应电流.无源UHF RFID系统通信链路分为阅读器至标签的前向链路及标签至阅读器的反向链路[7].
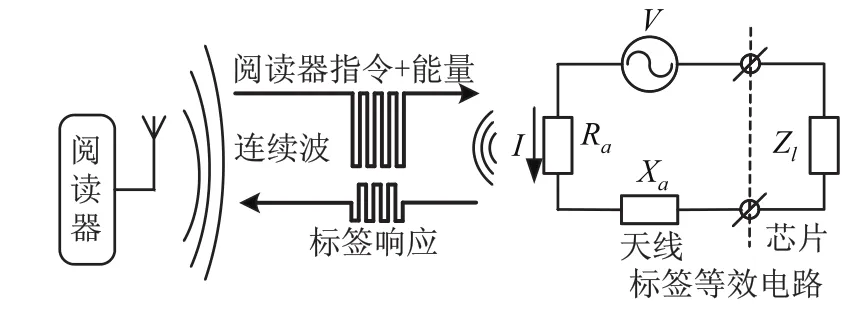
图1 UHF RFID系统示意图Fig.1 Diagram of UHF RFID system
假设前向链路中阅读器天线增益为Gr(θ,ϕ),阅读器发射功率为Pr-t,阅读器天线与标签天线间距为d,考虑实际应用场景中的多径效应,则标签天线接收功率

其中,λ为系统工作波长,χ为极化失配系数,Lp为多径损耗.定义反射系数Γ[8],



假设标签芯片灵敏度为Ptic-sen,则当Ptic-r≥Ptic-sen时标签能被激活.
反向链路中,标签天线反向散射功率

标签通过调节负载阻抗Zl=Zl1或Zl=Zl2,使得标签天线反向散射功率大小不同的电磁波,从而完成信号调制[9].阅读器天线接收功率

阅读器接收功率

2 基于RFID及天线极化分集的方向感知方法
本文基于天线极化分集方法,利用极化方向正交(水平极化及垂直极化)的线极化阅读器天线分别接收标签天线反向散射信号,使得阅读器对同一标签接收幅度和相位不同的两路信号,并对接收信号进行处理从而获取目标物方向.在目标物表面贴附两标签1和标签2,如图2所示.图2中,θ1和θ2为标签1和标签2与阅读器天线水平极化(H)方向的夹角;射线l为两标签夹角的角平分线;θ3为l与H方向的夹角.本文利用θ3表征目标物方向,所提方法要求标签1和标签2的夹角已知,为简化分析过程,假设两标签夹角为90°.
假设阅读器在其天线水平极化及垂直极化时接收标签1和标签2的反向散射信号为pij,i=H,V,j=1,2,考虑阅读器天线水平极化及垂直极化时的正交关系,pij可以表示为

实际应用中,阅读器接收信号由系统信道信号及环境噪声信号两部分组成.相较于标签反向散射信号,系统信道信号为相干信号,环境噪声信号为非相干信号.假设阅读器接收信号强度为s,则有

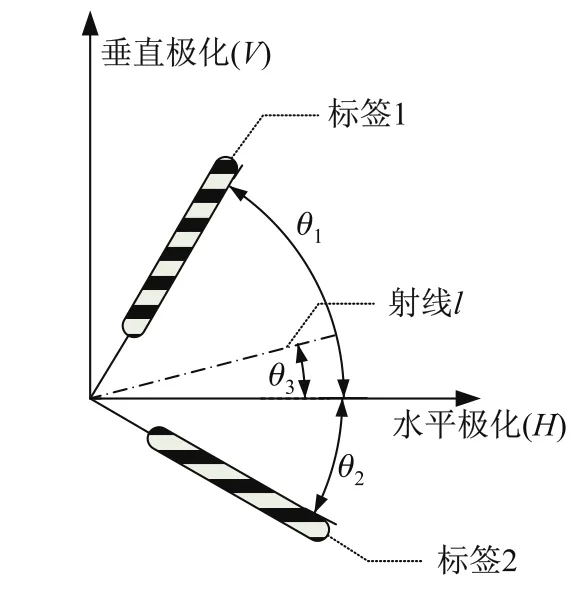
图2 标签布置示意图Fig.2 Layout diagram of UHF tags
其中,cij为系统信道系数,nij为噪声信号强度,sb为标签反向散射信号强度.由于本文不需要信道信号及环境噪声信号的先验条件,故可假设cij及nij为非相关分量,且二者服从二维高斯分布[5],即有



其中,阅读器接收标签反向散射平均功率

假设阅读器接收到N个标签反射信号样本,记为P1,2=[p1,2(1),p1,2(2),···,p1,2(n)].每个样本垂直分量和水平分量的比值决定于天线极化角度及标签天线方向.本文利用N个样本的平均值作为µij的估计值即有

作为µij的最大似然估计为关于µij的随即变量,其Cramer-Rao下界为的估计值为由于射线l为θ1及θ2的角平分线,故


3 实验结果及分析
实验采用Impinj公司的Speedway Revolution阅读器;采用根据ISO/IEC 18046-3标准自制的半波对称振子天线,谐振频率为915 MHz,增益为2.15 dBi,驻波比小于1.5;采用台湾FAVITE公司的FT-G1205型标签,有效识别距离为6 m.当识别范围大于6 m,可以采用多阅读器布置方案,本文主要考虑单阅读器布置情形.实验在7.5 m×6 m×3.5 m的开阔室内环境进行,系统工作频率为915 MHz,实验布置如图3所示.阅读器天线发射功率为30 dBm.定义估计误差
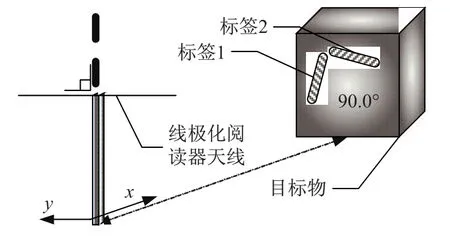
图3 实验布置示意图Fig.3 Layout diagram of experiment
实验固定θ1=30.0°,θ2=-60.0°,则θ3=-15.0°.阅读器天线与标签间距d以50 cm步长沿x轴从50cm增加至450cm.阅读器天线水平极化及垂直极化时,分别持续发射标签1和标签2查询指令10 s.测试结果如图4所示.由图4可见,当d=300 cm时,E3min=6.0°,估计结果最优;当d=250 cm时,E3max=32.0°,估计结果最差;系统平均估计误差E3=12.6°;当d≤200 cm时,E3≤11.0°.由式(6)和式(8)可知,Preceived随d增大而减小;当d较小时,相较于Preceived,噪声功率较小,Preceived成为影响E3的主要因素;当d较大时,相较于Preceived,噪声功率较大,噪声成为影响E3的主要因素.因此,当d较小时,对θ3估计结果更优.
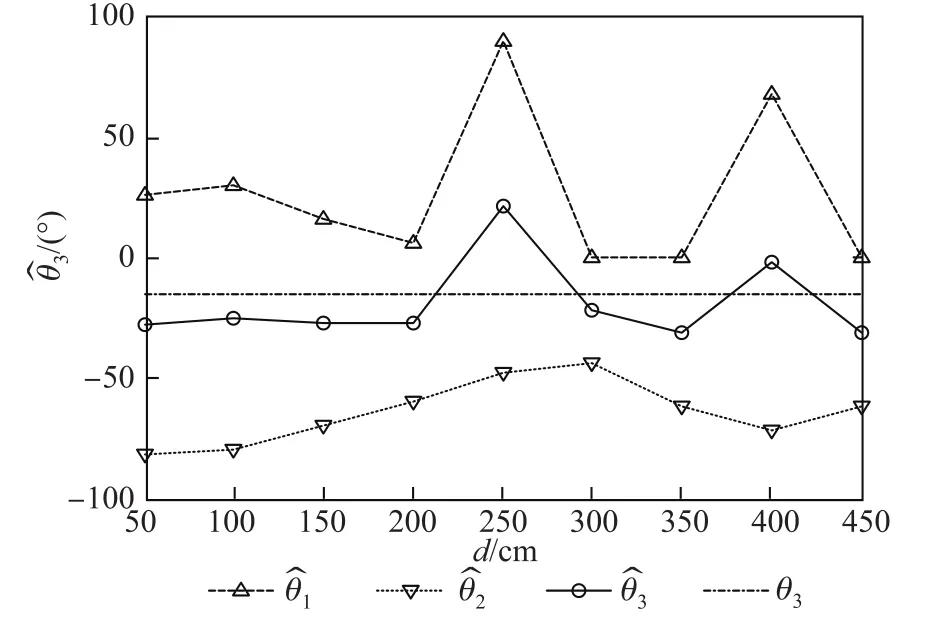
图4 3随d改变而变化Fig.4 3with d changing
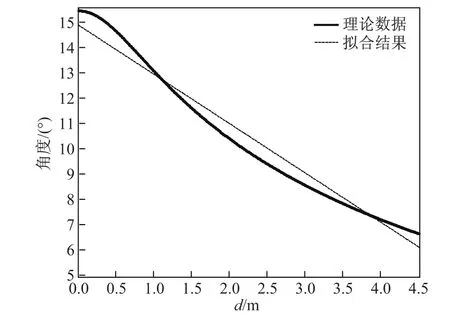
图5 理论角度误差及拟合结果Fig.5 Theoretical angle error and the fitting results
图5拟合曲线函数为θt=-2.075d+15.09,则公式(15)可以改进为

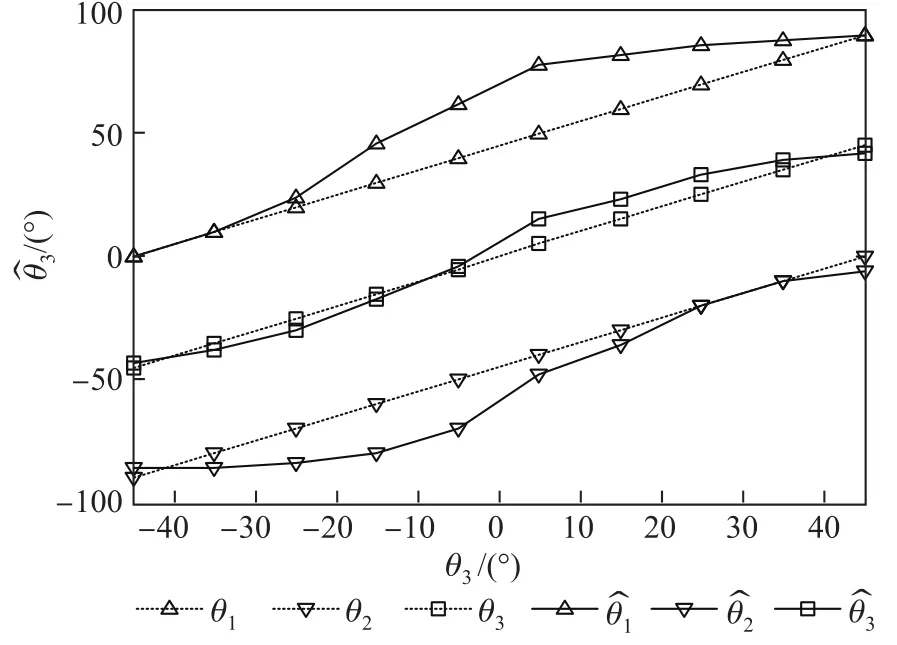
图6 3随θ3改变而变化Fig.6 3with θ3changing
在诸如物流、供应链等实际应用中,目标物常处于移动状态.实验测试图3中目标物沿与y轴平行方向移动对估计结果的影响.假设y=0 cm时,阅读器天线主瓣方向垂直于标签1和标签2贴附面,且此时目标物与阅读器天线间距为100 cm;目标物以20 cm步长沿与y轴平行方向从-160cm移动至160 cm,测试结果如图7所示.由图7可见,当目标物处于y=0 cm时对θ3估计结果较好;随着目标物向两侧移动,对θ3估计结果呈波动下降.这是由于当目标物处于y=0 cm时,阅读器天线主瓣方向与标签1和标签2贴附平面垂直;随着目标物向两侧移动,阅读器天线主瓣方向与标签1和标签2贴附平面不再构成垂直关系,使得从阅读器天线观测目标物方向与目标物实际方向存在较大误差,故对θ3的估计结果随阅读器天线主瓣方向与签贴附平面夹角的增大而减小.
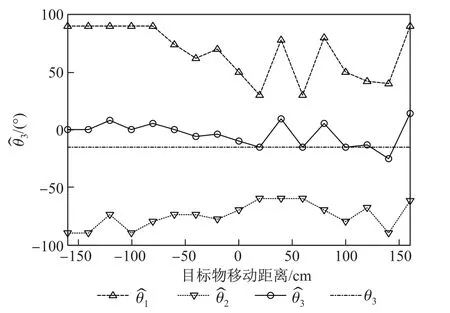
图7 3随目标物移动变化Fig.7 3with target moving
3.4实验结果比较
按照第3.1节-第3.3节实验布置,本文方法与文献[4-5]所提方法的方位角估计值E3平均误差如表1所示.

表1 方位角估计值平均误差比较Tab.1 The comparison of average error
由表1可见,本文所提方法的方位角估计值平均误差小于文献4和文献5所提方法.
4 结束语
本文介绍了UHF RFID系统工作原理,并给出了系统链路模型.结合RFID技术及天线极化分集理论,提出了一种新的目标物方向感知方法.测试结果表明,当阅读器天线与贴附面间距d小于4.5 m时,本文方法的平均估计误差为10.1°;当d不大于2 m时,平均估计误差小于11.0°;当阅读器天线与标签贴附平面间距较小(如1 m)时,本文方法在θ3∈(-45.0°,45.0°)范围内均取得较好估计结果.本文方法仅需在目标物增加一个标签,所需成本低且无需先验条件,易于快速部署.无源UHF RFID系统受相关标准、标签灵敏度及工作环境制约,系统读取距离较小.但随着技术进步及有源标签应用的推广,系统读取距离将逐渐增大.下一步的工作将研究目标物与阅读器天线间距较大时的目标物感知方法,从而建立完整的目标物方向感知模型.
[1]SHIREHJINI A A N,YASSINE A,SHIRMOHAMMADI S.An RFID-based position and orientation measurement system for mobile objects in intelligent environments[J].IEEE Trans on Instrumentation and Measurement,2012,61(6):1664-1675.
[2]KRIGSLUND R,POPOVSKI P,PEDERSEN G F.Orientation sensing using multiple passive RFID tags[J]//IEEE Antennas and Wireless Propagation Letters,2012,11(1):176-179.
[3]GIULI D.Polarization diversity in radars[J].Proceedings of the IEEE,1986,74(2):245-269.
[4]LEE T I,WANG Y E.On the limit of wireless communication capacity from polarization diversity[C]//Proceedings of the Antennas and Propagation Society International Symposium.IEEE,2006:137-140.
[5]BARRALET M,HUANG X,SHARMA D.Effects of antenna polarization on RSSI based location identification[J].International Conference on advanced Communication Technology,2009(1):260-265.
[6]KRIGSLUND R,POPOVSKI P,PEDERSEN G F,et al.Potential of RFID systems to detect object orientation[C]//Proceedings of the 2011 IEEE International Conference on Communications.IEEE,2011:1-5.
[7]杨公建,刘勇,韩建松,等.室内RFID网络跟踪算法研究[J].计算机工程与应用,2010,46(36):114-117.
[8]GRIFFIN J D,DURGIN G D.Complete link budgets for backscatter-radio and RFID systems[J].IEEE Antennas and Propagation Magazine,2009,51(2):11-25.
[9]NIKITIN P V,RAO K V S.Theory and measurement of backscattering from RFID tags[J].IEEE Antennas and Propagation Magazine,2006,48(6):212-218.
[10]NIKITIN P V,RAO K V S,MARTINEZ R D.Differential RCS of RFID tag[J].Electronics Letters,2007,43(8):431-432.
(责任编辑:李艺)
A novel orientation sensing method based on RFID technology
GUO Feng-ming1,LI Bing1,2,HE Yi-gang2
(1.Hunan Mechanical and Electrical Polytechnic,Changsha410151,China;2.School of Electrical and Automation Engineering,Hefei University of Technology,Hefei230009,China)
It is critical to sense orientation of target objects for radio frequency identification(RFID)applications,such as supply chain,equipment management,and so on.Based on the principles of ultra high frequency radio frequency identification(UHF RFID)and the theory of antenna scattering,a link budgets model of RFID is provided. Utilizing the technology of RFID and polarization diversity,a novel method for sensing the orientation is presented.The method requires standard RFID equipment and assumes that each object is attached by two RFID tags.Based on the reply,orientation of the target object is obtained by using of a simple statistical estimator. The performance of the method proposed is evaluated via experimental measurements,and the results show that the mean estimated error of orientation sensing is 10.1°.
signal strength of the tag
orientation sensing;radio frequency identification;polarization diversity;statistical analysis
TN911.23
A
10.3969/j.issn.1000-5641.2016.02.010
1000-5641(2016)02-0073-08
2015-04
湖南省科技厅科学计划项目(2014FJ6017),湖南省教育厅科学研究项目(13C260),中国博士后基金(2014M561820)
郭凤鸣,男(土家族),工程硕士,副教授,研究方向为无线传感器网络、射频测试. E-mail:egfm2004@163.com.
何怡刚,男,教授、博士生导师,研究方向为电工科学和信息科学等多学科交叉国际学术前沿领域、电工理论与新技术等.E-mail:yghe@hnu.cn.
