含云卫星影像配准算法研究
2016-11-11陈翠婵黄国森
陈翠婵,黄国森,王 越,钟 静
(1. 广东省国土资源技术中心,广东 广州 510000; 2. 武汉市测绘研究院,湖北 武汉 430022)
含云卫星影像配准算法研究
陈翠婵1,黄国森1,王越2,钟静1
(1. 广东省国土资源技术中心,广东 广州 510000; 2. 武汉市测绘研究院,湖北 武汉 430022)
影像上云层的存在不仅覆盖了大量地面有效信息,也给正射影像生产流程中的空三平差等环节造成不利影响。因此,含云卫星影像通常不具备较高的定位精度,在生产应用中被大量闲置。而这些影像的晴空区域仍含有较多的信息,带来了资源的浪费。本文针对国产高分辨率卫星影像,提出了一种顾及云层影像的影像自动配准算法。首先采用Otsu分割与形态学运算相结合的云检测方法以实现卫星影像的云区自动提取;然后在云检测结果的辅助下,将云层中匹配点剔除,优先保证晴空区域的定位精度。本文研究有助于充分挖掘含云影像中的有用信息,提升国产高分辨率卫星影像的应用价值。
影像配准;云检测;粗差剔除
以资源三号(2012年1月发射)、高分一号(2013年4月发射)为代表的国产高分辨率陆地资源卫星影像广泛应用于资源调查、防灾减灾等领域[1]。与此同时,云层的存在不仅覆盖了地物信息,也给影像产品生产流程中的空三、平差等环节造成不利影响,从而影响正射影像产品的定位精度[2]。一般的,这些定位精度较差的正射影像不能参与后续高级产品生产,被大量闲置。而这些影像的晴空区域仍含有较多的信息,造成了资源的浪费。
本文针对国产高分辨率卫星影像,提出一种顾及云层影像的影像自动配准算法。首先采用Otsu分割与形态学运算相结合的云检测方法以实现卫星影像的云区自动提取;然后在云检测结果的辅助下,将云层中匹配点剔除,从而优先保证晴空区域的定位精度,提升影像应用价值。
一、研究背景
1. 影像匹配与粗差点去除
影像匹配是数字摄影测量的核心[3],是影像配准、拼接、目标检测等工作的核心环节。一种传统的匹配策略为:首先通过提取Harris特征点,根据SIFT粗匹配结果或地理坐标信息预测对应同名点的位置,然后对影像进行基于相关系数法的精匹配,从而得到大量分布均匀的同名点[4]。
任何匹配算法都会造成一定数目的误匹配点,因此对匹配点进行粗差点去除是必不可少的[5]。传统的处理手段一般是通过测量平差技术,在区域网平差解算过程中剔除影像匹配粗差[6]。它基于测量误差服从数学期望为零的正态分布的原则,通过计算仿射变换之后匹配点之间的中误差和每个点的残差,将残差大于3倍中误差的点作为误匹配剔除。采用迭代方式进行计算,直至所有匹配点的残差满足条件。
2. 含云影像与云层中匹配点
由于陆地资源卫星成像时间、成像角度的差异,同一区域不同轨道影像,云层的位置并不一致。另外,考虑到卫星前视与后视相机之间、全色与多光谱相机之间均有着一定的成像夹角,即使同轨道同时刻成像,云层在影像上也有着几个像素的差异,如图1所示。
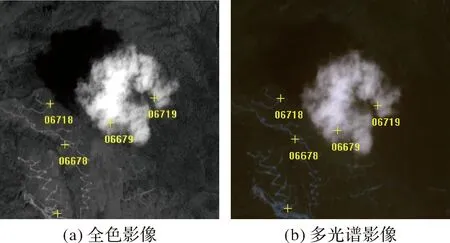
图1 云层位置差异与云层中匹配点
上述情况下在云层的边缘和卷积云内部纹理较丰富处,会存在大量匹配点,如图1中点06719和06679。若这些匹配点不加以去除,就会导致云层实现了配准而实际地物发生了扭曲。当云层面积大、云内匹配点多时,从测量平差的角度很难实现云层中点的去除。实际生产中,一般必须通过交互编辑的方式手动剔除这些云层中的匹配点,这需要投入大量的人力。因此,需要引入有效的算法,从云检测的角度对云层中的点进行去除。
3. 卫星影像云检测
卫星影像自动云检测一直是遥感领域中的研究热点。当前较为常用的云检测算法主要有纹理分析法[7]、多光谱综合法等[8-9]。考虑以资源三号、高分一号为代表的国产高分辨率卫星影像波段少(多光谱影像4个波段,全色影像1个波段)、光谱范围窄(0.45~0.90 μm),多光谱综合法的优势不能得到体现。另外,纹理分析对纹理细节丰富的卷积云不敏感,而这类卷积云内部往往会形成大量的粗差点,因此纹理分析也不适用于云层中点的去除。因此需要探索一种适合国产陆地资源卫星影像的自动云检测算法。
二、算法与流程
1. Otsu分割-形态学处理法云检测
兼顾算法的自动化程度和运算效率,本文采用一种快速有效的阈值分割算法——Otsu算法。Otsu算法也称最大类间方差算法,它将图像按灰度级聚类分成背景和目标两部分,以目标和背景的方差最大为原则来动态确定图像的最优分割阈值,使得类间的灰度值差异最大,类内的灰度值差异最小[10]。Otsu法分割效果较好、简单有效,在已知影像含云的情况下,可用于云区的快速检测和提取。
但是,如果仅使用灰度分割的方式,则会不可避免地对一些高亮建筑物、裸地产生误判。可利用建筑物、裸地尺寸远小于云层的特点,使用指定大小的结构元素,对云区进行“腐蚀-膨胀”形态学处理。其中腐蚀操作可吞噬图像中较小的区域,从而消除阈值分割算法对高亮噪声的误判。腐蚀操作所采用结构元素的尺寸可由影像分辨率决定。膨胀操作可抵消腐蚀操作牺牲掉的真实云区,同时平滑云区的边缘轮廓。考虑到云层缝隙和云层边缘的影像并不方便使用,膨胀操作还负担着填充云缝的作用,因此膨胀操作所采用结构元素的尺寸应大于腐蚀操作时的尺寸。
本文试验中,对于空间分辨率为2 m的资源三号全色影像,将阈值分割结果先进行结构元素为51×51像素的腐蚀操作,再进行结构元素为201×201像素的膨胀操作;对于空间分辨率为5.8 m的资源三号全色影像,将阈值分割结果先进行结构元素为17×17像素的腐蚀操作,再进行结构元素为69×69像素的膨胀操作。可消除大小在100 m以内的噪声,并填充大小在400 m以内的云层缝隙。
2. 同名点匹配
同名点匹配采用当前成熟的技术,首先采用Wallis滤波器[11]对影像进行增强,以提高影像的信噪比,从而保证影像特征在灰度空间的高相关性。然后,采用Harris算子[12]提取子像素级特征点,通过设置合理的间距将影像划分为格网,可以提取得到均匀分布的特征点。最后进行基于灰度的相关系数法匹配,可得到像素级精度[13]的匹配结果。
3. 云中点去除
基于云检测得到的云区范围图,设计云层中匹配点的剔除步骤如下:
1) 读入匹配点文件,获取匹配点Pi在影像上对应的位置,记为Pi(xi,yi)。
2) 以(xi,yi)为中心,设置100×100像素大小的二维窗口,统计窗口内被判断为云的像素点占窗口内所有像素的比例为R,若R>10%,则删除该点。
3) 重复步骤1)—2),直至完成所有匹配点的检查。
粗差剔除后,根据剩余匹配点集构建的不规则三角网,将影像分割成多个三角形,然后利用仿射变换模型拟合同名三角形之间的局部影像畸变,由三对同名顶点坐标求得变换系数后,再以单个三角形为单位进行面元纠正,从而实现影像的精确配准[14]。
三、效果评价
1. 试验数据
资源三号卫星是我国第一颗民用三线阵立体测土卫星。它配置2台分辨率优于3.5 m、幅宽优于50 km的前后视全色相机,1台分辨率优于2.1 m、幅宽优于50 km的正视全色相机和1台分辨率优于5.8 m的多光谱相机[1]。本文选取广东沿海地区6景资源三号全色和多光谱正射影像为试验数据,其中影像1—3含云,影像4—6不含云。分别从定性、定量两个方面分析本文算法的可行性和优势。
2. 目视评价
以测试影像1为例,目视评价包括3个方面:云检测效果、匹配点分布、融合影像细节。分别如图2、图3、图4所示。

图2 Otsu分割 - 形态学处理法云检测示意图

图3 粗差点去除效果

图4 融合影像效果对比(局部)
由图3可以看出,经过Otsu分割、形态学处理后,检测得到的云区较为准确,云区联通、完整,这样更有利于后续的判断,且可以更好地去除云层边缘的匹配点。
由图4可以看出,本文提出的粗差去除策略成功地去除了位于云层中的大部分点,保留了地物上的匹配点。
由图5可以看出,配准前全色和多光谱影像有着明显的地理错位,融合影像上出现重影现象。传统配准算法改善了这一情况,但是云层的存在使地物区域仍然有一定的重影。而本文改进后的配准算法得到的融合影像,在晴空区域的配准效果明显提升,更具有利用价值。
3. 定量评价
从云检测精度和配准精度两个方面对本文策略作定量评价。
首先,从每组相对的全色影像上随意抽取100个匹配点作为样本点。通过人工判读的方式,将样本点分为两类:云层点和晴空点。以人工判读结果作为真值计算自动识别结果的正确率,将其作为云检测精度评价指标。
然后,将随机选取的100个样本点作为检查点,通过人工判读的方式标记对应多光谱影像上的同名点位置,测量标记点与检查点之间的像素偏差,将其作为衡量配准效果的指标。
由表1可知,本文策略对云层点和晴空点的自动识别准确度在95%以上。说明本文提出的云检测算法是可靠的。
同时可以看出,对于不含云影像,传统算法配准误差为1像素左右,但对于含云影像,误差明显变大,为10像素左右。说明云层的存在极大地影响了传统算法的配准精度。去除云层中点之后,配准精度又回到1个像素的水准。另外,对于无云影像,本文算法并没有对配准精度造成明显影响,说明本算法可有效改善含云影像的配准效果,同时也能适应无云影像,满足自动化处理的需要。
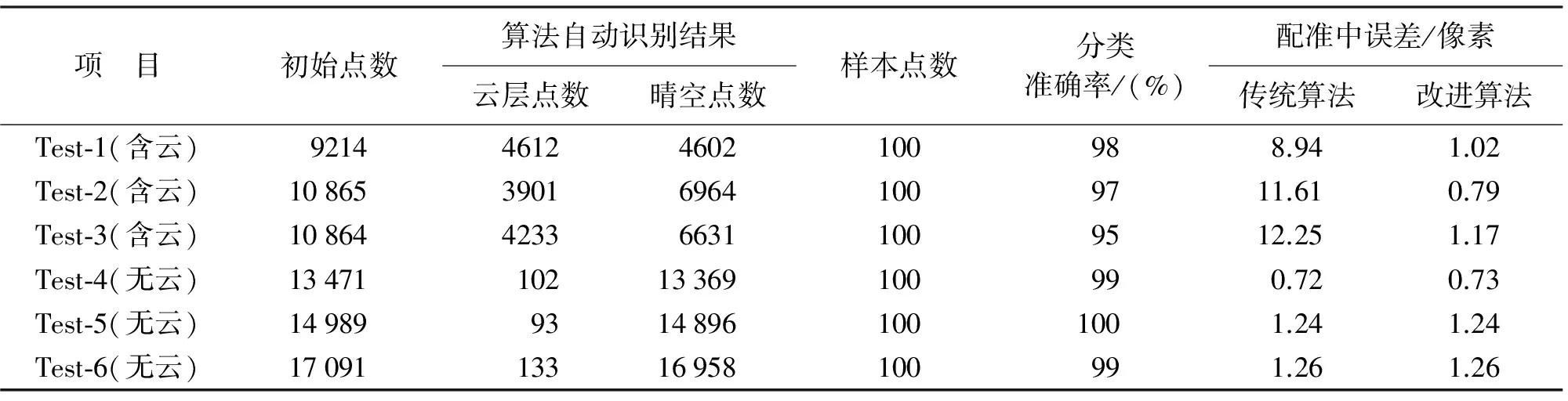
表1 匹配点识别情况及正确率
四、结束语
本文提出了一种顾及云层影响的影像配准策略,并以资源三号卫星影像为试验数据,定性、定量地验证了本算法的可行性和优势。
试验证实,本算法显著提升了晴空区域的配准效果,有助于提升含云影像的利用价值。同时整个流程无需先验知识和人工参与,实现了自动化处理,可满足业务化运行的需要。当条件允许时,也可借助其他辅助信息(影像热红外波段,影像成像信息等)获取更精确的云检测结果,进一步削弱误判情况。
[1]李德仁. 我国第一颗民用三线阵立体测图卫星——资源三号测绘卫星[J]. 测绘学报, 2012,41(3): 317-322.
[2]ZHANG Y J, WAN Y, WANG B,et al.Automatic Processing of Chinese GF-1 Wide Field of View Images[C]∥36th International Symposium on Remote Sensing of Environment.Berlin:[s.n.],2015.
[3]张祖勋. 从数字摄影测量工作站 (DPW) 到数字摄影测量网格 (DPGrid)[J]. 武汉大学学报(信息科学版), 2007, 32(7): 565-571.
[4]崔有祯, 吴露露, 辛星,等. 基于改进Harris算法的高分辨率遥感影像建筑物角点检测研究[J]. 测绘通报, 2013(9):24-26.
[5]张彦峰,艾海滨,杜全叶,等. 基于金字塔影像分割的水域提取在海岛礁空中三角测量中的应用[J].测绘通报,2014(12): 70-73.
[6]张永军, 王博, 黄旭,等. 影像匹配粗差的局部矢量面元剔除方法[J]. 测绘学报, 2014,43(7):717-723.
[7]ZHU Z, WOODCOCK C E. Object-based Cloud and Cloud Shadow Detection in Landsat Imagery[J]. Remote Sensing of Environment, 2012(118): 83-94.
[8]IRISH R R, BARKER J L, GOWARD S N, et al. Characterization of the Landsat-7 ETM+Automated Cloud-cover Assessment (ACCA)Algorithm[J]. Photogrammetric Engineering & Remote Sensing, 2006, 72(10): 1179-1188.
[9]文雄飞,董新奕,刘良明.“云指数法”云检测研究[J].武汉大学学报(信息科学版),2009,34(7):838-841.
[10]OHTSU N. A Threshold Selection Method from Gray-Level Histograms[J]. Systems Man & Cybernetics IEEE Transactions on, 1979, 9(1):62-66.
[11]张力, 张祖勋, 张剑清. Wallis 滤波在影像匹配中的应用[J]. 武汉测绘科技大学学报, 2004, 24(1):24-27.
[12]谢东海, 詹总谦, 江万寿. 改进Harris算子用于点特征的精确定位[J]. 测绘信息与工程, 2003, 28(2):22-23.
[13]张祖勋, 张剑清. 相关系数匹配的理论精度[J]. 测绘学报, 1987,16(2):35-42.
[14]陈奇, 王博, 孙明伟,等. 一种用于制作CBERS-02C卫星融合影像的配准方法[J]. 华中师范大学学报(自然科学版),2013, 47(6):857-862.
On Automatic Registration of Satellite Imagery with the Clouds
CHEN Cuichan,HUANG Guosen,WANG Yue,ZHONG Jing
陈翠婵,黄国森,王越,等.含云卫星影像配准算法研究[J].测绘通报,2016(10):81-84.DOI:10.13474/j.cnki.11-2246.2016.0335.
2016-01-04;
2016-05-28
陈翠婵(1974—),女,工程师,主要从事地图制图工作。E-mail: kenhuzhenxuan@126.com
王越
P237
B
0494-0911(2016)10-0081-04
