矿区多角度无人机遥感三维影像图制作
2016-11-11田雷
田 雷
(吉林铁道职业技术学院,吉林 吉林 130000)
矿区多角度无人机遥感三维影像图制作
田雷
(吉林铁道职业技术学院,吉林 吉林 130000)
利用无人机遥感系统对矿区进行了竖直摄影和倾斜摄影,采用SIFT特征与最小二乘的影像自动匹配方法对影像进行处理,并在此基础上制作完成了测区的正射影像图和三维全景影像图,精度达到了用户要求,从而验证了无人机作为准实时获取矿区空间信息平台的可行性和实用性,为无人机遥感系统在相关领域的应用提供了经验和借鉴。
无人机遥感系统;SIFT特征;最小二乘;倾斜影像;正射影像
煤炭资源的大规模开采引发了一系列地质灾害和生态环境问题,及时掌握矿山地质、生态环境时空演变情况对保护人民生命和财产安全、促进矿产资源的合理开发利用具有重要的实际意义,而定期遥感监测和对突发事件快速反应能力是掌握地理矿情时空演变的主要手段。现有的航空摄影和中高分辨率卫星遥感获取的数据质量高,影像覆盖范围广,但易受天气影响,快速反应能力弱,难以保证突发事件信息获取的时效性。无人机遥感系统机动灵活、使用成本低,可快速准确地获取现势性强、空间分辨率高的多角度矿区影像数据,并结合其他类型数据进行信息综合处理、挖掘与分析,可为矿区环境监测、数字三维矿山、经济活动评估等提供数据支持。
本文从制作矿区多角度鸟瞰景观影像需求出发,研究多角度近地遥感影像自动匹配与空三处理的理论与方法,建立一套快速处理无人机倾斜影像的自动化处理流程,以及DOM与多角度三维倾斜影像图制作的技术流程,为煤矿企业、矿区的科学规划和科学管理提供依据。
一、研究内容
矿区多角度无人机遥感三维影像图制作过程中主要内容包括:相机检校与无人机航空摄影、像控点测量、航空影像自动匹配、快速空中三角测量构网和平差计算及DOM影像图与全景图制作等步骤。
针对无人机遥感平台获取的相邻影像之间存在较大的旋偏角和上下错动,无法使用现有的影像匹配算法获取同名点这一难题,本文研究适用于不同重叠度、倾斜影像同名特征的自动匹配处理方法和算法,实现多角度全景影像自动处理。
1. 研究区概况
本文选择山西潞安煤业集团总部所在地侯堡镇作为研究区。该区地处襄垣县西南端,测区面积约8 km2,境内属丘陵山区,平均海拔890 m,最大高差约100 m,适合无人飞机低空航摄。
2. 技术流程
本文针对非量测相机的检校理论和方法、无人机遥感影像的预处理技术、数字摄影测量空中三角测量加密关键技术、正射影像图(DOM)及多角度全景图制作过程中涉及的重点难点进行了深入研究,具体技术流程如图1所示。
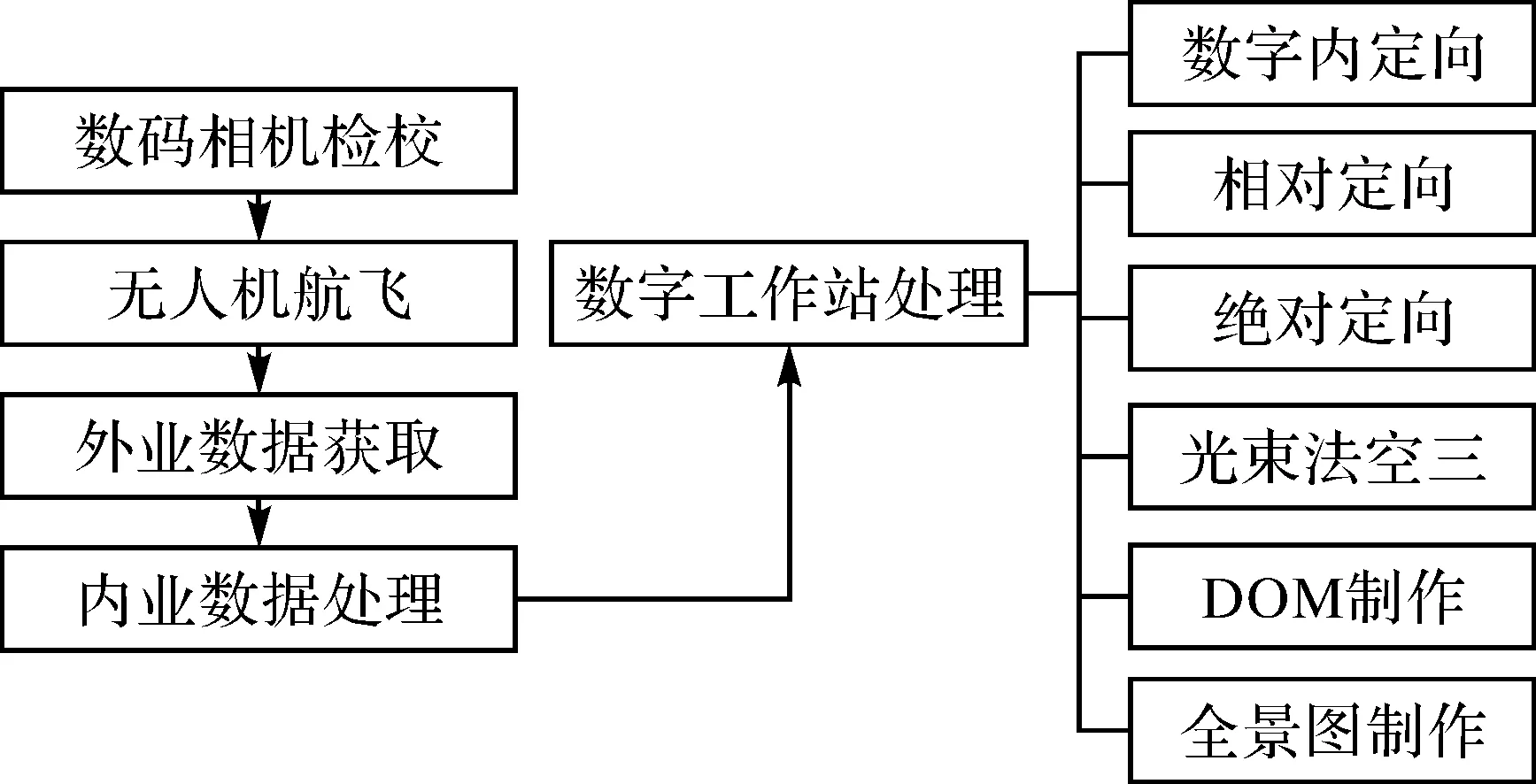
图1 项目实施的技术流程
(1) 相机检校
无人机遥感系统多采用内方位元素和畸变系数未知且不够稳定的非量测相机,因此在无人机航飞前必须进行严格的相机检校,以确保空中三角测量加密精度及制图精度符合要求。本项目使用的是Canon 5D MarkⅡ型非量测相机,在高精度室内检校场完成了镜头畸变校正,原始影像为5616×3744像素,经定标改正后为5716×3810像素,边缘变形最大值为100像素。
(2) 航线设计与航摄参数
针对测区实际地形条件与地理环境及制作DOM和三维影像图的要求,设计了两架次不同飞行姿态的航空摄影技术方案。
1) 竖直摄影航线设计方案。无人机沿南北方向飞行,布设11条航线,每条航线拍摄竖直摄影像片26张,共计286张。
2) 倾斜摄影航线设计方案。为制作测区三维全景影像图,沿东西方向布设了22条航线,每条航线拍摄像片26张,共计572张。
3) 摄影比例尺。设计的成图比例尺与摄影比例尺的关系为:4~6倍。
4) 摄影参数设定。设计相对航高547 m,航向与旁向重叠度分别为70%和40%,地面分辨率为0.1 m。
(3) 像控点布设
航片像控点布设遵循区域网布设原则及成图精度要求(平面和平高控制点相对于邻近控制点的平面位置中误差不超过图上0.1 mm,高程和平高控制点相对于邻近高程控制点的高程中误差不超过0.1 m),实际布设的控制点分布如图2所示。结合测区实际情况及相邻像片冗余信息大(重叠度大),以3~5条航线、10~15条基线构成一个区域网。

图2 像控点分布
二、无人机航摄影像处理与影像图制作
无人机遥感影像的内业处理过程主要包括:影像自动匹配、空三加密、DEM与DOM制作、三维全景影像图制作。
1. 影像自动匹配方法
本文采用基于SIFT特征与最小二乘方法实现影像的自动匹配。基于SIFT特征算法是目前应用最为广泛的图像配准方法,具体步骤叙述如下。
(1) 尺度空间建立
尺度空间的建立是基于图像理论模拟的多尺度空间特征,而高斯函数可以表示其唯一的尺度线性核,因此一幅图像与尺度的高斯函数的卷积即为尺度空间,其数学表达式为
L(x,y,σ)=G(x,y,σ)*I(x,y)
(1)
式中,G(x,y,σ)代表x和y上的卷积
(2)
利用相邻图像的高斯尺度函数卷积相减即可得到D(x,y,σ),即
D(x,y,σ)=(G(x,y,kσ)-G(x,y,σ))*I(x,y)=
L(x,y,kσ)-L(x,y,σ)
(3)
式中,k为相邻尺度间相隔的线型比例因子。
为实现多尺度特征点检测,必须构建线性尺度空间。设定k、σ(初始尺度)初始值,k持续地以增长尺度为kσ的高斯核与之相卷积形成高斯金字塔,其中相邻层的尺度相差因子为k;然后计算DOG算子,通过将高斯金字塔中每个倍频里的相邻图像作差,就形成了DOG金字塔。
(2) 特征点定位
DOG尺度空间的极值点即为特征点。每个像素点(10维尺度空间中)与金字塔上下相邻尺度的两幅图中对应位置邻域内的18个点(2×9个点)及相邻的8个点的像素值进行对比,若该点大于或小于这26个点的像素值,则标记为候选特征点。
高斯差分算子的主曲率由Hessian矩阵计算求出
(4)
DOG尺度空间的主曲率与Hessian矩阵的特征值成正比,即
(5)
式中,α、β分别为最大特征值、最小特征值。令α=γβ,则
(6)
(γ+1)2/γ的值在两个特征值相等时最小,随着γ的增大而增大。
(3) 计算特征点的主角度
为了使算子保持旋转不变特性,可将每个关键点邻域像素值的梯度方向作为指定的方向参数,则梯度的模值、方向参数为m(x,y)=
θ(x,y)=αtan 2(((L(x,y+1)-L(x,y-1))/
(L(x+1,y)-L(x-1,y)))
(7)
式中,L表示每个关键点的尺度。
(4) 特征点描述子
为增强图像匹配的稳健性,实际计算过程中使用4×4种子点对每个关键点进行描述,可形成128维的SIFT特征向量(剔除了尺度变化、旋转等影响);然后再对SIFT长度进行归一化处理,则可消除光照变化影响。
2. DOM与三维全景图制作
(1) DEM提取
以全自动匹配的特征点及定向点(经空三计算并剔除粗差后的离散点)为基础,利用基于内插规则格网和TIN构建数字高程模型(DEM)。
(2) DOM与三维全景图的制作
将每幅影像划分为M×N块,并结合构建的DEM逐块进行数字微分(正射)纠正,然后通过数字镶嵌制作全区域的正射影像图(DOM),如图3所示。
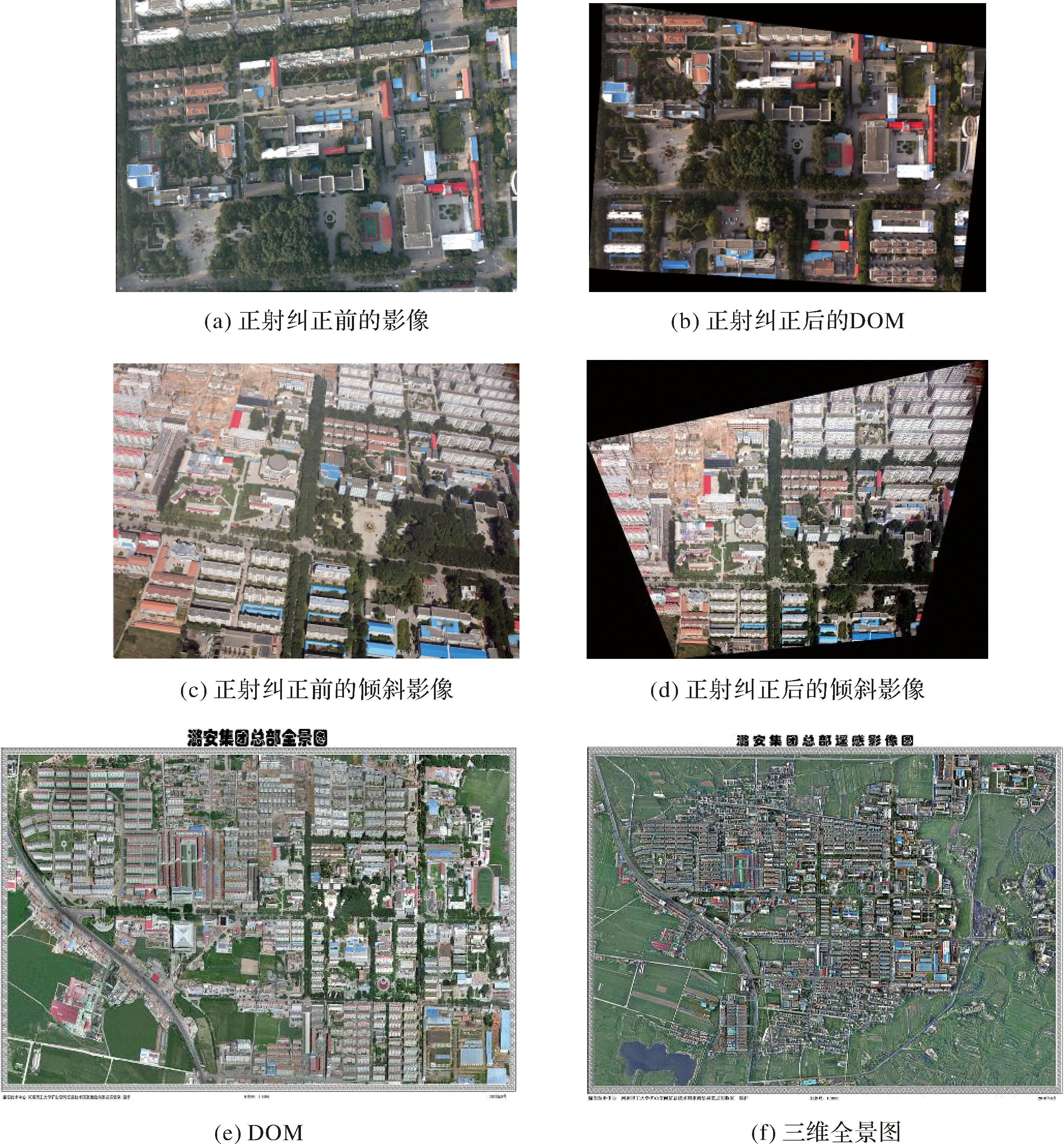
图3 正射纠正前后影像及最终成果
三、结束语
本文针对无人机遥感系统多角度获取的矿区遥感影像,研究了一套无人机倾斜影像快速处理技术,制作了矿区正射影像图和三维全景影像图,且成图精度达到了用户要求,验证了无人机作为准实时获取矿区空间信息平台的可行性和实用性,并可为无人机遥感系统应用于新农村建设提供相应经验和借鉴。
[1]李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版),2014,39(5):505-513.[2]买小争,杨波,冯晓敏. 无人机航摄像控点布设方法探讨[J]. 测绘通报,2012(S1):268-271.
[3]胡荣明,张敏,刘潘. 高分辨率无人机低空影像DEM的建立及其精度研究[J]. 测绘科学,2011,36(4):201-202.
[4]赵星涛,胡奎,卢晓攀,等. 无人机低空航摄的矿山地质灾害精细探测方法[J]. 测绘科学,2014,39(6):49-52.
[5]李珵,卢小平,朱宁宁,等.基于激光点云的隧道断面连续提取与形变分析方法[J]. 测绘学报,2015,44(9):1056-1062.
[6]刘广盛,吕军超. 基于无人机的矿区变化监测关键技术研究[J]. 测绘通报,2013(S1):95-98.
[7]傅卫平,秦川,刘佳,等. 基于SIFT算法的图像目标匹配与定位[J]. 仪器仪表学报,2011,32(1):163-169.
[8]李晓明,郑链,胡占义. 基于SIFT特征的遥感影像自动配准[J]. 遥感学报,2006,10(6):885-892.
[9]陈梦婷,闫冬梅,王刚. 基于Harris角点和SIFT描述符的高分辨率遥感影像匹配算法[J]. 中国图象图形学报,2012,17(11):1453-1459.
[10]何敬,李永树,鲁恒,等. 基于SIFT特征点的无人机影像拼接方法研究[J]. 光电工程,2011,38(2):122-126.
Production of Multi-angle UAV 3D RS Photomap for Mineral Area
TIAN Lei
田雷.矿区多角度无人机遥感三维影像图制作[J].测绘通报,2016(10):73-75.DOI:10.13474/j.cnki.11-2246.2016.0333.
2016-04-07;
2016-07-12
田雷(1963—),男,副教授,主要从事无人机影像矫正研究。E-mail:881997@qq.com
P237
B
0494-0911(2016)10-0073-03
