基于轮速信号的车辆线性运动区状态估计算法开发
2016-11-10刘伟刘威张琨张广晟迟逞
刘伟,刘威,张琨,张广晟,迟逞
(1.东软集团股份有限公司,辽宁 沈阳 110000;2.东北大学,辽宁 沈阳 110000;
3.华晨汽车集团,辽宁 沈阳 110000)
基于轮速信号的车辆线性运动区状态估计算法开发
刘伟1,刘威2,张琨3,张广晟1,迟逞1
(1.东软集团股份有限公司,辽宁 沈阳 110000;2.东北大学,辽宁 沈阳 110000;
3.华晨汽车集团,辽宁 沈阳 110000)
∶文章以轮速信号为基础开展车辆运动状态估计算法的研究,通过对四轮车辆结构和运动分析,结合轮速传感器的特性以及在车辆系统中的应用,开展对车辆纵向运动、侧向运动的估计算法研究,在车辆运动的线性区提供一种车辆状态的估计,在传感器配置有限的条件下为车辆交互系统、控制系统的开发提供更加丰富的信息或者一种作为故障诊断的冗余信号。
∶轮速;车辆动力学;状态估计
10.16638/j.cnki.1671-7988.2016.09.021
CLC NO.: U461.6Document Code: AArticle ID: 1671-7988 (2016)09-55-04
前言
汽车作为一种提供出行和运输的工具,多种的面向不同需求的汽车已经普遍应用于生产生活的各个领域。由于数量众多、能源消耗极大、且在交通参与中不断释放能量,因此安全、节能、环保是各类汽车共同面对的基本问题,其中以安全最为重要。但是又由于汽车是一种日常工具,对系统成本极为敏感,传感器结构和成本的限制,通过车载传感器无法充分获得稳定性控制逻辑需要的状态信息。通过有限的传感器尽获得尽可能多的车辆状态信息,对通过基于信息和控制的智能化手段,突破传统机械结构设计面临的瓶颈,有重要的意义。本文选择车辆中普遍使用的轮速传感器,对其信号处理和相关估计算法展开研究,获取车速、方向盘转角、侧向加速度等状态信号一方面在缺乏传感器时提供更加丰富有效的信息,另一方面为现有传感器提供冗余来加强信号的可靠性。
1、车辆运动状态
本文基于轮速的车辆状态估计算法,面向的研究对象是由一组转向车轮(主要是前轴)和一组非转向车轮(主要是后轴)组成的四轮结构汽车。不同于四轮独立转向的轮式机器人,四个车轮的布置形式、转向桥和非转向桥的分配形式,使车辆运动的自由度收到了约束,这就区别于四轮转向结构的机器人,使得车辆的机动性受到限制,车辆运动有很强的规律性[1]。
考虑在车辆运动的线性区,忽略轮胎的纵向、侧向滑移,或可以容忍的小滑移区间,这个区间覆盖了车辆行驶的绝大多数工况。在车辆运动的线性区,通过对四个车轮独立运动的分析,结合车辆结构分析、动力学分析,可以提供车速、方向盘转角、侧向加速度等纵/侧向丰富的运动信息。
2、轮速传感器及信号的应用
ABS是目前普遍使用的车载控制系统,在欧洲、美国和日本,ABS早已成为汽车的标准配置,目前全世界有超过四分之三的车辆装配了ABS系统[2,3]。
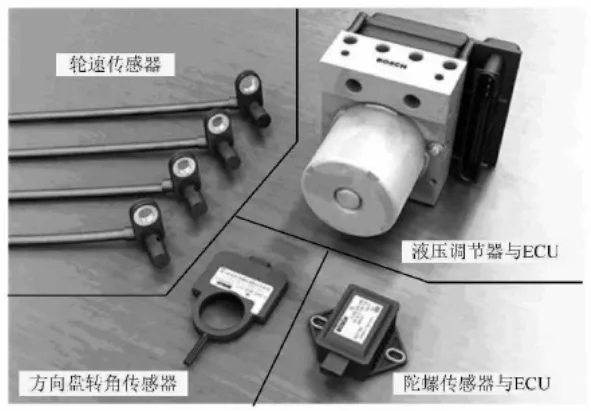
图1 车辆传感器应用现状
随着ABS的不断普及,其已逐渐被电子稳定控制系统(ESC)集成和代替,在提高汽车安全性方面发挥重要的作用。ABS检测由各车轮轮速和车速得到的滑移率,通过液压调节器控制轮缸压力的增压、减压和保压,避免车轮抱死以获得最大限度的路面附着,保证车辆安全。提供轮速信号传感器是ABS、ESC系统的重要组成部分(如图1所示)[4],随着ABS和ESC的普及,轮速传感器在车辆系统中得到了广泛的应用,为轮速信号的应用提供了前提。
轮速信号是稳定性控制中最基本的状态信号,通过对轮速信号的软件滤波和处理获得车速状态。随轮速和车速的变化,轮胎动力学特性会发生显著的变化,车速是滑移产生的基础,对轮胎力学产生重要的影响,从而影响车辆从路面获得的纵侧向力输入。随车速的变化,车辆动力学特性也会发生显著的变化,从空气动力学角度来说,车辆在以下运动时,空气的流场特性是一种紊流状态,对车辆运动几乎不会产生影响,而随着车速的提高,流场趋于稳定的运动特性,会对车辆运动产生显著的有规律性的影响;从车辆动力学角度来说,车速是影响车辆稳定性的重要指标,以质心侧偏角相平面为例,车速的变化会对质心侧偏角相平面稳定边界产生显著的影响,直接关系到车辆操纵稳定性。
3、轮速信号的获取
3.1轮速传感器的原理
轮速传感器采用电磁感应方式,通过轮齿转动带来的间隙变化产生感应电流。在信号产生和采集方面分为被动式和主动式两种类型:被动式轮速传感器提供与车轮转速成正比的正弦频率信号;主动式轮速传感器采用霍尔效应或磁阻技术,提供与车轮转速成正比的数字方波频率信号。信号的采集和处理根据正弦波或方波的频率(结合齿圈轮齿数)来进行转速计算,输出信号幅值与速度有关(如图2所示)。
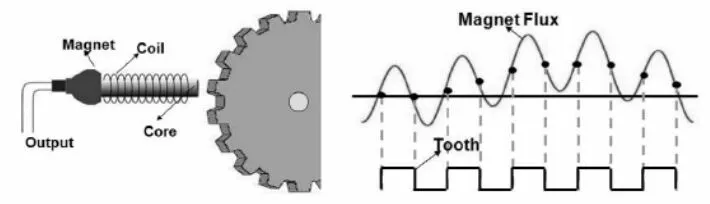
图2 轮速传感器工作原理
3.2轮速信号的获取和预处理
磁电式传感器感应产生峰值和频率均变化的正弦波信号,霍尔式传感器感应产生仅频率变化的方波信号,在信号的变送过程中采用电流环的方式可以实现轮速信号的远距离传播,降低了车辆复杂的电磁环境对信号的干扰,方波的电压范围通过配置精密电阻的方式实现。车辆通过轮速传感器采集各车轮的转动,经过硬件滤波和软件滤波得到原始的轮速信息,设计兼容霍尔和磁电式轮速传感器的轮速信号处理电路,通过精密电阻设计兼容电流环信号、通过比较器设计将正弦波信号整流为方波信号,从而实现轮速信号的采集与硬件滤波(如图3所示)。
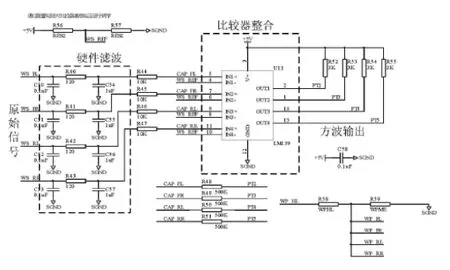
图3 轮速传感器信号采集与滤波电路设计
通过硬件电路进行低通滤波滤掉高频干扰信号,比较器将磁电式传感器产生的正弦波信号或者霍尔式传感器产生的方波信号变换为单片机可采集范围的方波信号,通过单片机端口的输入捕捉功能和内部累加器,采集随轮速变化的方波信号频率,作为轮速传感器进入单片机的第一步。单片机通过端口的输入捕捉功能,使用内部累加寄存器对轮速方波信号频率进行采集,开始对轮速信号在软件架构的组织下进行处理和管理。通过硬件接口部分对端口信号的获得,将处理后的信息进行软件滤波(如巴特沃斯数字滤波器),得到滤波后的轮速信号[5,6],过程如图4所示。
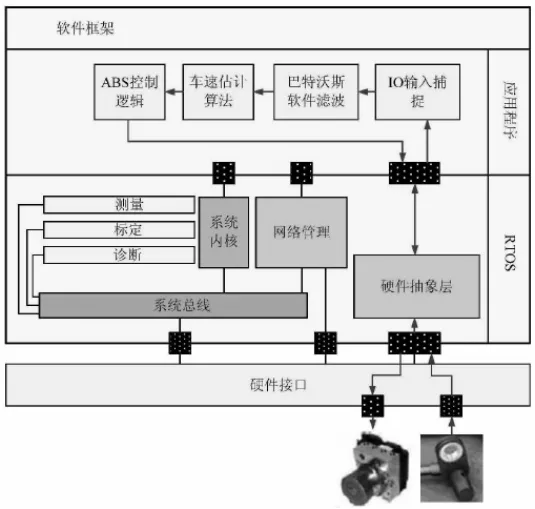
图4 轮速信号处理与应用过程
4、车辆运动状态估计
4.1车速估计
在纵向车速估计中,正常行驶时取各车轮最小轮速作为当前车速估计值Ve。当车辆处于驱动工况时,非驱动轮不存在滑移,因此对于两轮驱动车辆,可采用非驱动轮的轮速平均值作为纵向车速估计值Ve[7],如下式:

其中:Vrl左后轮轮速;Vrr右后轮轮速。
当车辆处于制动工况时,使用最大轮速法和基于车辆纵向加速度的斜率法相结合来计算车速,取两种方法中的最大值作为纵向车速估计值Ve,如下式:

其中:Vfl左前轮轮速;Vfr右前轮轮速。
综上所述对车速估计算法进行实车试验,结果如图5所示。试验结果表明本文的车速估计算法能够对车辆在各种工况下的行驶速度进行合理的估计。
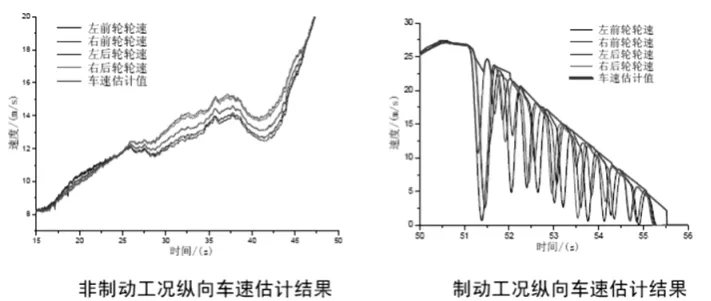
图5 车速估计试验结果
4.2方向盘转角估计
分析轮速信号在车辆转向运动中的变化特性,使用轮速信号对车速和方向盘转角进行估计。在换道试验中,测试制动系统发出轮速信号在一定车速条件下与方向盘转角变化之间的关系(如图6-7所示),换道过程中,方向盘转动最大角度(绝对值)约为90°,轮速差异较为明显(最大轮速差为1.06km/h),可以用于表征车辆的转向过程,但是对于蛇形转向需要注意中间位置的切换(右减左为正是正方向)。

图6 车速25km/h,向左侧变道,再向右侧变回原车道时,制动系统发出的车速与轮速

图7 车速25km/h,向左侧变道,再向右侧变回原车道时,两前轮相对轮速变化
保持车辆直线行驶,以获取轮速传感器自身误差带来的信号波动。直线行驶两侧轮速基本保持一致,最大出现0.3km/h的偏差,这一偏差可以作为限制轮速差对车辆转向运动表征的门限值。根据该偏差,结合四轮车辆结构在转向过程中的分析(如图8所示),可以获得基于轮速差的方向盘转角估计算法[8]。
通过CAN总线获取轮速信号,应用非驱动轮的轮速信号,分别计算出车速估计值和方向盘转角估计值,进一步计算出侧向加速度的估计值。
方向盘转角估计算法如下:
进一步给出侧向加速度估计算法,有:

使用上述估计算法得到在换道过程中方向盘转角和侧向加速度,峰值方向盘转角约为60度(试验车转向传动比为25,峰值转角约为2.4度),峰值侧向加速度约为1m/s2,与车辆30km/h速度行驶情况下,驾驶员操纵车辆换道的情况,如图9所示。
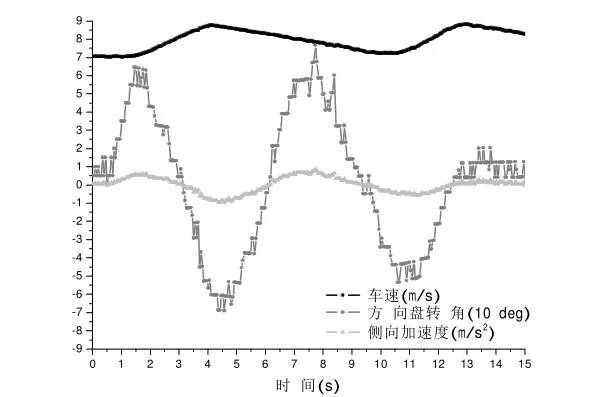
图9 方向盘转角和侧向加速度的估计结果
5、总结
本文结合轮速传感器应用现状和车辆状态信息的需求,通过结构分析和车辆运动分析,从现有传感器中挖掘更加丰富的车辆状态信息,量化的线性区车辆纵向运动和测向运动,从成本控制、可靠性提升等方面提供基于轮速信号的车辆线性运动区状态估计算法。根据试验,本文对车速和方向盘转角的估计能够满足大部分使用工况的需求。
[1] T.J.Gordon&M.Lidberg(2015)Automateddrivingandautonomousfunctionsonroadvehicles,VehicleSystemDynamics,53:7,958-994.
[2] 郝炜,刘伟,张戎,李伟.汽车主动安全系统中的几种关键性技术[J].汽车运用:2009.12:34-35.
[3] 博世公司.从创新到标配博世ABS安全制动30年[J].汽车与配件:2008.44.
[4] LiuWei,LiuWenying,DingHaitao.HydraulicControlUnitModeling of ElectronicStabilityProgramBasedonAMESim[C].ICEIM2011,Appli edMechanicsandMaterials,143:402-407.
[5] 刘国福.ABS轮速信号的滤波技术研究[J].汽车技术:2004.03.
[6] 丛玉良.数字信号处理[M].吉林科学技术出版社:2000.
[7] 李以农,郝奕,郑玲等.基于多传感器信息融合的车速估计方法[J].江苏大学学报自然科学版:2007,28(4).
[8] 余志生.汽车理论5版第[M].北京:机械工业出版社,2009.03.
Development of Vehicle Dynamic State Estimation in Linear Region Based on Wheel Speed Information
Liu Wei1, Liu Wei2, Zhang Kun3, Zhang Guangsheng1, Chi Cheng1
(1. Neusoft Corporation, Liaoning Shenyang 110000; 2. Northeastern University, Liaoning Shenyang 110000; 3. Huachen Auto Group, Liaoning Shenyang 110000)
The wheel speed sensor which is widely implemented in vehicle control system is analyzed for vehicle state estimation. According to the four wheel structure and dynamic property of vehicle, combined with the property of wheel speed sensor, the estimation algorithm for vehicle longitudinal and lateral motion state is designed. The algorithm provides a state estimation for HMI and control system, or redundant information for diagnostic, under the condition that senor implement is limited.
Wheel speed; Vehicle System Dynamic; State Estimation
∶U461.6
∶A
∶1671-7988 (2016)09-55-04
刘伟(1985—),男,高级研究员,就职于东软集团股份有限公司,从事汽车动态仿真与研究。
国家重点研发计划项目(JFYS2016ZY02001610)。