基于DSP28335的开关电源控制策略研究
2016-11-09王子豪
王子豪

摘要:本文研究采用具有高运算精度(32位)和强大系统处理能力的TMS320F28335芯片,通过MEP(Micro Edge Positional)技术输出高精度的PWM波,对开关电源进行控制。系统使用脉宽调制(PWM)控制:固定开关频率,通过改变脉冲宽度,来改变占空比。稳压采用DSP28335控制芯片来实现,根据ADC模块采样得到的电压值进行反馈,实时改变输出PWM波形的占空比,使输出电压保持稳定。
关键词:DSP28335 脉宽调制(PWM) 开关电源
中图分类号:TN86 文献标识码:A 文章编号:1007-9416(2016)09-0022-02
1 引言
电源是各种电子设备不可或缺的组成部分,其性能的优劣直接关系到电子设备的技术指标及系统能否安全可靠地工作。目前常用的直流稳压电源分为线形电源和开关电源两大类。其中开关电源SMPS(Switch Mode Power Supply)又被誉为高效节能电源,它代表着稳压电源的发展方向。提高开关频率可有效地减小开关电源的体积,这就为研究开发高效率、高密度、高可靠性、体积小、重量轻的开关电源奠定了基础[1]。
高频开关电源自20世纪70年代突破20kHz以来,随着技术的进步,其产品的频率一路飙升到500kHz~1MHz。为了保证高频开关电源能够正常、稳定的工作,对控制信号和驱动信号的要求都非常严格。本文通过TI公司TMS320F28335芯片来输出高精度的PWM波,来满足现代开关电源控制策略的发展需求。F28335的系统时钟频率高达150MHz理论上输出高精度的波形频率可以达到5MHz以上,通过CCS(Code Composer Studio)软件编程使PWM波形的占空比随采样周期而变化。
2 DSP28335控制流程
2.1 脉宽调制(PWM)式控制
脉宽调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术,广泛的应用在风力发电、电机调速、直流供电等领域;通常开关电源组成部分,如图1所示。
本文针对DC-DC变换模块进行控制,主电路为boost电路如图2所示。系统的稳压控制方式:PWM波做为控制信号,通过驱动电路进行放大后,驱动IGBT的开通和关断。而波形的占空比随着负载侧反馈的电压值变化,从而完成负反馈闭环控制,达到稳压抗扰动的效果。
2.2 F28335的模块使用
PWM模块来输出控制信号的脉冲波,通过驱动电路控制主电路中的IGBT开通和关断。使用ADC(Analog to Digital Converter)转换单元将负载电压的模拟量转换成数字量,送入芯片进行内部计算。为了保证实时的效果,我们设定采样频率达到最高的12.5MHz。在本文中,我们仅需要用到1个PWM波形输出和1路ADC采样。TI公司为了方便用户开发,已经写好了ADC模块和ePWM模块的初始化函数,在主程序中使用语句“InitEPwm1Gpio();”“ InitAdc();”可直接调用,该函数确定了GPIO0和GPIO1为Pwm1工作以及ADC的输入引脚。
ADC模块由ePWM1 SOCA启动,结果寄存器存放ADC转换结果,转换后的数字量表示为:,ADCLO一般设置为0,需要注意的是F28335的ADC采样引脚的输入电压范围是0~3v,负载电压需要经过分压电路,才可以接入引脚否则会损坏芯片。
2.3 PWM波形的周期和频率计算
PWM波形的频率是由时基周期寄存器(TBPRD)和时基计数器的计数模式(TBCTRL)共同决定的。时基计数器有多种模式,本文使用向上计数(递增)模式,在此模式下,时基计数器从0开始向上计数,直到递增到周期寄存器(PRD)的值后,时基寄存器会自动复位到0,重复以上动作;时基计数器的值不断与比较寄存器(CAMPA,CAMPB)的值相比较,当时基计数器的值等于其中之一时,就会使AQ动作模块产生输出口置高、拉低、翻转的动作[2]。
F28335的时钟频率最高是150MHz,即=6.67*s= 6.67ns,因为寄存器TBPRD的最大值为65535,所以系统也会存在输出PWM的最低频率,若需要频率较低的波形,可以预先对系统时钟进行预分频得到频率较低的系统时钟[3]。PWM波形周期,和占空比的计算方式如下:
高精度脉宽调制模块(HRPWM),当PWM的工作频率较高时,CPU控制精度会下降,一般来说PWM频率高于200kHz时,就应该采用HRPWM模块来提高精度。HRPWM是基于微边沿定位(Micro Edge Positional,MEP)技术,MEP逻辑通过对常规的PWM发生器的原始时钟进行细分,从而可以进行更精确的边沿定位。时间步长可达150ps的数量级,HRPWM含有软件自诊断模式,用以检查微边沿定位(MEP)逻辑是否运行在最优模式[4]。
3 CCS软件编译程序
3.1 PID反馈控制函数
PID调节是将输出量直接或间接反馈到输入端形成闭环控制方式。在不同的工作环境下,干扰也是一直存在的,如果干扰存在,系统的实际输出值就会偏离期望输出值,当出现这种偏离的时候,系统自身则会利用负反馈产生的偏差所取得的控制作用再对所产生的偏差进行消除,使系统的输出值恢复到期望值上,所以闭环调节对于系统来说十分有存在的必要,它可以提高系统的抗干扰性能。
3.2 输出变化占空比的PWM波形
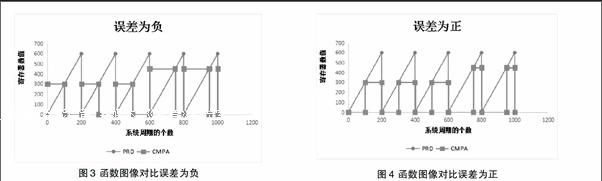
在主程序中,程序会先判断误差的正负,如果误差为负,则调用HRPWM1函数;若误差为正则调用HRPWM2函数。函数图像对比如图3、图4所示。
当误差为负时,随着误差绝对值增大,占空比D增大,负载电压上升;误差为正时,随着绝对值增大,占空比D减小,负载电压下降,控制回路的负反馈达到电路稳压效果,程序如下所示。
在本程序中时基周期寄存器工作在立即装载模式,而比较寄存器工作在影子寄存器模式,这样在占空比V_Duty不断变化时,可以有效地将比较值CMPA送入寄存器中。
4 结语
由于实验条件有限,本次实验没有能够做出Boost主电路板的实物,通过3v模拟电源串联可调电阻得到变化的电压接入ADC输入引脚,来代替系统采集的负载电压。由示波器可以看到GPIO0引脚输出了理想的波形。
随着以IGBT为代表的全控性开关器件制造工艺的升级,耐压性不断地提高,并且成本也在不断地降低,单管变换器的使用将会愈发广泛。随着软开关技术的使用,在不久的将来,也许电力电子领域最可靠的电路亦是最简单的电路。本文通过DSP28335芯片对开关电源的DC-DC模块进行控制,设计了具体方案并列出了详细的软件调试源程序,对读者进行DSP开发或者电源设计具有非常重要的参考意义,最后通过实验对理论进行了验证。
参考文献
[1]张纯亚,何林,章治国.开关电源技术发展综述[J].微电子学,2016(02):255-260.
[2]张卿杰,等.手把手教你学DSP:基于TMS320F28335[M].北京:北京航空航天大学出版社,2015.
[3]郑雪,蒲世豪,陈常.基于DSP开关电源控制系统的设计[J].真空,2016(02):66-72.
[4]陈健斌.智能化数字电源研究[J].数字技术与应用,2016(04):93.
[5]徐定成.基于自学习的模糊PID参数自整定技术及其应用研究[D].重庆大学,2006.
