S模式空管二次雷达询问与监视技术研究
2016-11-09邹殿臣
邹殿臣
摘要:随着我国军民航飞行流量的日益增加,A/C模式的二次雷达在空中交通管制高强度使用中已暴露出诸多不足。S模式是一种先进二次雷达协议,正在逐步取代传统的A/C模式得到普及应用。本文首先分析了S模式二次雷达系统的工作原理,进一步研究了S模式询问和应答信号格式,最后分析了S模式二次雷达应用于空中交通管制系统的优势。
关键词:S模式 二次雷达 信息处理 询问与监视
中图分类号:TN95 文献标识码:A 文章编号:1007-9416(2016)09-0086-02
二次雷达,也叫二次监视雷达(Secondary Surveillance Radar:SSR)[1],可以克服一次雷达(RSR)的混扰和串扰等缺点。二次雷达是针对一次雷达而言,它是在第二次世界大战后从军用的敌我识别系统(IFF)发展起来的,IFF有多种询问模式和应答模式。二次雷达目前广泛使用了单脉冲目标检测技术,大大提高了对飞机方位测量的精度和应答解码的准确度。
在以往空中交通管制中通常使用A/C模式二次雷达,其工作过程采用A模式和C模式进行轮流询问,A模式用来识别空中飞机代号,C模式用来识别飞机高度。由于空中交通流量日益增加,航路拥挤,传统A/C模式二次雷达逐渐暴露问题:飞机编码数量有限,代码数仅为4096个;可交换信息少,只能应答飞机的代号、气压高度,远不能满足高性能空管系统自动化的要求;飞机的机动飞行将会遮蔽机载天线以及地面反射将会产生盲区;目标方位、距离等参数的分辨率低等。针对上述问题,为满足空中交通日益增长的需要,美、英等国从20世纪70年代以来,研制发展了离散选址信标系统DABS(Discrete Address Becon System)和选择寻址二次监视雷达系统(ADSL)。两项成果合二为一,由FAA(Federal Aviation Administrator)命名为S模式二次监视雷达。
1 S模式空管二次雷达系统工作原理
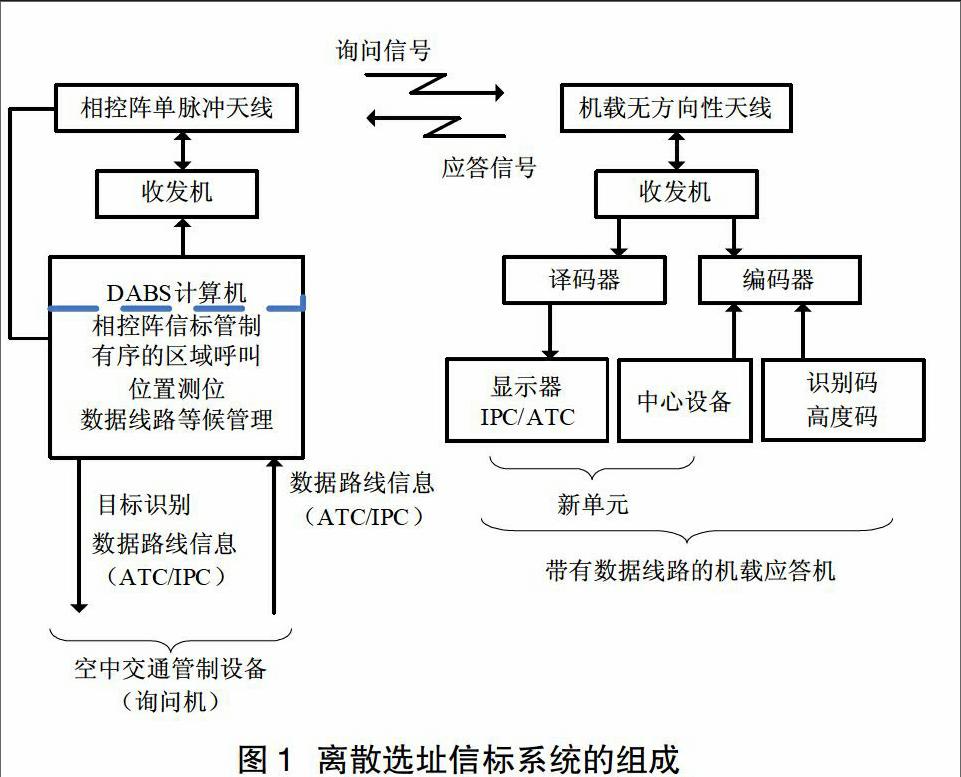
S模式空管二次雷达专为完成探测、识别合作飞机任务而设计。S模式二次雷达系统由地面S模式航管雷达询问机和机载ATC/S模式应答机组成。整个系统采用“问—答”方式。询问信号频率为1030MHz,应答信号频率为1090 MHz,与A/C模式二次雷达系统一样,因此两个系统能够兼容并用。同时为了克服A/C模式二次雷达系统的缺陷,S模式二次雷达采用离散选址信标系统,整个系统组成如图1所示。
离散选址信标系统的基本思想是赋予每架飞机一个指定的地址码,由地面系统计算机控制进行“一对一”的点名问答,即地面询问是一种只针对选定地址编码的飞机专门呼叫的询问。它与A/C模式二次雷达的根本区别是,装有离散选址信标系统S模式应答机的飞机,都有自己单独的地址码,即编有地址的飞机对地面询问也用本机所编的地址码来应答,因而每次询问都能指向所选定的飞机。但为了不使现存系统完全淘汰,机载S模式应答机设计成与现在的A/C模式系统兼容并用,简称这种兼容两种模式的应答机为ATC/S模式应答机,即ATC应答机也能应答A/S模式和C/S模式全呼叫的询问,而S模式应答机也能作A模式和C模式的应答[2]。
S模式询问机由双通道结构组成,参见图1。S模式询问机的一个重要功能是对目标飞机预先按规定进行地址编码,用作选择性询问。S模式的地面站利用地址编码能与每架飞机单独联系,询问机只向它负责监视的飞机进行S模式询问,它利用跟踪装置保存每架飞机的预测位置,等天线波束指向所需飞机时发出询问。选择性询问对各次询问进行了适当定时的点名,因而多架飞机不论其距离或方位如何靠近,其应答都不会互相重叠或窜扰,从而可以解决空管雷达系统中的同步窜扰和应答机过载等问题。因此,S模式二次雷达系统等到的飞机位置数据将比现用雷达系统准确和可靠,为管制人员提供了比较平滑而且前后一致的目标航迹。
2 S模式空管二次雷达询问和应答信号格式
2.1 询问信号格式
S模式地面询问信号的频率是1030MHz,为了适应A/C模式和S模式的兼容并用,地面询问机发送两种类型的询问信号。一种是为兼容而设的S模式脉幅调制(PAM)询问脉冲信号,其频率的精度较低,为1030±0.2MHz;另一种是专为S模式使用的二进制差动相移键控(DPSK)询问信号,这是一种等幅载波,其频率精度要比脉幅调制信号高出20倍,达到1030±0.01MHz,这是为了在调解中不产生相位模糊现象而要求的。这种DPSK询问信号不单只询问飞机代号和高度,还可作上传输报文通信A和报文通信C的数据通信之用。
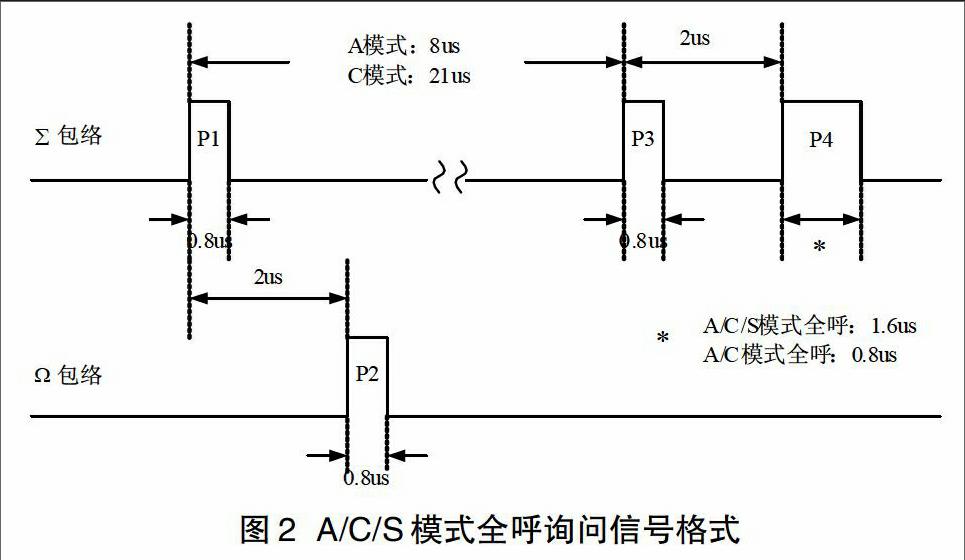
A/C/S模式全呼叫询问信号格式如图2所示,P4宽度为0.8us时表示A/C模式全呼叫,P4宽度为1.6us时表示A/C/S模式全呼叫。A/C/S模式全呼叫询问时A/C和S模式的应答机均对询问信号进行应答,其中S模式的应答信号包含飞机的身份标志和24bit地址信息。Pl和P3宽度为0.8us时,间隔8.0us为A模式询问,应答为12位飞机代码;间隔21.0us为C模式询问,应答为飞机气压计高度。
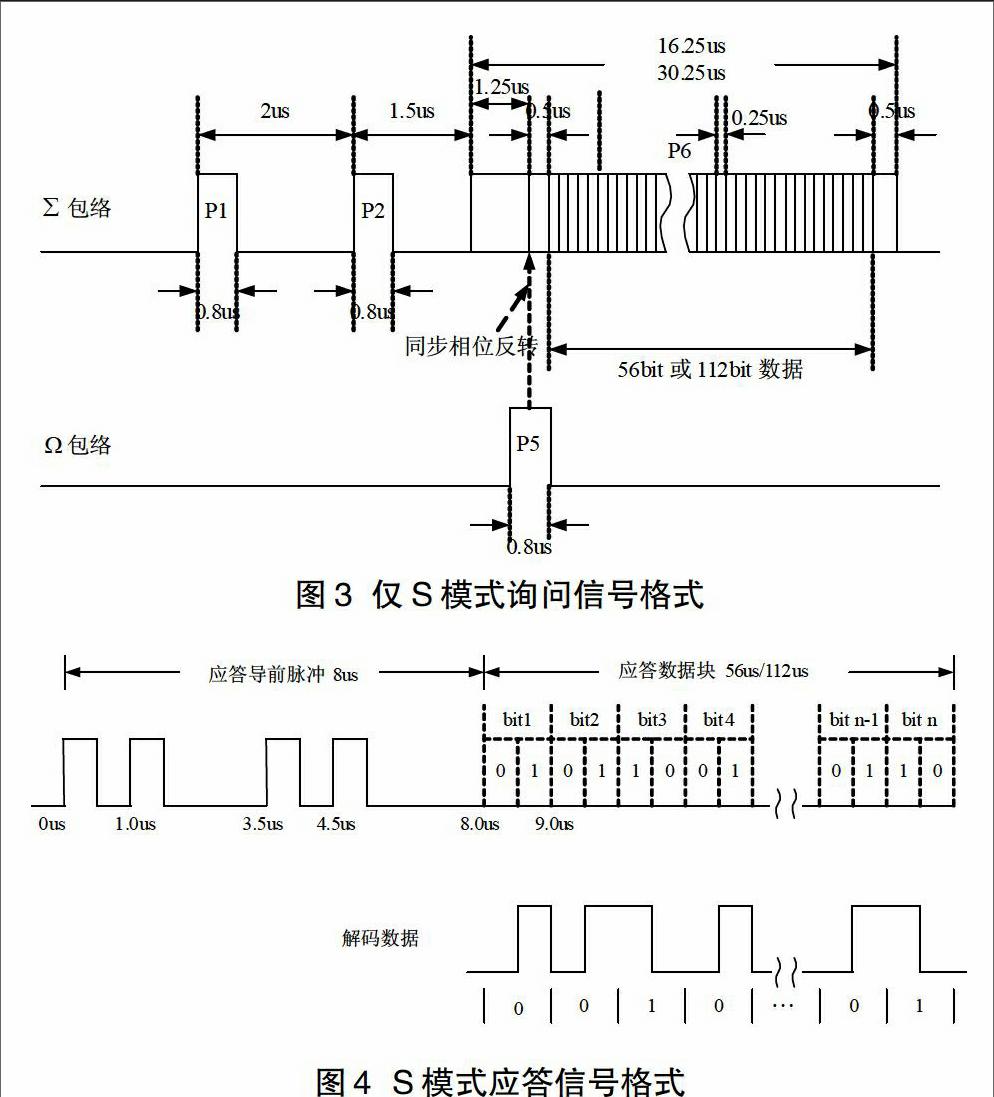
仅S模式全呼叫询问信号格式如图3所示,P1和P2脉冲宽度均为0.8us且脉冲幅值相等,间隔2.0us,这就和普通二次雷达系统的旁瓣抑制情况相同。P2脉冲之后是一个P6长脉冲,持续时间为16.25us或30.25us。P6脉冲之内有一系列的相位反转用来携带被传输的数据,该数据采用差动移相键控(DPSK)的方式发送。S模式二进制差动相移键控询问信号是一种利用正弦波射频载波询问变化来传送数据的方式,是在“A/C模式/S模式全呼叫”询问之后,地面询问接收机收到S模式应答机的S模式“全呼叫回答”,已获得了飞机位置(方位、距离和高度)和该飞机地址码,并以带有该飞机地址码字段作S模式点名式的询问时使用。全部S模式点名询问信号(包括仅S模式“全呼叫”询问信号)均是二进制差动相移键控信号,其发射频率的精度要求较高,为1030±0.01MHz。
2.2 应答信号格式
S模式应答机发射的应答信号,主要有两种:若是相应A/C模式的询问,则以A/C模式的脉冲调制应答信号作回答;若是相应A/C模式/S模式全呼叫、S模式选址询问或S模式全呼叫,则以S模式的脉冲调制应答信号作回答。
S模式应答信号格式如图4所示,应答的脉冲调制信号由前同步脉冲和数据脉冲组成。前同步脉冲由起始的8.0us内两组0.5us宽的脉冲对形成。应答数据是由脉位调制的,其脉冲位置随调制信号的二进制数而变化,所有脉冲幅度和宽度不变,有56位和112位两种。在每位1us间隔的前半周0.5us内发射脉冲时,表示逻辑电平1;而在后半周0.5us内发射脉冲时,表示逻辑电平0。这种编码称为曼切斯特编码,保留了同步信息并具有一定的抗干扰能力,因为干扰不可能使得干扰能抑制某个位置上的脉冲或是在邻近的位置上插入一个脉冲[4]。图3中应答数据脉冲对应位的顺序为01011···001。
对于S模式的询问信号,当S模式应答机采用脉位调制应答时,其下传输应答格式有25种,目前主要使用的有8种:
S模式下传输应答0号格式“专门监视(短报文)”的应答信号,由56位组成。
S模式下传输应答4号格式“报告飞机高度”的应答信号,由56位组成。
S模式下传输应答5号格式“报告飞机代号”的应答信号,由56位组成。
S模式下传输应答11号格式“全呼叫应答”的应答信号,由56位组成。
S模式下传输应答16号格式“专门监视(长报文)”的应答信号,由112位组成。
S模式下传输应答20号格式“报告飞行高度,通信B”的应答信号,由112位组成。
S模式下传输应答21号格式“报告飞机代号,通信B”的应答信号,由112位组成。
S模式下传输应答24号格式“通信D加长报文” 的应答信号,由112位组成。
3 S模式空管二次雷达监视的功能优势
S模式二次监视雷达是一种发展的趋势,具有基本监视、增强监视、数据链等多种功能,它既保留了空中交通管制雷达信标系统(ATCRBS)的功能,又增加了S模式特有的功能。S模式二次雷达具有一下几个优点:
兼容性:S模式二次监视雷达系统同样采用“问—答”方式,但询问是用具有选择性的S模式工作。为了使A/C模式和S模式兼容并用,A/C模式应答机应能应答S模式的询问,而S模式应答机也应能回答A/C模式的询问。为了适应A/C模式和S模式的询问,DABS地面询问机对其所管辖范围内的所有飞机做一个“全呼叫”的询问作应答。
选择性寻址:S模式利用离散寻址而不是广播方法来请求应答,询问信号和应答信号都带有表示飞机代号的24bit二进制地址,一机一码,防止询问信号窜扰其他飞机。
数据链传输:S模式数据链可应用于ADS-B,利用大量飞机装载的S模式机载应答机,通过数据链可以实现地空、空空和地地的信息传输。
校验与纠错:接收方通过解析收到的信息来校验数据和地址是否被正确传输,如果解析数据错误,可采用相关技术进行数据解错、修正,保证了数据传输的可靠性。
防相撞手段:空中交通警戒和防撞系统(TCAS)利用S模式应答器的信号来确定临近飞机的距离和高度,可确切知道对方的坐标位置,有利于选择正确的回避措施。
具有S模式接收、发送功能的询问机和应答机是现代雷达的代表,S模式优越性使其在空中交通管制、飞机防相撞、多点定位、ADS-B等系统和军用敌我识别系统中广泛应用。归纳S模式二次监视雷达的特点,今后二次雷达发展趋势有三个方面,即单脉冲技术、选择性询问和空地双向数据通信。
4 结语
目前我国航空又进入了一个大规模的雷达更新换代的基础建设阶段,S模式二次雷达的优势在于它是建立在一次监视雷达和传统二次雷达的基础之上,航空器有丰富的资源可以被我们充分利用,不需要管制员与飞行员更多的干预,就能够提供更多的服务功能[3]。充分利用S模式二次雷达,科学合理地控制航空流量,将进一步提高我国空中交通管制效率。
参考文献
[1]Manual the secondary surveillance radar system [M].ICAO,2004.
[2]汪晋峰.对单脉冲二次雷达S模式的认识[J].信息与电脑(理论版),2011(6)194:195.
[3]程擎.新航行系统与飞行安全研究[D].西南交通大学,2003.
[4]王洪,刘吕忠,汪学刚.二次雷达S模式综述[J].电讯技术,2008(7):113-118.
[5]张尉.二次雷达原理[M].北京:国防工业出版社,2007.
[6]刘慧英,周勇.空中交通管理系统导论[M].北京:国防工业出版社,2002.
