基于旅游寻宝应用环境下的智能机器人的研究与设计
2016-11-09潘运丹蓝丽金
潘运丹 蓝丽金
摘要:本设计研究一种基于旅游寻宝应用环境下的智能机器人,利用红外模块、电机与舵机、摄像头等模块,主控芯片采用STM32F103ZET6芯片,将在特定软件下编译好的程序下载至主控芯片,主控芯片针对红外反馈的环境信息,给电机、舵机等下发指令已完成相应动作。能够实现在一定时间内,在一定的环境下到达尽可能多的景点,途中需顺利通过各种门槛,路障等。每到一个景点完成进行一定的识别,完成寻宝任务。
关键词:旅游 寻宝 机器人
中图分类号:G624.24 文献标识码:A 文章编号:1007-9416(2016)09-0008-02
机器人自21世纪以来,取得了突飞猛进的发展。工厂里的机械臂大大加快了生产效率,医院里的机器人提高了手术的成功率,家庭服务机器人方便了人们的居家生活。机器人的使用给人们带来了很多的便利,并且机器人能够替代人们完成各项危险的工作,其安全性为科学研究的方式提供了不可磨灭的作用。2013年12月14日21时11分18.695秒,嫦娥三号成功实施软着陆,降落相机传回图像。玉兔号月球车漫步在坎坷的月球面上,会遭遇未知的地形,环境等因素的干扰。本研究设计的机器人能够通过网咖来自动选择未知的路线,途中也将碰到未知的障碍,并且能在有限的时间内来完成旅游寻宝任务。这些都是月球车探测,南极考察等技术基础[1]。
1 机器人总体功能及性能指标
本研究设计的机器人具有以下几个功能:
(1)系统规划与优化能力:在一定的时间内游览多景点,完成计划中的旅游活动,并回到出发地点。需要一种最优规划以达到所要求的目标,需要有一定的系统规划与优化能力。
(2)应变能力:面对有些可移动景点与不可知的路障摆放数量与位置,在机器人进入场地后,所走的路线避免不了那些路障,此时需要机器人对此做出一定的应变以顺利完成任务。
(3)视力及定位:机器人辨别数字、文字、形状和色彩的能力,引导机器人视力及定位能力的提高。
(4)爬坡能力和跨越门槛能力:由于应用环境的需要,使得机器人具有一定的爬坡能力和跨越障碍的能力。
(5)对抗能力:具有一定的对抗能力,已完成任务。
(6)快速性与稳定性:机器人在整个过程中,要在快速性与稳定性中间求得平衡。
2 机器人的结构与外观
该机器人的外形具有稳定性、坚固性以及时速性。系统结构上半部分为人型结构,下半部分为四轮的车型结构。车底安装电机、主控芯片,红外等一系列必需的配件。主控板位于底板中央,电池嵌在底板下方。八个避障红外的安放位置分别为:前左,前右,前下左,前下右,中左,中右,中斜,后右。两条循迹板位于前后底板下,且保持对称。人型双脚跨在主控板两边,向上直立竖起人型支架。支架由若干连接件,长条构成。肩膀处架有摄像头,摄像头另有一根固定在底盘上的杆固定。机器人头部连着一个小舵机。
3 硬件系统
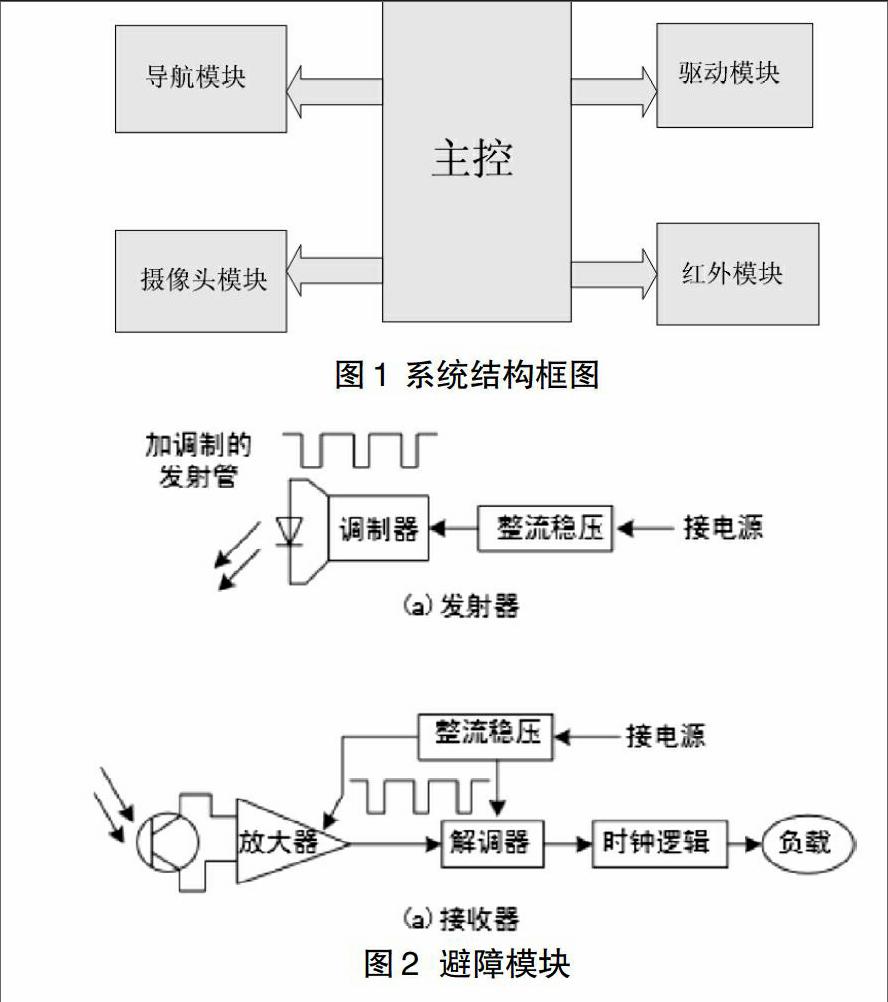
硬件系统主要由主控、红外模块、驱动模块、导航模块、摄像头等构成,结构框图如图1所示。主控板为机器人核心部分,由主控芯片,显示屏,I/O,A/D,红外等相关元器件组成。将在特定软件下编译好的程序下载至主控芯片,主控芯片针对红外反馈的环境信息,给电机、舵机等下发指令以完成相应动作。
3.1 主控制器
本设计主控芯片采用STM32F103ZET6芯片。该芯片是一种基于ARM Cortex-M3核心的32位微控制器。拥有512K片内FLASH(相当于硬盘),64K片内RAM(相当于内存),片内FLASH支持在线编程(IAP)。同时有高达72M的频率、数据、指令分别走不同的流水线,以确保CPU运行速度达到最大化。功能较齐全,便于控制[3]。
3.2 红外模块
红外模块分为避障与循迹两个部分,由于红外探测传感器发出红外光,常见光对它的干扰极小,可应用于智能小车的循线、避障以及其它机器人中物料检测、灰度检测等系统中。避障模块采用E18-D50NK集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出有效的避免了可见光的干扰,如图2所示。检测障碍物的距离可以根据需求通过尾部的电位器旋钮进调节。
循迹模块包括12×2个二极管,1×2个LM339M芯片,4×2个LED,以及若干电阻等电子元件。
3.3 导航模块
导航模块采用JY901,该模块包含有MPU6050、HMC5883、气压计等模块,并通过板载模块进行卡尔曼滤波生成方位数据,经IIC或串口与主控芯片通讯。
3.4 驱动模块
本设计驱动模块由电机与舵机组成。舵机采用4个MG995和2个MG90S。MG995型结构材质为模拟金属铜齿、空心杯电机,双滚珠轴承,反应转速:无负载速度0.17秒/60度(4.8V);0.13秒/60度(6.0V)。电机为直流电机组成(4个)。
3.5 摄像头模块
该机器人的摄像头采用OV7670。其主要参数如下:感光阵列:640*480;电源核电压:1.8VDV±10%;视场角:25°;光学尺寸:1/6”。
4 软件系统
软件系统包括如下几个部分:
(1)绘图软件。Altium designer10、AutoCAD2010提供PCB、板子制作的电路图、尺寸的绘制。
(2)编译平台。Keil uVision4提供机器人相关程序编写平台。其中涉及C语言程序编写的相关知识,参考文献4。
(3)下载模块。JLINK-ARM作为STM32F103ZET6芯片烧写器。
(4)图像识别系统。
通过摄像头OV7670识别景点的数字,并反馈会主控芯片。
图像识别方案:模板法。通过上位机采集OV7670的数据,数据形式为十六进制,将采集出来的数据经过人为处理作为数字模板。在进行摄像头识别的时候,与此时采集的图像做比较来确认数字。优点:识别精度高;缺点:时间较久。
定位辅助:由于OV7670焦距视野的特点,照射范围有限制,照射长度也需要控制在一定范围内为宜,所以加入了红外传感器作为定位辅助,以提高性能。
5 特色点与创新点
5.1 外型结构自主设计制作
设计的机器人采用底座为玻纤板,人型支架为塑料的材质,这有利于后期的打孔,并节约材料、废物利用,重要的是,塑料材料质量轻,压低重心。外形结构具有以下几个特性:
(1)稳定性。机器人在过门槛,路障时,特别是转弯时需要注重其稳定性,兼顾速度。
(2)坚固性。具有一定的坚固性,尽量减少机器人受到撞击时内部电元器所受到的的伤害。
(3)时速性。由于车身高度大,重心较高,偏前,需要保持一个较为稳定的加速度。
5.2 红外避障系统和循迹系统的设计
5.2.1 红外避障系统
循迹红外上电复位后,首先进行系统初始化。避障红外分别设置在前端,中部(以一定角度向右倾斜),后端。复位后,避障程序不断循环运行,当前端朝下的红外检测到障碍时,前舵机会相应的放下,将机器人抬高,以通过门槛。当向后倒退时,有后端红外来感应,行动方式亦然。
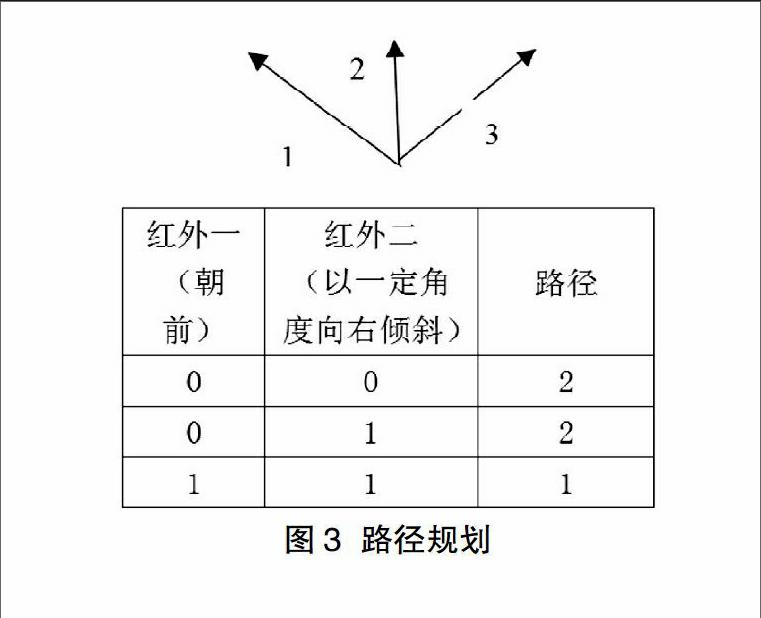
根据应用环境可能遇到的路障,因此需要通过红外感应路障,并选择顺畅的路径完成任务。当避障红外感应到路障时,反馈回主控台,通过程序的设定,选择相应的路径。(以分支口有三条路径为例。)如图3所示。
5.2.2 红外循迹系统
循迹红外上电复位后,首先进行系统初始化。复位后,循迹程序不断循环运行,循迹红外不断感应场地的路线,将场地的路线反馈回主控板,主控板根据相应的情况,按照程序设定,使机器人完成相应动作,改变驱动电机的转速,以使机器人能够按照场地路线运行而不偏出。
机器人中间另设有两个红外,其功能可用来辅助循迹红外,通过记录红外感应的次数,使其在十字路口等多分支路口转向是起到准确转弯,准确选择设计路线等功能。
机器人活动部位是靠舵机驱动来实现的。当遇到门槛时,前底盘舵机驱动杠杆将前机身抬起,后轮驱动前行,使得机器人顺利通过门槛障碍。当机器人向后时,后底盘舵机发挥作用。当到达每一个目标的时候,顶部的两个舵机驱动机器人的手作前后摆动,小电机带动乒乓球自制的机器人脑袋做左右90度旋转。人形的设计使机器人的自由度可以通过不同的程序使其配合轮子进行不同程度的动作展示。
5.3 选择最优路径
本研究设计的机器人适合各地形,通过测试每段路程的时间,综合考虑时间与分数,尽可能用有限的时间得到最高的分数。
5.4 程序的调试与运行
程序的调试运行是机器人能够实际稳定运行必不可少的。需要考虑的因素:
(1)地面的摩擦。由于地面的粗糙程度和机器人重量会使机器人在转弯发生一定的偏差。
(2)重心。机器人由于人形部分导致机器人的中心改变,在上坡、转弯、过门槛的时候会产生一定的影响。
(3)速度。机器人需要追求速度,但要考虑到高速后转弯的准确度会受影响,速度产生的惯性也会时机器人在运行时不稳定。
(4)其他因素。在调试的时候会发生一些意想不到的因素导致机器人运行不稳定。
根据影响条件,结合实际运行状况调节相关参数。其中制定一些备案方案。比如:过弯可结合中间红外的计数或者利用机器人的惯性或通过循迹红外时时纠正等。
6 结语
本设计研究的基于旅游寻宝应用环境下的智能机器人,能够较好地对该环境下的景点进行识别,具有较好的应变能力和对抗能力,给探测等应用背景提供有利的技术基础。
参考文献
[1]金周英.关于我国智能机器人发展的几点思考[J].机器人技术与应用,2001,(4):5-7.
[2]张伟.环境智能化与机器人技术的发展[J].机器人技术与应用,2008,3:13-16.
[3]杜春雷.ARM体系结构与编程[M].北京:清华大学出版社,2003.
[4]谭浩强.C语言程序设计(第3版)[M].北京:清华大学出版社,2014.
[5]Paolo Cornelli,Paolo Ferragina,Mario Notturno Granieri,Flavio Stabile.Optical recognition of motor vehicle license plates[C].IEEE Transactions on Vehicular Technology,1995,44(4):790-799.
