能量受限的微型无人机移动策略研究
2016-11-09徐马蒙
徐马蒙,刘 航,夏 宁
(西北工业大学 自动化学院,陕西 西安710129)
能量受限的微型无人机移动策略研究
徐马蒙,刘 航,夏 宁
(西北工业大学 自动化学院,陕西 西安710129)
针对无线中继网络场景中微型无人机能量优化的目的,提出一种基于传输速率梯度变化最大的移动策略。通过理论仿真,并且和传统的直线移动策略进行对比,对比结果表明:依据所提出的移动策略,微型无人机转发的数据量提高6%,单位数据量消耗的能量降低8%,从而提升了无人机执行任务的效率。
微型无人机;移动策略;中继网络;能量优化
微型无人机(Micro Air Vehicles,MAV)具有质量轻、尺寸小、机动性强、隐蔽性好等优点,适合在条件受限或具有潜在危险的复杂对抗环境下执行搜索救援、军事侦察等应用任务[1-2]。由多架微型无人机组成的无人机机群可以携带不同传感器、以协同方式执行探测、监控、侦察、跟踪任务。此类微型无人机集群可以加速任务的完成,构建和维护成本远低于中小型无人机,并且能够方便地扩展工作范围,抗毁性能强[3-4]。虽然如此,但是由于微型无人机有限的能量和有限的通信距离,无法实现稳定的长距离通信,可能无法将感知到的数据不失真的传输给地面控制站或者其他无人机。建立中继是解决此类问题的关键,以其他无人机作为通信中继,依靠中继节点将收到的数据转发给其他无人机,可以扩展无人机通信网络的覆盖范围[2]。
微型无人机需要移动到中继通信的最佳位置传输数据。中继无人机由初始位置移动到最佳位置的过程中,一方面无人机在移动过程中需要消耗能量为无人机提供动力,另一方面需要消耗能量进行通信。无人机由电池供电,其能量有限,因此优化的无人机的总能耗,延长网络生存时间,对于无人机网络的通信十分必要。
单中继网络的最佳中继位置是其两个节点连线的平分点[5]。中继无人机从初始位置移动到最佳位置做中继,传统的方法是无人机直接沿直线移动到最佳位置做中继。文章提出一种基于数据传输速率梯度变化最大的移动方法,与传统的方法相比,所提出的方法好处在于:1)相同的时间内,传输的数据量最大;2)相同数据量消耗的能耗最少;3)单位数据量消耗的能量最少,效率最高。
1 无人机中继网络
图1所示为单无人机中继示意图,无人机UAV1和UAV3的位置为点S和点D,UAV1代表源节点,UAV3代表目的节点。无人机UAV2的初始位置为R,是UAV1和UAV2的中继节点,M是S和D连线的中点,也是中继节点通信的最佳位置。

图1 无人机中继网络示意图
当无人机UAV1和UAV3距离较大时,由于无人机的通信范围有限,UAV1无法将数据有效的传递给UAV3,因此需要无人机UAV2做中继。无人机UAV2在进行中继时,首先移动到中继最佳位置M,然后悬停进行数据转发。传统的移动方式从中继无人机的初始位置R直接移动到无人机的最优位置M,即路径RM。此方法虽然移动的距离最短,消耗的移动能耗最少,但是无人机的通信条件差,通信能耗较大。文章提出一种基于数据传输速率变化最大的移动路径,即路径RBM。与传统的方法相比,不仅可以获得较大的传输速率,而且单位数据量消耗的能量更少,效率更高。
文章假设在初始时刻,无人机之间的通信是连通的,并且从初始时刻开始边移动边传输数据,能量消耗优化的对象是执行中继任务的无人机。
2 无人机网络的能耗模型
2.1 通信能耗模型
无人机通信能耗主要和通信设备的功耗以及链路的损耗有关,其能量损耗模型如图2所示[6]。

图2 无线传感器网络通信能耗模型
无线传感器网络节点的能量消耗公式如下:
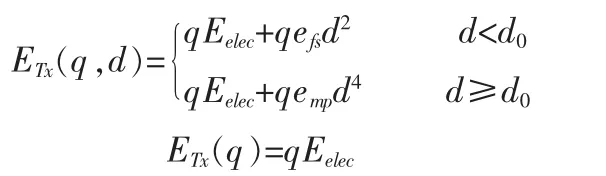
ETx(q,d):向距离为d的节点发射q比特数据向所消耗的能量;
ETx(q):接收q比特数据消耗的能量;
d:无人机节点之间的距离;
Eelec:发射电路消耗的能量,值为50 nJ/bit;
efs,emp:功率放大所需的能量,其值分别为 10 pJ/bit/ m2,0.0013 pJ/bit/m4;
d0:无线传输的距离阈值,其值为100m。
2.2 无人机的动力能耗
文章提到的微型无人机为四旋翼飞行器(文章所说的无人机UAV都是指微型无人机),四旋翼飞行器能够移动和悬停。移动和悬停情况下,无人机的能耗有所不同,用表示无人机的功率(单位:w)[7]。

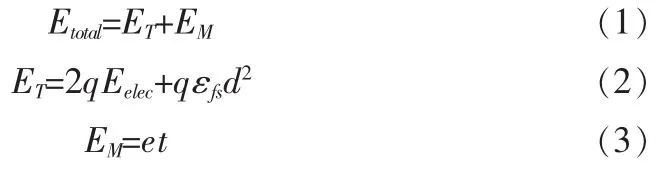
2.3 无人机总能耗
无人机的总能耗(Etotal)包括两部分:通信能耗(ET)和动力能耗(EM)。无人机总能耗的计算方法如下:
3 信道模型
由香浓定理知信道容量

信干比

Pij是节点j向节点i发送数据的发送功率,k是信道增益。dij是节点i和节点j之间的距离,α是路径损耗指数,假设信干比可以代替信噪比SINR,文章用信道容量近似代替数据传输速率。
文章采用管道模型[8],整个链路的数据传输速率为:

cL是链路SRD的传输速率,cSR是UAV1到UAV2传输速率,cRD是UAV2到UAV3的传输速率。
文章将总时间分为许多个Δt时间,Δt足够小,在每个Δt时间内,数据传输速率固定不变,不同的Δt时间内,传输速率不同。
综合公式(1)、(2)、(3)可得:

传输的总数据量

N表示时间段的个数。
如图1所示,决定整个链路传输速率的是链路RD,由可知,快速提高和中较小的,可以提高整个链路的传输速率。RMB路径中,RB路径正好在R和D连线上,RD距离变小是最快的,因此传输速率梯度变化也最快,并且在BM阶段,SR和RD相等,相比于RM路径,RBM路径的传输速率更大。
4 仿真结果和分析
4.1 仿真环境
仿真环境在1 000m*1 000m的平面区域内进行,仿真工具MATLAB2013b,仿真的具体参数如表1所示。
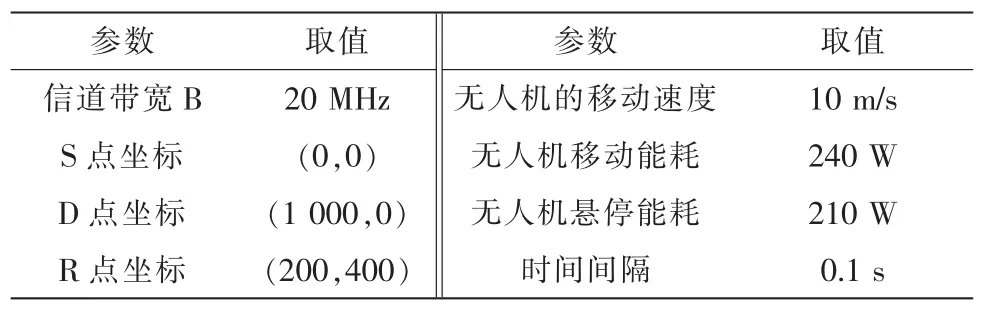
表1 仿真环境的参数值
4.2 仿真结果
图3所示为无人机传输的数据量随时间的变化曲线,仿真结果表明无人机沿路径RBM传输的数据量高于沿路径RM传输的数据量(在41 s时提高幅度达6%),因为无人机在此路径的传输速率较大,如图4传输速率随时间的变化曲线,即使在48~58.5 s之间,无人机沿路径RM的传输速率高于路径RBM,也不影响整个过程传输的数据量。
图5所示为无人的总能耗随传输数据量的变化曲线,从图5可以看出,无人机沿路径RBM移动,消耗的总能量最少,因为无人机在传输相同的数据量时,沿着RBM路径,传输速率大,传输时间段较短,消耗的动力能耗较小;并且RBM路径的RB段,RD距离减少最快,相对的通信能耗较少,总能耗也较少。图6所示为单位数据量消耗的能量随时间的变化曲线,无人机沿路径RBM移动,单位时间消耗的能量最少(在42 s时降低幅度达8%),即效率最高,因为无人机沿路径RBM移动,在相同的时间内,传输的数据量较大,从而单位数据量消耗的能耗较小。

图3 数据量(Q)-时间(t)曲线
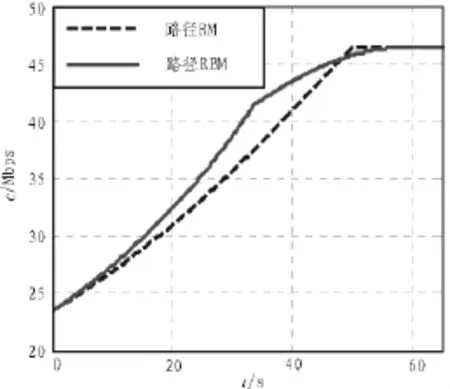
图4 传输速率(c)-时间(t)-曲线
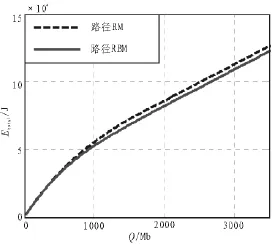
图5 总能耗(Etoal)-数据量(Q)曲线

图6 单位数据量消耗的能量(Etoal/Q)-时间(t)曲线
5 结束语
微型无人机提供的能量有限,能量消耗问题必须考虑。文章所提出的依据数据速率梯度变化最大的路径作为无人机的移动路线,不仅在相同的时间内可以获得较大的数据量,而且单位数据量消耗的能耗较少,效率较高。文章主要优化单中继节点的能耗问题,未来的工作可以考虑多中继节点,并且考虑数据包丢失问题。
[1]Andre T,Hummel K A,Schoellig A P,et al.Applicationdriven design of aerial communication networks[J].Communications Magazine,IEEE,2014,52(5):129-137.
[2]AsadpourM,Vanden Bergh B,GiustinianoD,etal.MicroAerial VehicleNetworks:An ExperimentalAnalysisofChalle-ngesand Opportunities[J].IEEECommunicationsMagazine,2014.
[3]Bekmezci I,SahingozOK,Temel.Flyingad-hoc networks(FAN ETs):asurvey[J].Ad HocNetworks,2013,11(3):1254-1270.
[4]Sahingoz O K.Mobile networking with UAVs:opportunities and challenges [C]//Unmanned Aircraft Systems(ICUAS),2013 International Conference on.IEEE,2013:933-941.
[5]Goldenberg D K,Lin J,Morse A S,et al.Towardsmobility as a network control primitive[C]//Proceedings of the 5th ACM international symposium on Mobile ad hoc networking and computing.ACM,2004:163-174.
[6]Heinzelman W B,Chandrakasan A P,Balakrishnan H.An application-specific protocol architecture forwirelessmicrosensor networks[J].Wireless Communications,IEEE Transactionson,2002,1(4):660-670.
[7]Asadpour M,Van den Bergh B,Giustiniano D,et al.Micro aerial vehicle networks:An experimental analysis of challenges and opportunities[J].Communications Magazine,IEEE,2014,52(7):141-149.
[8]Dixon C,Frew EW.Optimizing cascaded chains ofunman-ned aircraft acting as communication relays[J].Selected Areas in Communications,IEEE Journal on,2012,30(5):883-898.
Research on themobile strategy ofm icro air vehiclesw ith lim ited energy
XU Ma-meng,LIU Hang,XIA Ning
(School of Automation,Northwestern Polytechnical University,Xi'an 710129,China)
Aiming at the problem of energy optimization formicro air vehicles in relay networks,amobile strategy based on maximum gradient change of transmission rate is presented.Through theoretical simulation and comparison with the conventional strategy of linearmovement,the resultsof simulation show thatbased on the proposedmobile strategy,the data size forwarded by UAV is increased by 6%and the consuming energy perunitdata size is reduced by 8%.,so as to improve the efficiency of the implementation of the task.
MAV;motion strategy;relay network;energy optimization
TN925
A
1674-6236(2016)20-0056-03
2015-10-18 稿件编号:201510115
西北工业大学研究生创意创新种子基金(Z2015128)
徐马蒙(1990—),男,河南南阳人,硕士研究生。研究方向:无线通信网络、无人机移动策略。