石英晶片外观缺陷自动分选控制技术研究
2016-11-09张洁李东王艳林北京信息科技大学仪器科学与光电工程学院北京100192
张洁,李东,王艳林(北京信息科技大学 仪器科学与光电工程学院,北京100192)
石英晶片外观缺陷自动分选控制技术研究
张洁,李东,王艳林
(北京信息科技大学 仪器科学与光电工程学院,北京100192)
石英晶片外观缺陷自动分选系统使用ARM处理器作为主控制器,通过控制步进电机来实现对机械臂、料盘和出料桶的控制。采用ARM与PC机相结合的方式对石英晶片进行定位和分选,ARM控制器与PC机之间采用USB总线接口方式进行数据传输,显著提高了运行速度。经验证,本课题实现了对石英晶片自动分选设备的精确控制,其研究成果对于推动我国石英晶片自动分选设备的国产化具有重要的意义。
石英晶片;外观缺陷;控制技术;ARM处理器;自动分选
石英晶体谐振器(以下简称石英晶体)具有频率稳定性好、品质因数高、可靠性好等优点,因此被广泛的用作为电子产品提供同步脉冲和时间频率基准。伴随着电子信息产业的快速发展和科技的进步,石英晶体元器件的市场需求量也急剧扩大。石英晶片是石英晶体封装前的半成品,在生产过程中难免有部分石英晶片出现崩边、缺角、污垢以及划痕等外观缺陷,而这些外观缺陷又会对石英晶片的频率稳定度产生或大或小的影响,进而影响其制成的石英晶体元器件的精度,因此在封装前要先剔除这些带缺陷的石英晶片。
美国S&A公司生产的W-940A是典型的石英晶片自动分选机,250B软件对石英晶片的电参数进行快速准确的测量,该仪器的分选速度可达每小时1 600片,但是价格昂贵,元器件不容易更换,维修不方便。我国目前的石英晶片分选设备主要是南京熊猫机电和丹东市东方晶体仪器有限公司开发的,这些设备都是借鉴国外的先进理论自主创新研发的,和国外的设备相比,这些设备都停留在比较低的水平。本课题组多年来在石英晶片外观缺陷检测算法研究[1]、石英晶片电参数分选控制系统设计[2]、双通道石英晶体快速测量技术方法研究[3]等方面取得了重要成果。随着表贴技术的飞速发展,石英晶片的体积越来越小,产品更新换代越来越快,这就对石英晶片自动分选控制技术的速度和精度提出了越来越高的要求。而我国的控制技术跟国外先进技术相比仍存在很大差距,这是国产分选机与国外设备差距较大的重要原因之一。本课题的研究对于提高我国石英晶片外观缺陷自动化检测水平具有重要的意义。
1 石英晶片外观缺陷分选系统整体设计
1.1石英晶片外观缺陷分选系统概述
石英晶片外观缺陷分选系统由计算机、USB接口电路、ARM控制器、CCD工业相机、机械臂、料盘等器件构成。系统包括定位单元和分选单元两大模块。总体框架图如图1所示。

图1 石英晶片分选控制系统总体框架图
本系统启动后首先通过CCD相机对系统料均匀散落的石英晶片进行拍照,通过相应算法对要拾取的石英晶片进行定位,然后机器臂将定位后的石英晶片拾取到固定区域进行拍照。将拍照得到的石英晶片图像传输到计算机以后利用图像处理[4]的方法完成对石英晶片外观缺陷的检测和分选。最后由ARM控制器实现对机械臂的精确控制完成对石英晶片的分选。
1.2石英晶片定位系统
石英晶片定位系统是石英晶片外观缺陷自动分选系统的重要组成部分,硬件主要包括照相机、入料桶、料盘、机械臂、计算机等部件,软件系统是通过VS 2010利用C++编程语言进行编程。
石英晶片定位系统的工作原理是:首先系统通过CCD相机获取检测平台上待检测石英晶片的图像,并将图像通过USB传输到计算机中以BMP格式存储,然后利用数字图像处理技术对采集到的图像进行去噪、二值化、边缘检测、轮廓检测等图像处理操作[5],最后计算出图像中各个石英晶片的中心像素坐标。计算机根据石英晶片的中心像素坐标,计算出料盘应转动的角度,ARM控制器通过控制料盘转动该角度将石英晶片移动到预定位置坐标,等待分选系统机械臂拾取。图2为定位系统实物图。
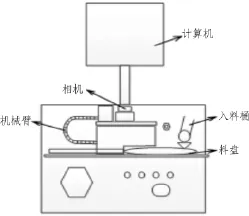
图2 定位系统实物图
1.3石英晶片分选系统
石英晶片外观缺陷分选系统主要由计算机、USB接口、ARM控制器、两个机械臂和CCD相机组成。ARM处理器将控制信号转化为硬件电路的电平信号,电平信号经过驱动电路的处理后驱动振动盘、机械臂、料盘等动作。从图3可以看到CCD相机获取的图片通过USB传送给计算机,计算机通过图像处理技术,按照一定的算法,判定石英晶片是否存在缺陷,机械臂在控制系统的作用下实现对石英晶片的自动分选。系统结构俯视图如图3所示。
石英晶片在入料桶转动过程中将石英晶片送入到1号料盘上,通过定位系统的照相机对晶片进行图像采集,分析料盘上晶片的散落状况,确定单个可取晶片的位置信息,决定1号料盘的旋转角度并进行取片,通过1号机械臂拾取到2号料盘上(见图3)。2号料盘旋转一定角度将晶片送入到相机可采集图片位置,并将图像信息传入到计算机中进行图像处理,判定石英晶片是否存在外观缺陷,最后根据检测结果由2号机械臂将石英晶片拾取到不同的分选料斗中。
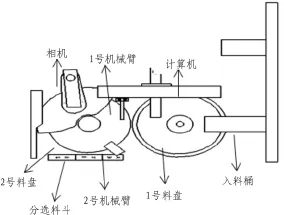
图3 分选系统工作台俯视图
2 石英晶片分选控制系统
2.1ARM处理器的选择
石英晶片外观缺陷自动分选系统采用的是意法半导体公司(ST)生产的STM32F407ZGT6芯片作为分选控制电路板的处理器。STM32F407ZGT6是基于ARM V7架构的Cortex-M4F内核,Cortex-M4F内核采用哈佛结构,其数据总线和指令总线是相互独立的,这样以来数据访问不再占用指令总线,从而提升了性能。STM32F407ZGT6 144个芯片引脚,作为Cortex-M4F内核的顶级性能系列产品,具有以下主要功能特点:
1)极致的运行速度,以168 MHz高速运行时可达到210 DMIPS的处理能力。
2)先进的Cortex-M4内核,浮点运算能力,增强的DSP处理指令。
3)更多的存储空间,高达1M字节的片上闪存,高达196 K字节的内嵌SRAM。
4)FSMC:灵活的外部存储器接口。
5)更高级的外设,新增功能:照相机接口、加密处理器,USB高速OTG接口等。
6)增强功能:更快的通信接口,更高采样率,带FIFO的DMA控制器等。
综上所述,STM32F407ZGT6具有强大的处理能力、丰富的外设资源、杰出的功耗控制,可以为系统带来控制速度快、易于扩展、方便开发的优势。意法半导体公司为用户提供了开发STM32系列处理器的固件库,可以快速的开发产品,缩短开发时间。
2.2控制电路
石英晶片外观缺陷自动分选系统使用ARM处理器作为其主控制器,并且采用ARM与PC机相结合的方式实现对石英晶片的定位和分选。计算机跟ARM的通信及ARM对步进电机驱动的控制都是通过USB通信来实现的。
2.2.1ARM控制步进电机
ARM作为主控制器,一面负责料盘的转动和上料,一面负责控制机械臂工作。而控制机械臂、料盘和出料桶的本质都是通过ARM控制步进电机[6]来实现的。下图是ARM控制步进电机装置整体架构图:
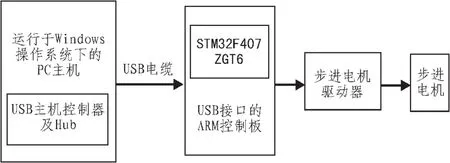
图4 ARM控制板整体架构图
在整个步进电机控制装置中,运行于Windows操作系统环境下的PC主机是整个控制装置的命令发布和运动参数设定中心。主机中的USB[7]主控器,通过USB电缆,将数据发送到ARM控制板。STM32F407中运行的固件代码的作用主要有两部分:第一,对USB传输控制协议所规定通信流程的进行响应,并对接收到的USB总线数据进行处理来设置相应的步进电机控制的全局变量;第二,依照步进电机控制的全局变量,并利用定时器中断对时间计时,从而对步进电机进行驱动控制。步进电机控制板通过两组步进电机驱动口,来分别为步进电机驱动器提供X和Y两个方向上的电机驱动脉冲和方向控制信号。从而实现了PC主机对步进电机的控制。同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.2.2PC机控制CCD相机
PC机主要通过windows系统下的人机交互界面来下达命令,实现对CCD相机的控制。本系统CCD相机采用的MVC5000F彩色数字摄像头是我公司自主研发的遵循USB 2.0标准的高分率、高清晰度、高帧率一体化摄像头。MVC5000F系列产品具有五百万的像素量,清晰度能达到800以上电视扫描线和板级处理功能,从而提供了高质量的图像采集,是选用高性价比解决方案的最佳选择。PC机通过USB2.0接口,不需要额外的采集设备,即可获得实时的无压缩视频数据和对图像的捕捉,由于USB接口支持即插即用,接口体积小巧、节省系统资源、传输可靠、提供电源、良好的兼容性、共享式通信和低成本等优点,使得采用USB接口的CCD相机比采用PCI、光纤及串口等通信方式与上位机进行数据传输更方便,传输速率更高,符合现代通信的要求。实时、快速、准确地将数据通过USB传递给上位机是CCD相机的重点和关键。
2.3步进电机驱动电路
本课题中ARM处理器对料盘、机械臂和出料桶的控制都是通过ARM控制步进电机实现的。步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器[8]接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。为实现系统对步进电机的准确控制,设计实现了接口驱动电路。
石英晶片外观缺陷分选部分步进电机驱动电路有两部分组成:SN74LVC4245DB和510R*4。SN74LVC4245DB共有23个管脚,其中DIO1~DIO8为系统的内部控制信号输入端,A5~A8为 510R*4的信号输入端,其工作原理是:SN74LVC4245DB将3.3V的内部控制信号转化为步进电机需要的5V信号,然后由510R*4将5V信号分别通过P4、P5、P6实现对料盘和两个机械臂的控制。
3 结果分析
为测试石英晶片外观缺陷分选控制系统的性能,进行了多次检测平台上石英晶片的定位与分选控制实验。首先对定位系统进行实验,得到检测平台上各个石英晶片的坐标,然后对ARM控制系统机械臂实验。部分实验数据如表1所示,由实验数据及实验效果证明控制系统能够高效精确地实现对整个石英晶片外观缺陷分选系统的控制。
4 结束语
本以ARM处理器作为石英晶片分选系统的控制中心,实现了计算机和ARM主从控制式。控制系统采用USB总线接口大大提高了运行速度,使用更方便灵活。通过对系统的实验分析结果表明控制速度满足3 600片/h的分选要求,缺陷检测准确度在98.4%以上。自动分选控制技术是自动分选系统的关键技术,其性能影响着整个石英晶片分选系统的效率和精确度。
[1]YANGWan-hua,WANGYan-lin,LIDong.Image processingbased technology for dirt detection of quartz wafer[C]//Proceedings of 2013 IEEE 11th International Conference on Electronic Measurement&Instruments(ICEMI2013),2013.
[2]张俊娟.石英晶片电参数分选控制系统设计[D].北京:北京信息科技大学,2014.
[3]崔栗峰.双通道石英晶体快速测量技术方法研究 [D].北京:北京信息科技大学,2015.
[4]唐朋朋,刘桂礼,李东等.基于OpenCv的石英晶片缺陷检测[J].北京信息科技大学学报,2012,27(3):33-36.
[5]朱冠英.石英晶片表面在线缺陷检测算法研究[D].浙江:浙江大学,2013.
[6]方旭.基于ARM的多通道步进电机控制系统设计[D].成都:西南交通大学2014.
[7]刘俊.基于USB接口的步进电机控制的研究与实现 [D].武汉:华中科技大学,2006.
[8]王宇.基于ARM的表贴石英晶体频率分选控制系统设计[D].北京:北京信息科技大学,2014.
Quartz wafer appearance of defects automatic sorting control technology
ZHANG Jie,LIDong,WANG Yan-lin
(Institute of Instrument Science and Opt-electronics Engineering,Beijing Information Science&Technology University,Beijing 100192,China)
Quartz wafer appearance of defects automatic sorting system uses ARM processor as the master controller,by controlling the steppermotor to achieve the robotic arm trays and a drum of control.ARM and PC are used to realize the localization and separation of quartz crystal.Between the ARM controller and PC data transmission using USB bus interface,significantly improve the operating speed.Proven,the subjectof precise control of the appearance defects of the quartzwafer sorting,quartz crystal appearance defects sorting control system for the promotion of research quartz crystal wafer sorting equipment in China isofgreatsignificance.
quartz crystal;appearance defects;control technology;ARM processor;automatic sorting
TN98
A
1674-6236(2016)19-0125-03
2015-10-17稿件编号:201510108
张 洁(1988—),女,河南商丘人,硕士研究生。研究方向:电子测量技术。
