四自由度行星变速机构方案性能规律研究
2016-11-09李慎龙毛明盖江涛刘树成
李慎龙, 毛明, 盖江涛, 刘树成
(1.北京理工大学 北京电动车辆协同创新中心, 北京 100081;2.中国北方车辆研究所 车辆传动重点实验室, 北京 100072)
四自由度行星变速机构方案性能规律研究
李慎龙1,2, 毛明2, 盖江涛2, 刘树成2
(1.北京理工大学 北京电动车辆协同创新中心, 北京 100081;2.中国北方车辆研究所 车辆传动重点实验室, 北京 100072)
为解决四自由度行星变速机构方案数量大、优选计算复杂的问题,开展四自由度行星变速机构方案性能规律研究。根据四自由度行星传动的构件之间运动学关系,建立方案模型中制动构件、离合器和辅助构件等系数、各挡传动比、行星排特性参数、行星轮相对转速、操纵力矩和效率的数学模型。针对同一机构类型所有可能的方案模型,分析各项性能指标的内部规律,提出按照相同操纵逻辑原则进行构件组模型分类的方法,在传动方案可行性优选时,对于同一类所有构件组模型只需进行一次计算。通过实例计算表明,该方法有效减小了行星传动方案优选计算量,提升了方案优选效率。
兵器科学与技术; 四自由度; 行星传动; 方案性能
0 引言
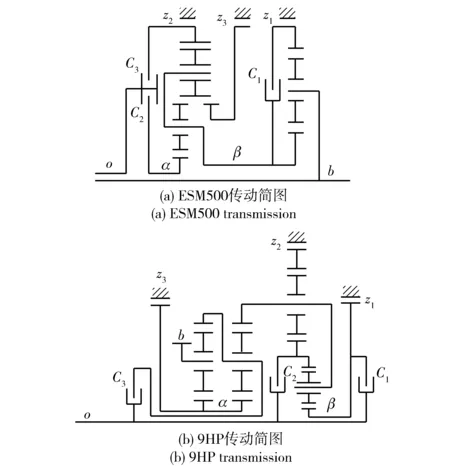
图1 两种四自由度变速方案Fig.1 Two 4-DOF gear transmission schemes
多挡化、紧凑化是车辆变速发展的重要方向。随着车辆变速挡数的增多、行星齿轮制造与装配技术和电子控制技术的发展,行星变速传动方案的自由度数也有逐渐增加的趋势,由早期二自由度发展到三自由度,并逐渐向四自由度传动方案发展[1-3],如法国莱克勒尔Soma Minerva ESM500四自由度自动变速器传动简图(见图1(a))能实现7个不同挡位,其中包括5个前进挡和2个倒挡;德国ZF公司最新推出的9HP四自由度自动变速器传动方案(见图1(b))能实现10个不同挡位,其中包括9个前进挡和1个倒挡。此外,德国ZF公司的8AT和日本Aisin公司的 8AT变速器也都采用了四自由度行星自动变速器。四自由度行星变速机构是指在多个行星排构成的行星轮系中具有4个转速独立的运动构件,为实现确定挡位需要接合3个操纵元件。四自由度行星变速机构能实现多挡化、空损小和结构尺寸紧凑等显著优势[4-7]。图1中,z1~z3为制动构件,C1~C3为离合器,o为输入构件,b为输出构件,α、β为辅助构件。
行星变速方案设计是行星变速机构研制过程中重要的设计阶段,是最具有创造性的阶段,其难点在于:用多个行星排和操纵元件组成来实现需要传动比系列的传动方案,其可能方案数非常多。如用3个行星排、3个制动器和3个离合器组成四自由度方案,理论上可能方案数达到:

(1)

如果在四自由度方案优选时逐一对数以亿或数十亿计的所有可能的方案模型进行传动比验证、行星排特性参数计算和各项性能指标分析,这会带来计算时间过长的问题,严重影响方案设计效率。目前,发达国家对四自由度行星变速方案先进优选理论进行技术封锁,国内尚未见到成体系的指导理论报道。
若能分析所有方案的内在规律,按规律进行方案分类,将满足特定规律的模型作为一个整体来分析计算,这样就可显著提高方案优选效率并减小计算量。基于这种考虑,本文根据四自由度行星传动的构件之间运动学关系,通过公式推导来分析所有可能方案的内部规律,并试图按规律分类进行方案优选。
1 行星传动运动学特性
对于具有四自由度行星传动,任意构件x的转速都可通过输入构件转速no、输出构件转速nb和任意2个转速独立的制动构件转速nz1、nz2来线性表出,则有[4]
nx=axno+bxnb+cxnz1+dxnz2,
(2)
式中:ax、bx、cx、dx为构件系数。若x为基本构件,则满足ax+bx+cx+dx=1关系式;若x为离合器,则满足ax+bx+cx+dx=0关系式。由(2)式可以推导出
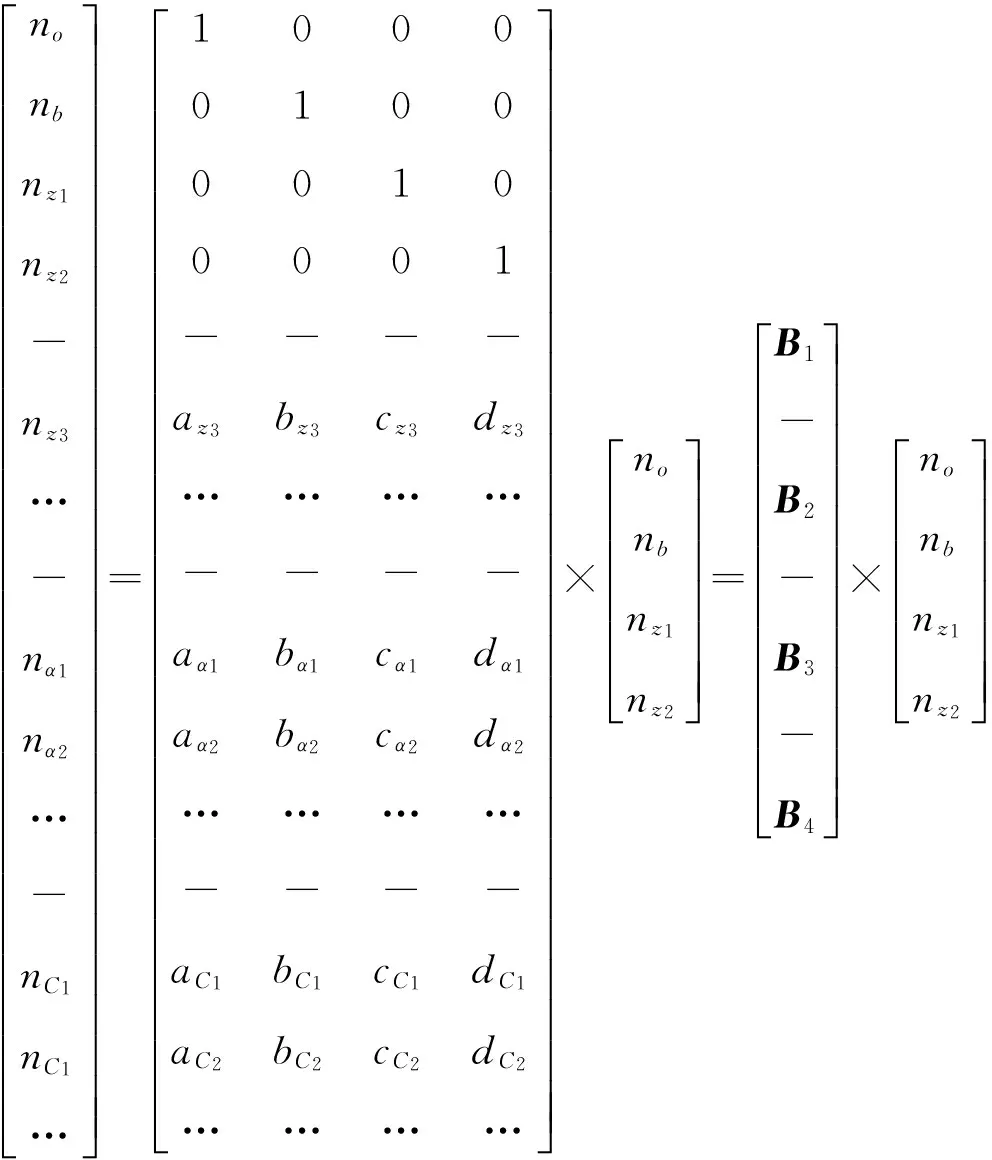
(3)
式中:B1表示独立构件系数矩阵,为单位矩阵;B2表示制动构件系数矩阵;B3表示辅助构件(除输入、输出构件、制动器构件以外的构件称为辅助构件,反之称非辅助构件)系数矩阵;B4表示离合器系数矩阵。对于具体结构型式的传动方案而言。(3)式中各项系数是唯一确定的。
1.1离合器系数计算公式
设离合器Cj用于接合构件x、y,离合器构件系数按(4)式计算:
(4)
1.2制动构件系数计算公式
对于四自由度行星传动实现一个确定的传动比,需要接合3个操纵元件,设3个操纵元件为s1、s2、s3,由(2)式可以推导出,当它们接合时对应的传动比[5]为

(5)
式中:i[s1,s2,s3]为四自由度方案中接合操纵元件s1、s2、s3对应的传动比(以下公式中也采用类似表示方式),s1、s2、s3可以代表某一制动器或离合器。
行星传动方案所能实现传动比是方案选择的主要运动学约束指标。根据传动比(5)式可以推导出四自由度方案的制动构件系数与传动比之间的数学模型。不妨令x1=i[z1,z2,zi],x2=i[z1,z2,Cj],x3=i[z1,zi,Cj],x4=i[z2,zi,Cj],x5=i[z1,Cj,Ck],x6=i[z2,Cj,Ck],则有制动构件系数计算公式:
(6)
式中:
ξ=(x2x4-x3x4x6+x3x4x5+x2x3x6-
x3x5x6-x2x6+x2x5+x3x6-x2x4x5-
x4x5+x4x5x6-x2x3)(x1-x2).
(7)
1.3辅助构件系数计算公式
当辅助构件连接2个行星排时(若连接2个以上的行星排时,可以任取2个排),可以表示为
(8)
式中:行星排p1由x、y、α构件所组成;行星排p2由z、w、α3个构件所组成。由(5)式可以推导出该辅助构件系数与构件x、y、z、w系数之间关系为
(9)
当辅助构件连接1个行星排和1个离合器时,可以表示为
(10)
式中:离合器Cj用于接合构件z、α. 可以推导出该辅助构件系数计算公式为
(11)
当辅助构件连接2个离合器时,可表示为
(12)
式中:离合器Ck用于接合构件y、α. 可以推导出该辅助构件系数计算公式为
(13)
2 行星传动方案性能指标
2.1行星排广义特性参数A
对于由构件x、y、z所组成的行星排,存在如下广义运动学关系[8]:
nx+Any-(1+A)nz=0.
(14)
则特性参数A与构件x、y、z系数之间关系为

(15)
2.2行星轮相对转速
根据普通单星行星排计算方法,可以得出行星轮相对转速为
(16)
式中:s、c、r分别代表构件的太阳轮、框架和齿圈。
2.3操纵力矩
对于没有外力固定支撑的行星变速机构,作用在机构上外力矩只有输入构件的驱动力矩、被动构件的负载力矩和操纵力矩,不考虑啮合损失、轴承和齿轮搅油等损失,则由能量守恒定律可得
Mono+Mbnb+Ms1ns1+Ms2ns2+Ms3ns3=0,
(17)
式中:Mo、Mb、Ms1、Ms2、Ms3分别为输入构件、输出构件和3个操纵元件所承受的转矩。将(2)式代入(16)式中,且令输入构件转矩为单位值Mo=1,则3个操纵元件所需操纵力矩为
(18)
当仅有1个制动器zi(i>2)参与接合时,则(18)式转化为
(19)
对于其他接合方式,可以进行类似推导。
2.4效率模型
采用相对功率法进行方案效率计算,该方法原理简单,计算容易,且有足够精度。多排行星传动效率损失等于各排相对功率损失之和,其效率η计算公式为
1-[(1-ηx1)γ1+(1-ηx2)γ2+…],
(20)
式中:Po为输入构件功率;Ps1、Ps2分别为各行星排功率损失;ηx1、ηx2分别各行星排的相对运动效率,决定于行星排的啮合次数和结构,对于普通行星排的相对运动效率取为0.95,双星行星排的相对运动效率取为0.92;γ1、γ2为各行星排的相对功率系数,计算公式为
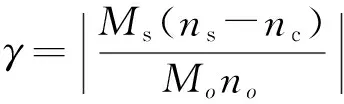
(21)
式中:Ms为行星排太阳轮的转矩;ns为行星排太阳轮的转速;nc为行星排框架的转速。
通过上面所得到的各基本运动件转速和转矩,根据(20)式和(21)式就可求出对应工况的传动效率η.
3 四自由度变速方案的内在规律分析
对于行星传动方案,根据方案传动比(5)式以及第2节所列指标计算公式,可以得出如下规律:
1)由(5)式可以得出:具有相同操纵元件操纵逻辑的方案模型,对应的操纵元件系数相同,它们能实现的传动比是相同的。
2)由(15)式可以得出:对于具有相同操纵逻辑的方案模型,由相同非辅助构件所组成的行星排特性参数A值相同。
3)由(16)式可以得出:具有相同操纵逻辑的方案模型,由相同的非辅助构件所组成的行星排的行星轮相对转速相同,且任意2个非辅助构件的转速差相同。
4)由(18)式和(19)式可以得出:具有相同操纵逻辑的方案模型,它们的制动器操纵力矩相同;方案模型中由相同非辅助构件所组成的离合器操纵力矩都相同;对于仅有1个制动器参与操纵的工况,该制动器对应的操纵力矩仅与传动比有关且等于传动比减1.
图2所示为4n3p3Z3L(自由度n=4、行星排数p=3、制动构件数Z=3、离合器数L=3)结构类型中具有相同操纵逻辑的12组方案模型,其中横线上方每一行表示1个行星排,下方每一行表示1个离合器,“]”表示二自由度机构。
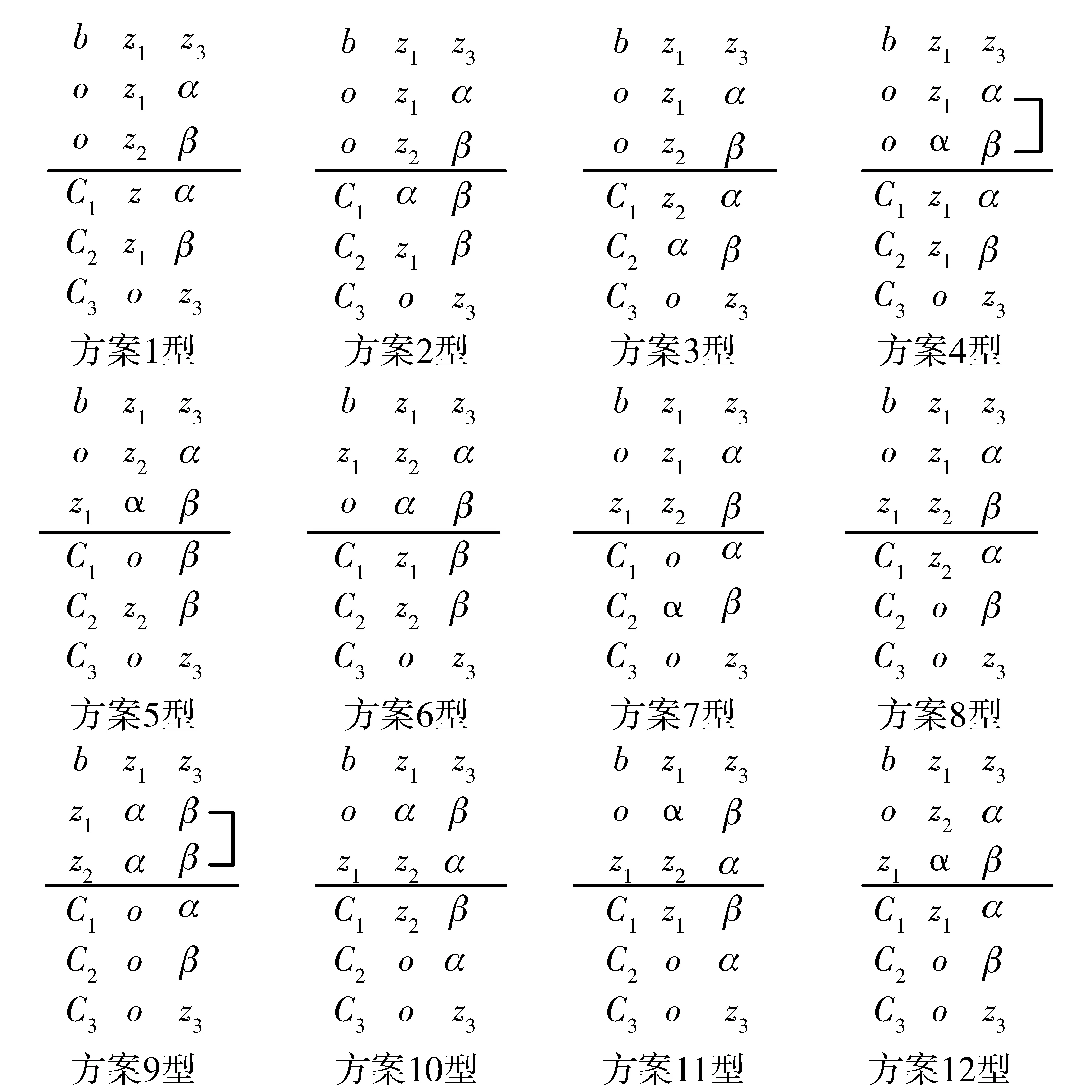
图2 4n3p3Z3L结构类型中互为相同操纵逻辑的方案模型Fig.2 4n3p3Z3L schemes with same control logic
根据各挡位传动比数学模型的性质来分,存在着独立挡和函数挡之分。独立挡是指这些挡的传动比在行星排特性参数的合理范围内可独立选择,不受其他挡位传动比的影响,即与其他传动比之间无函数关系,在方案设计时易于满足给定的传动比要求,独立挡的各传动比确定后,函数挡的传动比也就由函数关系而相应确定,不能独立选择[1]。

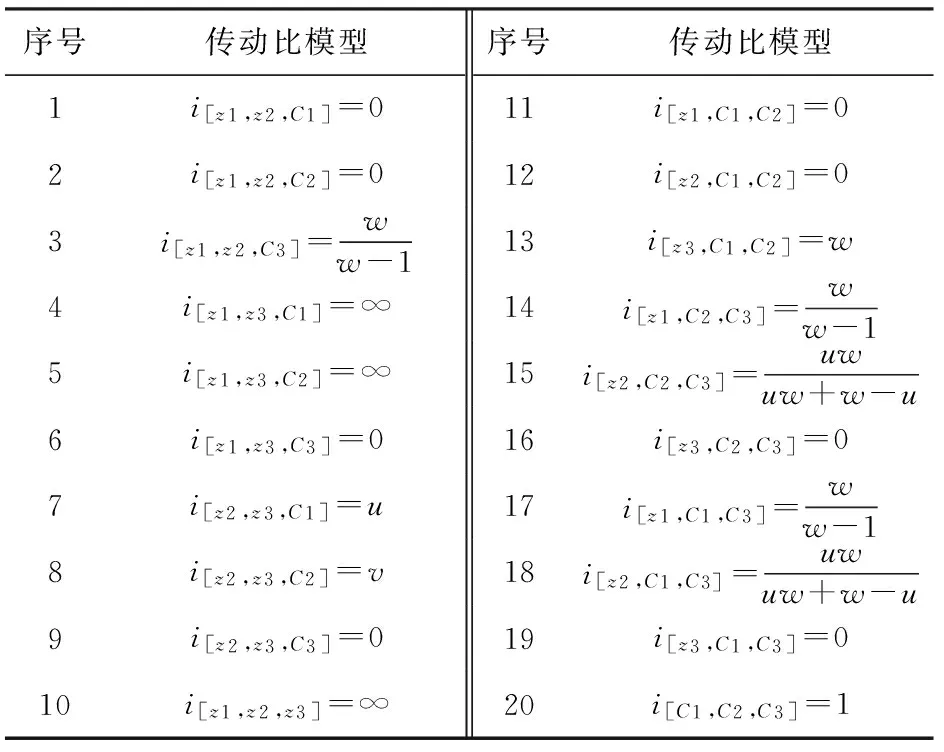
表1 所有可能的结合工况传动比模型
从表1可以看出,每组方案模型中的各结合工况的传动比关于u、v、w的表达式相同。按照规律2得出,这些模型中共有的非辅助构件所组成的行星排[b,z1,z3]广义特性参数A1都等于-1/z.
根据上述规律,图2所示12组模型是互为相同操纵逻辑的,在寻找所有可行的传动方案时,可以将每一组模型作为一个整体来进行分析,从而大大减小了方案设计的计算量,若方案选择时,需同时比较传动比、行星排特性参数、行星轮相对转速、操纵力矩4个指标,如果按照相同的操纵逻辑进行归类处理,那么全部优选计算量是原来的,可见能够大大减少四自由度方案优选的计算量。
4 四自由度方案优选实例
本文所提出上述方法可适用于单星排和双星排,对复合排可以拆分成单星排和双星排的组合进行分析。以法国莱克勒尔Soma Minerva ESM-500变速装置设计要求为输入条件,由3个普通单星行星排、3个制动器和3个离合器组成的四自由度传动方案(即为4n3p3Z3L),需要实现的各挡传动比为i1=7.6,i2=4.5,i3=2.86,i4=1.58,i5=1.0,i-1=-1.9,i-2=-5.39. 依据车辆总体性能匹配要求,各挡传动比允许的相对误差为R1=0.05,R2=0.02,R3=0.01,R4=0.01,R5=0,R-1=0.01,R-2=0.05,行星排特性参数A为1.45~4.50,行星轮相对转速npc≤3.0no,操纵力矩Mφ≤5.0Mo,各挡位传动效率η≥0.80(设置较低的传动效率阈值,主要为了方案优选时提供更多的可行备选方案,实际优选出的方案效率一般大于0.9)。
将上面设计条件输入到该设计系统中,计算大约需要计算时间5 h(以某Intel酷睿II双核2.83 GHz处理器的PC机机时计算),得出87个满足传动比系列且行星排特性参数合理的方案,进一步对其进行性能和结构分析知,仅有5个可行方案,如图3所示,图3(a)~图3(d) 4个方案为具有相同操纵逻辑的方案,各挡位下z1、z2、z3制动构件操纵力矩相同;由相同构件组成的行星排特性参数相同及其各挡位下行星轮相对转速相同,如方案1和方案2的第1、第3行星排太阳轮、行星架和齿圈都是由相同构件组成,致使第1、第3行星排A值相同及其各挡位下行星轮相对转速都相同,但第2行星排太阳轮、行星架和齿圈不是由相同构件组成,致使第2行星排A值不同及其各挡位下行星轮相对转速也不相同,验证了相同操纵逻辑的方案下相同构件组成的行星排A值及其各挡位下行星轮相对转速相同的分析结论;由相同构件组成的离合器操纵力矩相同,如方案1和方案2的C1、C2和C33个离合器都是用于接合相同两个构件,致使这3个离合器各挡位下操纵力矩都相同(参见表2~表4)。图3(e)中方案5与前4种方案为具有不同操纵元件的方案(见表(3))。
考虑到可以采用复合行星排代替单星排和双星排,将图3(a)方案的第1排行星架和齿圈进行互换,行星排由普通单星行星排变成了双星行星排,对应行星排特性参数为-2.9,即可获得Soma Minerva ESM-500行星变速机构方案。这也验证了本文所提出的规律的正确性。
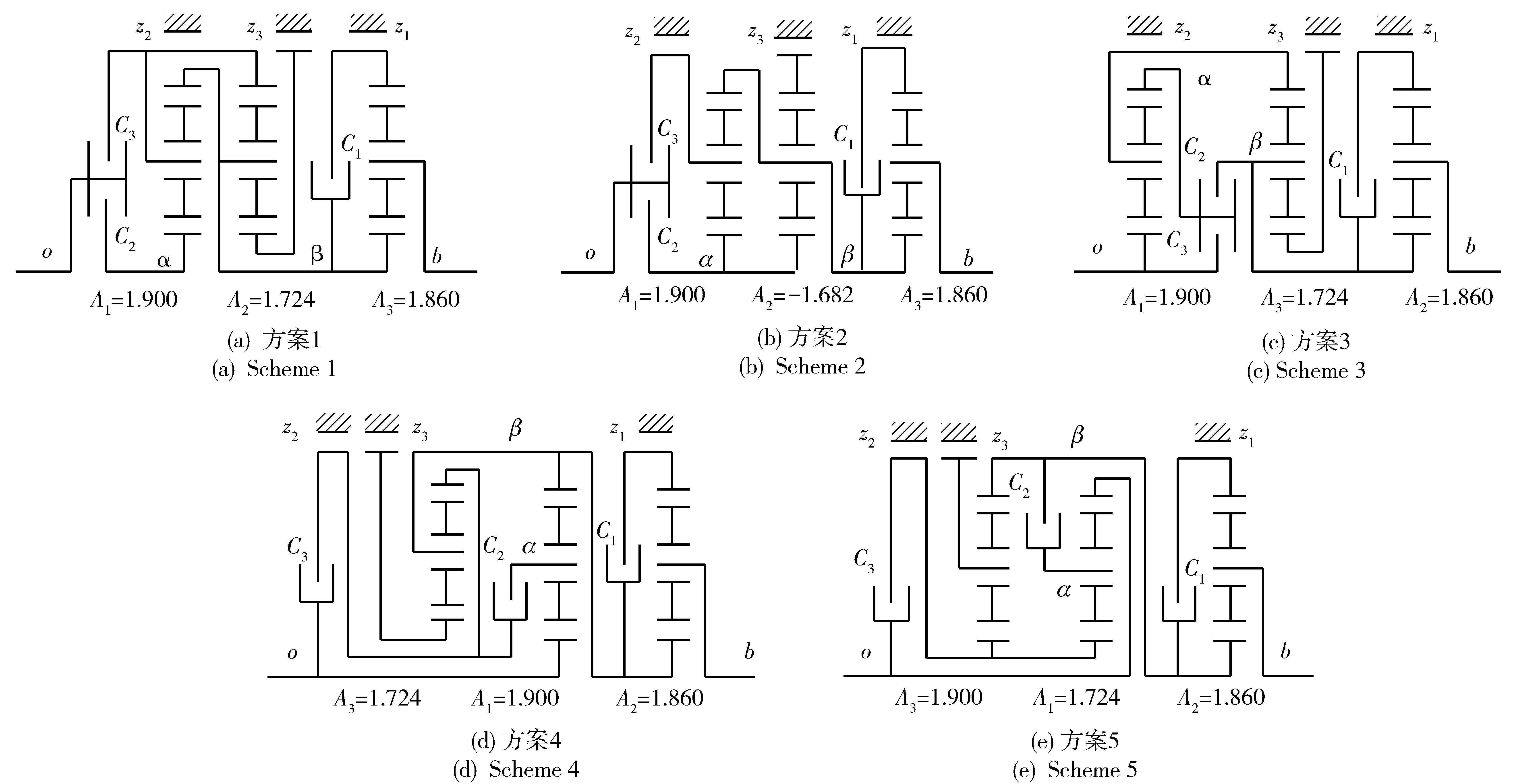
图3 5个性能较优且满足设计需求的可行方案Fig.3 5 feasible schemes to meet the design requirements

挡位操纵元件传动比操纵力矩效率方案1方案2方案3方案41挡C2,z1,z37.6711.000,4.989,1.6820.91830.93710.91830.91832挡C3,z1,z34.5191.000,2.939,0.5800.94970.93850.94970.94973挡C2,C3,z12.8600.526,1.526,1.8600.96750.96750.96750.96754挡C1,C3,z31.5801.028,1.000,0.5800.98160.97000.98160.98165挡C1,C2,C31.0000.650,0.526,1.5261.00001.00001.00001.0000倒1挡C2,z1,z2-5.4341.000,3.534,2.9000.91910.91910.91910.9191倒2挡C1,C2,z2-1.9001.236,1.000,2.9000.95000.95000.95000.9500
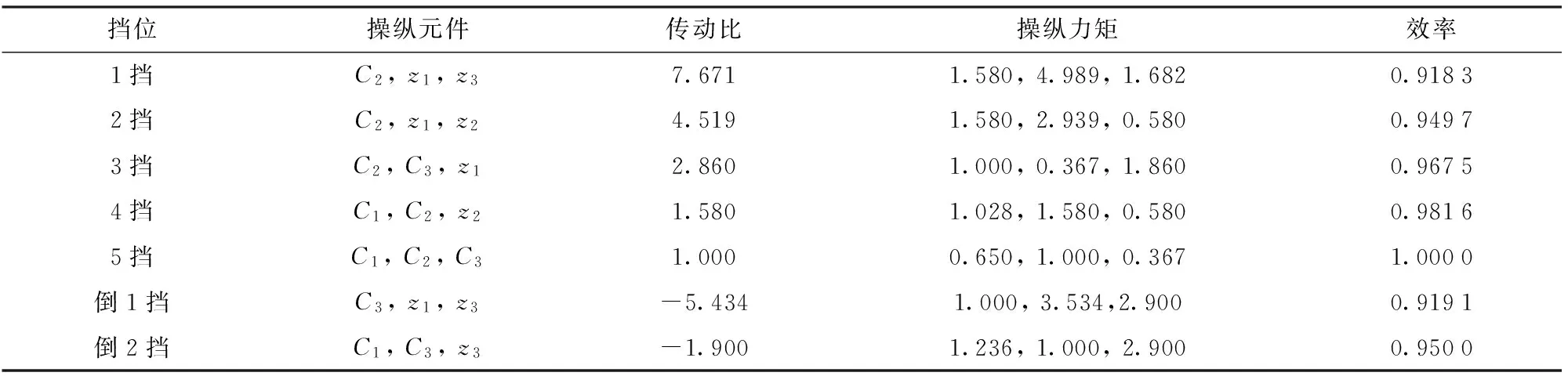
表3 方案5计算结果

表4 各方案行星轮相对转速
5 结论
1)根据行星传动性能指标的计算公式,找到了相同操纵逻辑的构件组模型能实现的传动比、由相同非辅助构件所组成的行星排特性参数及其行星轮相对转速、由相同的非辅助构件所组成的离合器操纵力矩和制动器操纵力矩之间的规律,这些指标之间的规律,可以用于指导四自由度行星传动方案优选。
2)以操纵逻辑相同为原则对构件组模型进行分类,在传动方案可行性优选时,对于同一类的所有构件组模型只需进行一次计算,包括验证各挡传动比是否在允许的误差范围内,以及非辅助构件所组成的行星排特性参数是否合理,这样可以有效地减小方案优选时间和计算量,提高方案设计效率。
References)
[1]李慎龙. 基于图论的行星变速传动方案计算机辅助设计[D]. 北京:北京理工大学, 2009.
LI Shen-long. Computer aided design of planetary transmission scheme based on graph theory [D]. Beijing: Beijing Institute of Technology, 2009. (in Chinese)
[2]刘修骥. 汽车型行星变速箱设计[M]. 北京:北京工业学院,1975.
LIU Xiu-ji. Design of automobile planetary gear transmission [M]. Beijing: Beijing Institute of Technology, 1975.(in Chinese)
[3]Liu X J. Design of muti-speed of planetary transmission[M]. Beijing: Beijing Institute of Technology Press, 1992.
[4]刘修骥. 车辆传动系统分析[M]. 北京:国防工业出版社, 1998.
LIU Xiu-ji. Analysis of vehicle transmission system [M]. Beijing: National Defense Industry Press, 1998.(in Chinese)
[5]万耀青, 刘太来. 行星变速箱方案选择理论与优化[M]. 北京:国防工业出版社, 1997.
WAN Yao-qing, LIU Tai-lai. Planetary transmission scheme selection theory and optimization[M]. Beijing: National Defense Industry Press, 1997.(in Chinese)
[6]Gumpoltsberger G. Systematische synthese und bewertung von mehrgängigen planetengetrieben[D]. Chemnitz: Technischen Universität Chemnitz, 2010.
[7]Jörg Müller. Beitrag zur systematischen, rechnergestützten synthese und bewertung mehrgängiger konventioneller und hybrider planetenautomatikgetriebe[D]. Chemnitz: Technischen Univer-sität Chemnitz, 2011.
[8]饶振钢. 行星传动机构设计[M]. 北京:国防工业出版社,2004.
RAO Zhen-gang. Design of planetary transmission mechanism[M]. Beijing: National Defense Industry Press, 2004. (in Chinese)
Study of Scheme Characteristics of 4-DOF Planetary Gear Transmission Mechanism
LI Shen-long1,2, MAO Ming2, GAI Jiang-tao2, LIU Shu-cheng2
(1.Collaborative Innovation Center of Electric Vehicles in Beijing, Beijing Institute of Technology, Beijing 100081, China; 2.Science and Technology on Vehicle Transmission Laboratory, China North Vehicle Research Institute, Beijing 100072, China)
In order to solve a huge amount of complex optimization calculation of 4-DOF planetary gear mechanism schemes, the scheme characteristics of four-degrees-of-freedom planetary gear transmission mechanism are studied. According to the kinematic relationship among the components of four degrees-of-freedom planetary gear transmission, a mathematical model is established for the coefficients of braking component, clutch and auxiliary component, the gear ratios, the characteristic parameter of planetary gear row, the relative speed of planetary gear, the control torque and efficiency in scheme model. For all possible scheme models with same mechanism, the internal rules of the performance indexes are analyzed to provide a theoretical basis for model classification. A method of component group model classification based on the same control logic principle is put forward. The same kind of component group models can be calculated for one time by using the proposed method for choice of feasibe transmission schemes. The calculated results shows that the proposed method can be used to reduce the optimization calculation of planetary transmission schemes, and improve its efficiency.
ordnance science and technology; 4-DOF; planetary gear transmission; scheme performance
2016-01-07
国家探索研究项目(7131458)
李慎龙(1982—),男,研究员,博士。E-mail: lishenlong2004@sina.com;
刘树成(1986—),男,工程师,博士。E-mail:liushucheng@vip.126.com
TJ81+0.321
A
1000-1093(2016)10-1770-08
10.3969/j.issn.1000-1093.2016.10.002
