一种地面防空编队抗饱和攻击能力的算法设计
2016-11-08杨丹丹方洋旺杨鹏飞
杨丹丹 方洋旺 杨鹏飞
(空军工程大学航空航天工程学院 陕西 西安 710038)
一种地面防空编队抗饱和攻击能力的算法设计
杨丹丹方洋旺杨鹏飞
(空军工程大学航空航天工程学院陕西 西安 710038)
为合理部署地面防空编队队形,基于拦截批次最大化原则,提出一种计算地面编队抗饱和攻击能力的算法。首先建立敌方导弹和地面编队模型,得到了敌方导弹和地面编队之间的相对距离;然后计算地面编队的探测概率;最后根据相对距离和探测概率模型,得到了计算地面编队抗饱和攻击能力的算法。仿真结果表明,基于该算法所设计的队形在威胁范围内防御能力均衡,抗饱和攻击拦截批次能力强。
抗饱和攻击拦截批次队形优化
0 引 言
未来战场上,地面防空编队的合理部署对于抗击多方来袭导弹具有重要作用。地面防空编队队形设计是指在一定的威胁环境和有限的作战资源条件下,合理设计各个作战单元的位置关系,使得地面防空编队有效地保护地面重要目标。可见,研究地面防空编队队形的优化设计,对提高编队战斗力具有重要意义。
目前,对于编队的研究主要集中在飞机、无人机及舰艇编队的研究。文献[1]提出了一种基于动作的编队飞行控制方法,该方法减小了无线数据更新速率并增强了无人机规避障碍的能力。在编队相对稳定条件下,这种新方法不仅能够增强无人机在未知环境中规避障碍和威胁的能力,而且在低海拔无人机协同渗透中被用作重要参考。文献[2]基于分散饱和的非线性控制器和leader-follower结构,提出了一种多元一致性算法,该算法在多架微型旋翼飞机系统的编队飞行控制和弹道跟踪控制中取得较好的效果。文献[3]采用基于神经网络的控制策略设计线性二次控制器,对实际的leader-follower结构编队进行仿真,验证了该结构可以提高编队飞行的稳定性。文献[4]根据动态建模和编队控制方法,设计编队控制器用于弹道跟踪和编队队形保持。文献[5]分析了导弹编队协同控制系统的框架,设计了一种编队协同作战优化保持器,并利用精确综合算法解决控制器优化和编队控制问题。文献[6]根据舰船编队的空间特征、反舰导弹射击流和动态作战的数字特征,建立了协同抗饱和攻击模型,得出反舰导弹的密度是影响舰艇编队抗饱和攻击能力的重要因素。文献[7]提出一种改进的DBS实现方法。该方法首先估计舰船目标的总体速度,然后根据舰船速度和导弹速度划分多普勒方向进行舰船的编队设计。文献[8]中研究了多种典型防空队形的应用,如菱形、人字形、梯形等。文献[9]主要研究了水面舰艇队形的优化配置,为水面舰艇队形的优化配置提供了新的思路。
编队机动作战,已成为地面防空在信息化作战条件下的主要作战形式之一。信息化条件下地面防空编队机动作战的主要特点包括四点:第一,目标明显,隐蔽部队行动比较困难。由于敌方具有多维战场侦察监视能力和“发现即打击”能力,而我方地面防空编队装备数量多、体积大,伪装隐蔽手段落后,目标特征十分明显。第二,走打结合,战法运用较灵活。地面防空编队作战目的是寻机歼敌并防敌打击。在一定意义上,地面防空编队作战既是积极防空作战思想的具体运用,也是一种较为有效的战场防护手段。其采用走打结合的方式,将打防融为一体,作战方式变换较快,战场运用较为灵活。第三,战机难寻,机动作战时效性较强。地面防空编队机动作战的关键是创造和捕捉战机。信息化条件下,创造和捕捉战机出现了一些新的情况:一是空袭与反空袭作战节奏变化快,出现战机的不确定性增大,预测战机难度增大;二是战场环境对敌透明,于我方若明若暗,捕捉战机难度增大;三是敌方具备迅速查明和改变不利态势的战场应变能力,反机动作战能力强,战机持续时间缩短,把握战机难度增大。这些情况使得战场态势急剧变化,战机稍纵即逝,对地面防空编队机动作战的时效性提出了更高的要求。第四,战场不定,战勤保障难度较大。地面防空编队机动作战,是在一定战役地域内组织展开的,编队阵地位置始终处于动态变化之中,这就使得情报、通信保障和后勤、装备保障也始终处于一种流动的战场环境之中。
纵观国内外文献,目前对于地面防空编队队形的部署研究还比较少。因此,本文首先建立敌方导弹和地面编队模型,以得到敌方导弹和地面编队之间的相对距离;然后构建地面编队的探测区模型,计算地面编队的探测概率;最后根据上述模型,得到一种计算地面编队抗饱和攻击能力(抗饱和攻击能力是指拦截敌方多枚导弹或其他攻击力量的抗打击能力,是衡量一个防空系统的性能的主要指标)的算法。
1 敌方导弹和地面编队的相对距离
1.1敌方导弹模型

(1)
式中:vm(t)为敌方导弹的速度函数;αm(t)、βm(t)分别为导弹方位角和俯仰角。
当敌方发动饱和攻击时,敌方导弹可能多方向来袭,方向记为(D1,D2,…,Dn,…)。设第1枚敌方导弹在时刻tDn,0从方向Dn发射,因此第j枚敌方导弹的发射时间为:
(2)

1.2地面编队机动模型
记地面编队总数为M,对其进行编号i=1,2,…,M。设第1枚敌方导弹的发射时刻为t0。地面编队位置可描述如下:
At0={At0,i}Mi=1
(3)
(4)

若编队以速度V=(Vx,Vy,0)行进并保持队形,则在任意给定时刻t(t>t0),第i个单元的坐标为:
At,i=At0,i+(t-t0)·V
(5)

(6)
2 地面编队探测概率模型
设地面搜索雷达数量为N,每个雷达搜索区域为Zd,k(k=1,2,…,N)。则地面编队的协同探测区Zd为:
(7)

(8)
式中,Pk,ja为第k个地面雷达的虚警概率,PRk,0为已知距离Rk,0时的探测概率。当地面编队搜索雷达形成组网时,N部地面雷达对第j枚敌方导弹的探测概率为[11]:
(9)
3 地面编队抗饱和攻击能力的算法
3.1基本假设
为方便设计,作如下假设:
(1) 地面编队各单元之间相对位置不变,即不考虑编队队形的变化;
(2) 来袭导弹的初始目标设定为指挥部;
(3) 探测发现来袭导弹后不会丢失,且防空系统发射导弹拦截不影响探测效果;
(4) 编队发现来袭导弹时由指挥部统一指挥编队内任一单元发射防空导弹进行拦截,拦截准备时间(含发射)均为7秒,拦截路径为最快相遇;
(5) 为防止误伤,当来袭导弹进入地面编队Zd范围内时,不能使用导弹拦截,且拦截弹道不能通过其他单元Zd范围;
(6) 为充分利用防空反导部队的拦截能力,探测到目标后,优先选择距离来袭导弹近的护卫单元进行拦截。
3.2算法步骤
当敌方导弹对指挥部进行饱和攻击时,首先计算编队对敌方导弹的最大拦截批次,以确定编队的危险方向,调整编队完成队形部署。根据前述条件,设计计算地面防空编队抗饱和攻击能力的算法,如图1所示。算法步骤如下:
Step1在仿真过程中,根据导弹位置先进行判断。若敌方导弹有一次通过编队的Zd范围,则认为所有批次导弹均完全被探测,无需计算探测概率;若敌方导弹未通过地面编队的协同探测区,可根据地面编队搜索雷达与敌方导弹相对距离计算我方雷达探测概率。
Step2按照最快相遇原则,计算预计的拦截点和拦截弹道,通过任务分配过程中两个虚线菱形模块进行判定。
Step3约束条件限制在拦截任务分配环节,每一个任务分配都符合最终拦截成功的所有条件。
Step4计时环节和标志更新模块,完成编队计时和标志更新工作,编队接受任务后7 s可将标志更新为可用。
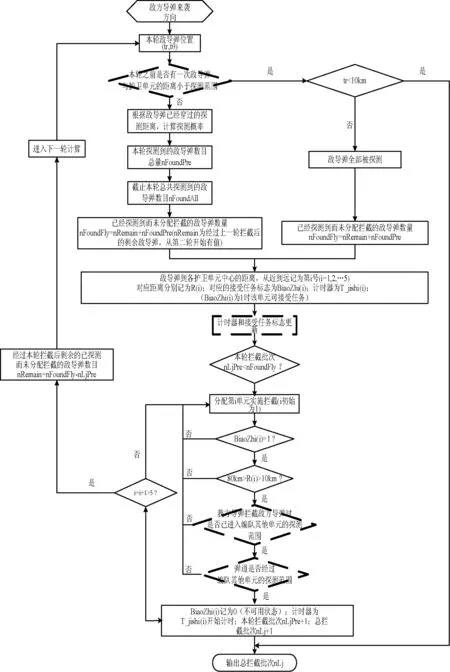
图1 确定方向上的最大拦截批次的算法流程图
4 仿真实验
4.1战场想定
我方由1个防空导弹部队和4个导弹护卫单元组成地面编队在某开阔地域巡逻,护卫单元分别编号(1,2,3,4),其中防空反导部队为指挥部,重要性最大。以指挥部为原点的20°~220°扇面内的方向上,有导弹来袭的可能性相等。为保证兼顾每个可能来袭的方向,护卫单元以过指挥部(20°+220°)/2=120°度线成轴对称分布。
考虑护卫单元探测范围完全覆盖角度范围,以最大限度利用所有作战单元的探测和攻击能力,编队防空队形初步设计如图2所示。
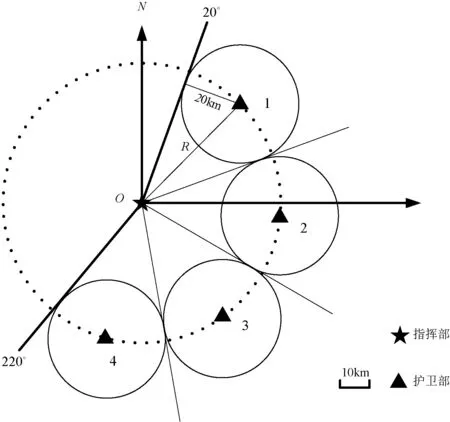
图2 编队防空队形初步设计
其中,护卫单元与指挥部的距离R满足角度关系:
(10)
解得R=47.324km。以指挥部为极点、正北方向为极轴正方向建立极坐标系,则四个护卫单元的极坐标如表1所示。称此极坐标下的队形为队形1。
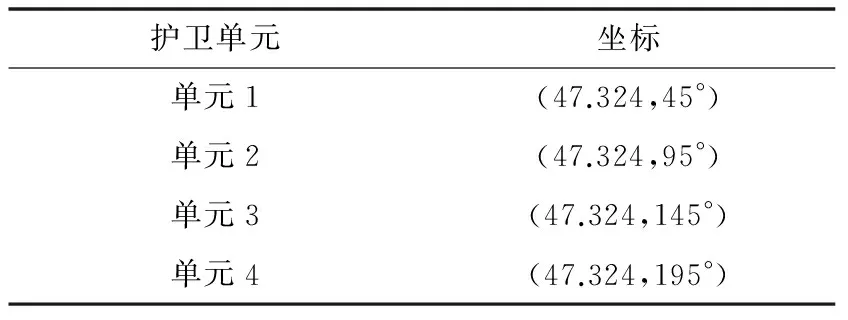
表1 队形1中4个护卫单元的极坐标
编队的危险方向无法通过单纯定性分析得到,理论分析只能得到可能的危险方向。针对所涉及阵型,敌方导弹最安全的方向是沿径向穿过外围部队进攻指挥部。在两个威胁边界处,我方编队距离较远,火力较弱,也是可能的危险方向。因此选取20°、45°、95°、145°、195°和220°六个典型方向D1~D6分析其抗饱和攻击拦截批次。根据算法流程计算抗饱和攻击拦截批次如表2所示。
表2 队形1在6个典型方向上抗饱和攻击拦截批次
分析表2可得,队形1在拦截方向上具有对称性。在D1、D6两个方向上,拦截批次明显小于其他方向,即该方案防空编队的整体资源向D3、D4方向倾斜。为了增加最危险方向上的抗饱和攻击拦截批次,必须将D3、D4方向的部分优势进行转移。
4.2最佳队形设计
对队形1的改进为:将D3、D4方向上的优势转移到D1、D6的危险方向上,应该保证D1、D6两个危险方向上的探测优势,即将护卫单元2和3向后移动,削弱其探测能力,将其火力优势向两个危险方向D1、D6转移。在向后移动的过程中,存在最优极径,使得编队整体防御在各个方向上达到均衡。同时必须考虑以下几个方面:
(1) 为了保证编队在威胁范围内的对称性,护卫单元2和3的移动是对称地沿设计好的径向方向移动,并保证其极角不变;
(2) 护卫单元2和3的极径存在一个最优解,使得编队在最危险方向上抗饱和攻击批次最大;
(3) 编队的危险方向随着单元2和3极径的变化而变化。
为了保证整个威胁范围的完全可探测,选择前述6个典型方向,极径的寻优范围为从初始的单元2和3极径到队形1的距离R。设计寻优算法计算最优极径,寻优的基本流程如图3所示。
图3 寻找最优极径流程图
根据抗饱和攻击拦截批次最大化原则,经过计算得极径的最优解为rmax=36.300 km,由此可得最佳队形设计如图4所示。
图4 最终设计最佳队形
四个护卫单元的极坐标如表3所示。
表3 最佳队形中4个护卫单元的极坐标
由于敌方导弹在拦截区域停留时间越长,危险等级越高,故危险方向可能出现在D1、D6两个边界(编队火力覆盖劣势区域)和D2、D3、D4、D5四个穿过护卫单元所在位置的方向。依据算法计算每个方向上的最大拦截批次,结果如表4所示。
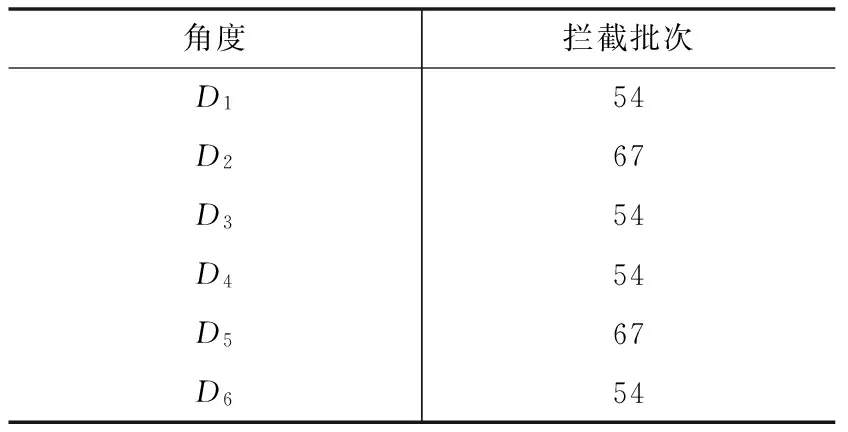
表4 最佳队形在6个典型方向上抗饱和攻击拦截批次
4.3仿真结果分析
通过将优势方向的部分能力转移到劣势方向,D3、D4方向上的拦截批次降低,但是D1、D6的拦截批次大大增加。通过仿真数据可以看出,所设计的最佳阵形,在最危险方向上最大拦截批次为54批。该队形在威胁范围内防御能力均衡,编队拦截能力在威胁范围内具有对称性。
编队最佳防空队形为:在以指挥部为极点、正北方向为极轴正方向的极坐标内,4个护卫单元的坐标分别为单元1(47.324,45°)、单元2(36.300,95°)、单元3(36.300,145°)、单元4(47.324,195°)。最佳队形抗饱和攻击拦截能力在威胁范围内具有对称性,在各个方向上拦截导弹批次能力基本相同,可以有效预防敌方从任何方向发动的饱和攻击。
5 结 语
本文根据拦截导弹批次最大化原则(即抗饱和攻击能力最强),提出了一种计算地面防空部队抗饱和攻击能力的算法。基于该算法,在保证编队可探测区域完全覆盖威胁方向的前提下,设计了一种地面防空编队队形的合理部署方案,使得在最危险方向上,地面防空编队抗饱和攻击拦截批次最大。仿真结果表明:对称均匀的队形布局,在威胁方向上抗饱和攻击能力最大,并且在整个威胁范围内防御能力均衡,为地面防空编队的队形优化设计提供了新思路。
[1] Cai D,Sun J,Wu S.UAVs Formation Flight Control Based on Behavior and Virtual Structure[C]//Asia Sim 2012,2012:429-438.
[2] Jose Alfredo Guerrero,Pedro Castillo,Sergio Salazar,et al.Mini Rotorcraft Flight Formation Control Using Bounded Inputs[J].Journal of Intelligent and Robotic Systems,2012,65(1-4):175-186.
[3] Rinaldi F,Chiesa S,Quagliotti F.Linear Quadratic Control for Quadrotors UAVs Dynamics and Formation Flight[J].Journal of Intelligent and Robotic Systems,2013,70(1-4):203-220.
[4] Fabrizio Giulietti,Mario Innocenti,Marcello Napolitano,et al.Dynamic and control issues of formation flight[J].Aerospace Science and Technology,2005,9(1):65-71.
[5] Changzhu Wei,Yi Shen,Xiaoxiao Ma,et al.Optimal formation keeping control in missile cooperative engagement[J].Aircraft Engineering and Aerospace Technology,2012,84(6):376-389.[6] Zeng J,Zhong J,Xie Y,et al.Research on Anti-Saturation Attack Model of Ship Formation for Anti-ship Missile Targets[J].Applied Mechanics and Materials,2014,615:276-281.
[7] Qiu Q M,Zhang L R,Yi Y S.Study on ship-formation detection by missile-borne radar using DBS imaging algorithm[C]//Antennas,Propagation and EM Theory,8th International Symposium on.IEEE,2008:653-656.
[8] 高善民.水面舰艇编队队形[J].海军大连舰艇学院学报,2000,17(2):12-17.
[9] 李永刚.舰艇编队对空防御队形优化配置模型[J].情报指挥控制系统与仿真技术,2004,26(4):65-67.
[10] Wang G H,Sun X F,Zhang L P,et al.Saturation attack based route planning and threat avoidance algorithm for cruise missile[J].Journal of Systems Engineering and Electronics,2011,22(6):948-953.
[11] Guo Z X,Jiang J.Computation model of radar detection probability with various distances[J].Journal of Air Force Radar Academy,2003,17(4):7-9.
AN ALGORITHM DESIGN FOR ANTI-SATURATION ATTACK CAPABILITY OF GROUND ANTIAIRCRAFT FORMATION
Yang DandanFang YangwangYang Pengfei
(CollegeofAeronauticsandAstronauticsEngineering,AirForceEngineeringUniversity,Xi’an710038,Shaanxi,China)
In order to dispose ground antiaircraft formation properly, an algorithm based on the maximum principle of interceptive batch to calculate anti-saturation attack capability is proposed. Firstly, the model of anti-ship missile and ground formation are constructed to obtain the relative distance of formation and missile. Then, the detection probability of ground formation is computed. Finally, the method to calculate anti-saturation attack capability is deduced in terms of the distance and detection probability. Simulation results show that the optimal formation on the basis of the algorithm has well balanced defense capabilities, with strong capability of interceptive batch and anti-saturation attack.
Anti-saturation attackInterceptive batchFormation optimisation
2016-03-24。国家安全重大基础项目(子专题)协议(613271030202,15613271030202)。杨丹丹,硕士生,主研领域:导弹制导,网络控制。方洋旺,教授。杨鹏飞,博士生。
TP274
A
10.3969/j.issn.1000-386x.2016.10.055
