基于大气反射−散射模型的复原图像中交通视频车灯检测
2016-11-08汤春明曹志升林祥清肖文娜耿磊
汤春明 曹志升 林祥清 肖文娜 耿磊,2
基于大气反射−散射模型的复原图像中交通视频车灯检测
汤春明1曹志升1林祥清1肖文娜1耿磊1,2
针对夜间复杂照明环境导致车灯检测率低的问题,提出了一种基于大气反射-散射模型的复原图像中夜间交通视频车灯检测算法.首先根据漫反射原理抑制路面漫反射光,在对大气散射模型做了改进之后,估计了大气散射模型中的大气光,再根据暗原色先验理论估计环境光,重新定义透射率,从而得到了只含有车灯及反射区域的复原图像.为了进一步抑制该复原图像中的强光光晕,再次利用暗原色先验理论重新估计环境光,得到最终的复原图像.最后对复原图像中的所有亮斑根据四类几何特征逐步筛选,排除视野中的非车灯.实验结果表明,该方法在复杂雨雪天气、高密度及高速等不同情况下,与同类先进算法相比具有较高的检测率,较低的漏检率和误检率.
车灯检测,复原图像,大气反射-散射模型,暗原色先验理论
引用格式汤春明,曹志升,林祥清,肖文娜,耿磊.基于大气反射-散射模型的复原图像中交通视频车灯检测.自动化学报,2016,42(4):605−616
根据美国国家公路交通安全管理局统计,48%的意外交通事故发生在夜间.因此夜间交通视频的智能监控算法研究越来越受到重视,以期有效降低夜间交通事故发生率,确保车辆及人身安全.由于车前灯在夜间车辆特征信息中最为可靠、稳定并且容易获取,因此目前夜间车辆检测的主流研究大多以车前灯作为主要特征,其检测的准确度直接影响到车辆的有效配对与追踪.然而,车前灯的提取受夜间环境及天气因素影响较大,特别是来自路面的强反射光干扰极难处理,导致了较高的车前灯分割错误率,成为夜间交通视频研究中的难点.
夜间交通视频智能监控中的车灯检测算法研究可分为基于几何特征的方法、基于物理模型的方法和基于机器学习的方法三大类[1].基于几何特征的车灯检测方法[2−3],如Hajimolahoseini等[2]先对灰度图像进行阈值分割,将图像感兴趣区域(Region of interest,ROI)转换到空间二维坐标系中,再通过几何形状区分车头灯与反射区域,最后设定合适的阈值逐步分离车灯.这类方法大多需要不断调整阈值,应用起来受限制较大.基于物理模型的车灯检测方法[4−6]中,如Zhang等[4]先利用光衰减模型得到车灯的路面反射抑制图,再用改进的LOG算法得到反射增强图,最后结合马尔科夫随机场检测车灯.其检测结果中有大量的车身反射光存在,路面白色车道线也很难得到有效抑制.Tang等[5]提出了基于反射光指数衰减模型的Azimuthally-blur算法,该方法使车灯与强反射区域正交,从而能够有效抑制不同天气情况下的路面反射光及车身反射光以检测到车灯.但在挡风玻璃较暗及前灯照明功率很大时,不能检测到车灯.汤春明等[6]为了克服该算法的缺点,加入了同态滤波对车灯进行检测,但是该算法对路面强反射光以及车身反射光较为敏感.基于机器学习的车灯检测方法[1,7−8]中,如Zou等[1]的算法分离线和在线两块,先通过离线训练AdaBoost分类器区分前灯与非前灯,以及场景模型,再通过在线进行实时检测、配对和追踪.这类方法因对模型进行训练,需要大量的样本,并且耗时较多,多用于对视频图像中重点关注的区域内的车灯进行处理[1−3,8−9],忽略了远处的车灯,丢失了这部分车辆的重要信息.
针对上述问题,本文提出了一种基于大气反射-散射模型的夜间交通视频车灯检测算法.实验结果表明本文方法与同类算法相比具有较高的检测率.
1 大气反射−散射模型
为了从复杂光照的环境下提取到车灯,本文在分析复杂环境光组成的基础上,构建了大气反射-散射模型.
1.1建模与分析
夜间交通,除了车前灯、尾灯等有用信息之外,还有路灯、交通信号灯以及广告牌灯的干扰,以及不同天气情况下路面的强反射光及车身的镜面反射,进入监控摄像机的光源复杂,如图1所示.其中环境光主要指路灯灯光、交通信号灯光以及广告牌、街牌装饰灯光等.大气光主要是由大气中的粒子对环境光的散射形成[10].路面漫反射是由路面材质的颜色及入射光的强度决定[10−11].
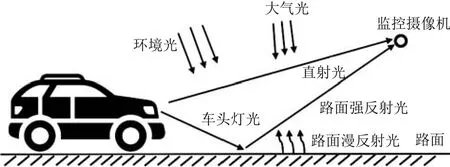
图1 光源基本组成框架示意图Fig.1 Basic composition diagram of light sources
本文按照以下规则建立大气反射-散射模型:1)夜间环境光大于大气光的影响.2)虽然大气光对光源的散射能力相对很弱,也要考虑在内.3)无论是光源还是反射区,在监控成像时随着距离的增加其照度按指数规律递减.4)光源在大气传播过程中,无可避免地受到环境光和大气光的影响,环境光增强了其照度,大气光衰减了其照度.5)晴朗夜间,路面的反射光主要是漫反射;雨天或者雪天,路面反射光主要是漫反射和镜面反射[11].
本文的大气反射-散射模型将光照的影响分为两部分.第一部分是环境光照射到路面产生的漫反射光.这部分光是造成路面整体较亮的主要原因.由于路灯、广告牌灯及街牌装饰灯的位置是固定不变的,而路面材质也不会发生变化,这样,路面漫反射光的照度就不会随着入射角的变化而变化,无论从哪个角度观察,这部分光照强度是不会发生变化的.第二部分是光源和类光源的散射光,这部分光在传播过程中,受到大气微粒的散射作用,产生了一定的衰减[4].随着景深及入射角的变化,监控摄像机最终接收到的光照度也是变化的,变化规律符合Bouguer衰减[12].
1.2漫反射抑制
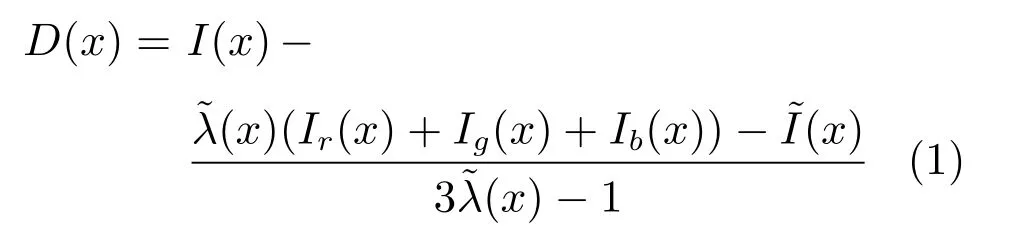
根据上述大气反射-散射模型,由环境光引起的路面漫反射光在监控摄像机成像时占了主导地位,因此首先考虑抑制路面漫反射光.漫反射分量的具体求解过程见文献[11],这里只给出最终的输入彩色图像I(x)的最大漫反射色度图D(x),如式(1):
得到漫反射抑制后的图像为

1.3大气散射模型改进
计算机视觉及计算机图形学领域广泛采用的大气散射模型[11],如式(2):

其中,t(x)=e−βd(x)为透射率(β是散射系数,d(x)是场景点x的深度值),E∞(x)是参与成像的大气光,R(x)是清晰图像,E(x)是经过漫反射抑制后图像中点x的亮度.等号右端第1项为衰减项,第2项为天空光.由本文建立的大气反射-散射模型可知,参与成像的不仅含有大气光,而且还有环境光,改进后的式(2)如式(3):

其中,E(x)是监控摄像机拍摄到的图像,R(x)是复原后的图像,A(x)是参与成像的环境光,t(x)是透射率,E∞(x)是参与成像的大气光.
2 复原图像的获取
夜间交通视频图像中,各类光源众多且相互干扰.对于晴朗的夜间,空气颗粒对光源的散射作用主要表现为单次散射[10],因此本文主要考虑点光源的单次散射.根据式(3)计算,需要对未知参量t(x),E∞(x)和A(x)进行估计:首先根据暗原色先验理论估计环境光A(x),然后根据大气反射-散射模型重新定义透射率t(x)并估计大气光E∞(x).
2.1大气光、环境光及透射率估计
暗原色先验理论是基于户外无雾图像数据库的统计规律得到的,即绝大多数的户外无雾图像的每个局部区域都存在着至少一个颜色通道强度很低的像素.该理论最初针对图像去雾,可直接估计雾的浓度并且得到高质量的去雾图像.本文基于大气反射-散射模型,应用暗原色先验理论,认为在漫反射抑制图中,每个局部区域都存在着至少一个颜色通道的强度很低的像素.夜间交通视频中各种环境光及薄雾的影响是造成视频远景中车灯难以检测的主要因素,这些影响因素可以利用去雾原理加以最大限度的抑制,从而得到复原图像.参考文献[13]中图像E的暗通道Edark定义如式(4):

其中,Ω(x)是以x为中心的邻域,Ec代表E的某个颜色通道.
环境光A(x)可以借助暗通道图估计,求解过程如下:图2(a)经式(1)处理得到图2(b),即漫反射抑制图,对其取暗通道得图2(c),对图2(c)中像素点的亮度值按从大到小顺序排列,取前0.5%最亮的像素点,对应于图2(a)中最大亮度值的矩形框标注区域,用来估计环境光A(x).

图2 车灯提取Fig.2 Headlights extraction
夜间大气光强度已经降的很低,大气光E∞(x)接近于0.
本模型中的透射指点x的反射光经过传输、衰减,最终到达监控摄像机的反射光[10].透射率为环境光占所有成像光源的比例,如式(5)所示.

其中,ω是调节系数,防止得到的复原图像远景区域变模糊.通过不同条件下大量的实验调试验证,当ω取0.95时,得到的复原图像最理想.透射率成像结果如图2(d)所示,图中有明显的块状效应,用导向滤波器平滑处理得到图2(e),保留了边缘信息,消除了块状效应.
2.2复原图像
有了大气光E∞(x)、环境光A(x)以及透射率t(x)之后,由式(3)可以得到复原后的图像R(x)如式(6)所示:

其中,t0为防止分母为零而设,本文取0.01.
复原图像获取步骤:原图像先通过漫反射抑制处理,消除由环境光造成的路面漫反射光的影响,在漫反射抑制图中遍历取15×15的暗通道估计环境光A(x),由式(5)计算得到透射率t(x),再经过导向滤波平滑处理后,由式(6)得到了复原图R(x)(图2(f)),为了抑制R(x)图中产生的强光光晕,利用式(4),对R(x)遍历取15×15的暗通道,重新估计环境光A(x),并假定同一场景中的透射率t(x)不变,用式(6)去掉光晕,得到最终的复原图R'(x)如图2(g)所示.复原图流程如图3所示.

图3 本文车灯检测算法流程Fig.3 Flow chart of headlights extraction algorithm
3 车灯筛选
复原图R'(x)中不仅存在车头灯和路面强反射区,还有车身反射光.为了筛选车头灯,需要结合几何特征进一步去除干扰亮斑.根据所拍摄的视频,车头灯的形状大致分为以下四类:
1)圆形车灯,如图4(a).这类车灯最为普遍,较易区分,面积一般在70个像素左右,长宽比接近于1,周长在20个像素左右,大于每一帧视频中亮斑的平均周长,圆度M近似为1.
2)椭圆形车灯,如图4(b).椭圆形车灯出现在视野的近景处,面积一般在90个像素左右,长宽比一般在1.17或者0.85左右,本文取值范围设定在0.8~1.2之间,周长在30个像素左右,大于每一帧视频中亮斑的平均周长,圆度M 在0.8左右.
3)近似圆形车灯,如图4(c).这类车灯出现在视野的远景处,车灯功率较大,本文模型能够保留其亮度最大的中心区域,面积一般在120个像素左右,长宽比近似为1,周长在80个像素以上,大于每一帧视频中亮斑的平均周长,圆度在0.9左右,近似为1.
4)方形车灯,如图4(d).这类车灯来自Zhang等[4]所给视频,面积值小于200个像素,长宽比达到了极限值1.2,周长在70个像素左右,大于每一帧视频中亮斑的平均周长,圆度值在0.7左右.
针对上述四类车灯的几何特征,对每帧图像的所有亮斑进行筛选:
首先根据面积大小和长宽比例,去除面积较大且形状不规则的反射光区域.将面积小于阈值Th的亮斑保留,这里Th取300个像素.一般车灯近似圆形,这里取长宽比的范围在(0.8,1.2).
然后根据亮斑周长去除明显小亮斑.去除大面积反射区域以后,取每一帧视频中亮斑周长P的平均值Pmean,如果P<0.5Pmean,这类亮斑将被抑制掉.
最后根据亮斑圆度M作进一步细化处理.由于车头灯的M 大多近似为1,通过式(7)定义圆度偏心率temp,如果|1−M|<temp,说明亮斑近似圆形,将被保留.
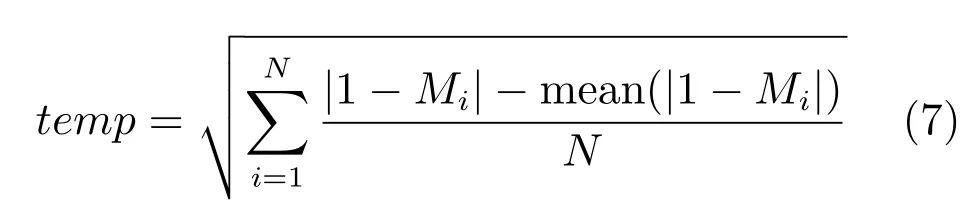
其中,N是当前图像中总车灯数,mean(|1−Mi|)表示取|1−Mi|的均值.车头灯筛选结果如图2(h)所示.
4 车灯检测结果及对比分析
本文共测试了9段视频序列,包括高密度、雪后、雨后和高速四种特殊情况,序列1~9的视频分别为:1244,1187,812,915,2049,6615,1152,4993,1852帧.所用视频均由索尼HDR-550d摄像机在夜模式下拍摄,相机架设于天津市过街天桥上,拍摄角度与水平方向呈45~60度,帧率为25帧每秒,每帧图像大小为240像素×320像素.本文采用Jaccard系数[14]评估算法性能,其中检测率E=TP/(FP+TP+FN),误检率FPR=FP/(FP+ TP+FN),漏检率FNR=FN/(FP+TP+FN),这里TP表示正确检测数,FP表示错误检测数,FN表示漏检数.
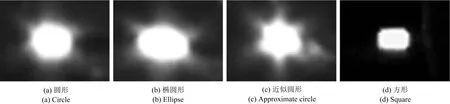
图4 车灯形状分类Fig.4 Headlight shapes classification
由于文献[1]需要大量统计数据训练模型,因此本文车灯检测结果没有与文献[1]的结果做对比.图5是文献[4]中的彩色视频(第1行)及所提供检测结果(第2行)与本文算法的检测结果(第3行)的对比,图5(a)是第1帧,图5(b)~5(d)分别是间隔50帧截取的视频图像.其中,图5(a)是对细条状的车道线干扰的处理结果,图5(b)是对车身反射光干扰的处理结果,图5(c)和图5(d)是对车身轮廓线及路面长条状强反射区域干扰的处理结果.通过图中矩形框标记部分的处理结果对比看出,本文算法对车身反射光以及路面长条状强反射光抑制能力更强.由于文献[4]中只有这一段彩色视频能够较好地应用暗原色先验理论估计环境光,因此本文只与这段视频的检测结果进行了对比.表1是两种算法用于车灯检测的数据统计结果.可以看出,本文算法的车灯检测率较高,误检数要比文献[4]低.
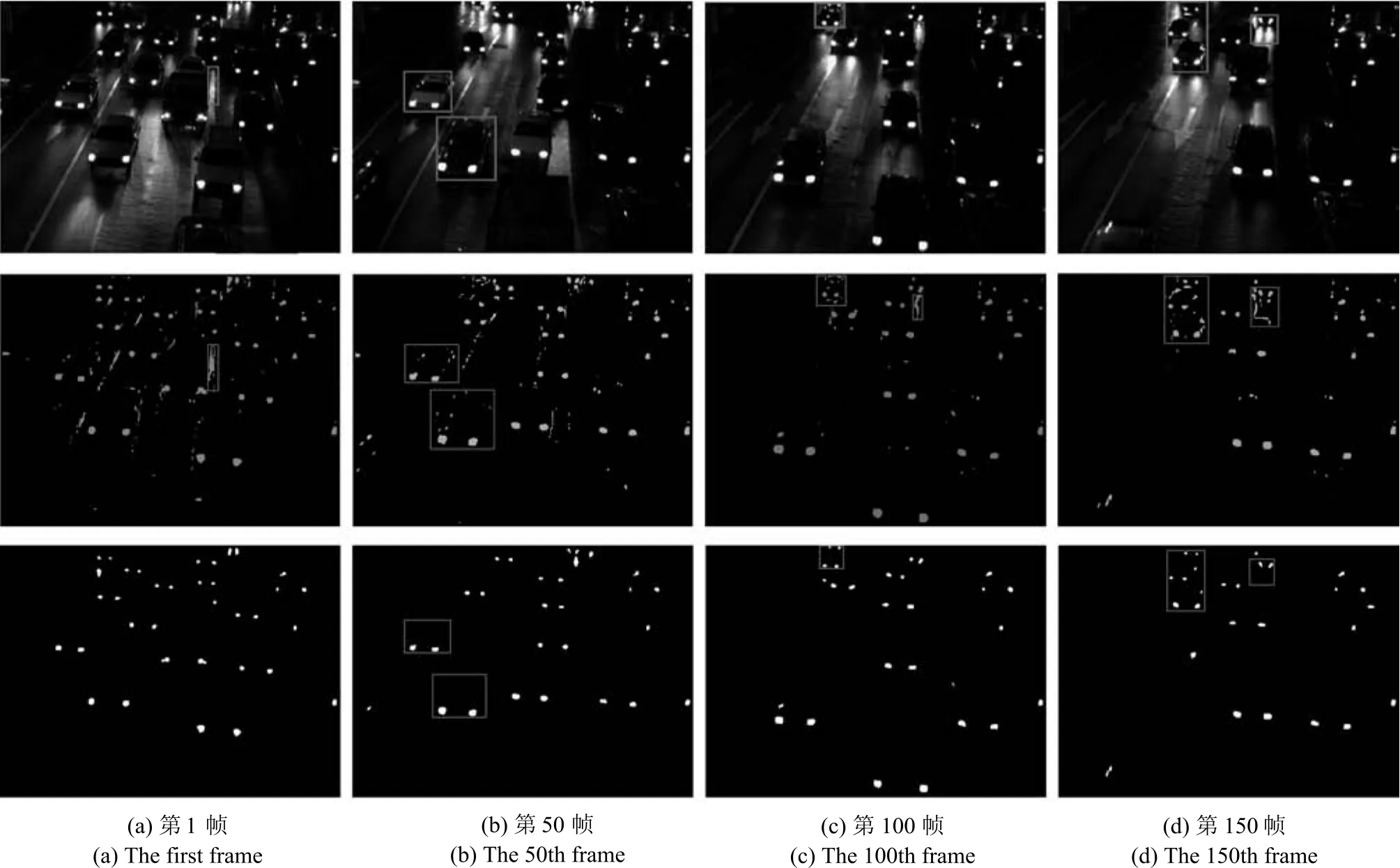
图5 文献[4]检测结果与本文检测结果对比Fig.5 Comparison of headlights extraction by our and Zhang et al.[4]algorithms
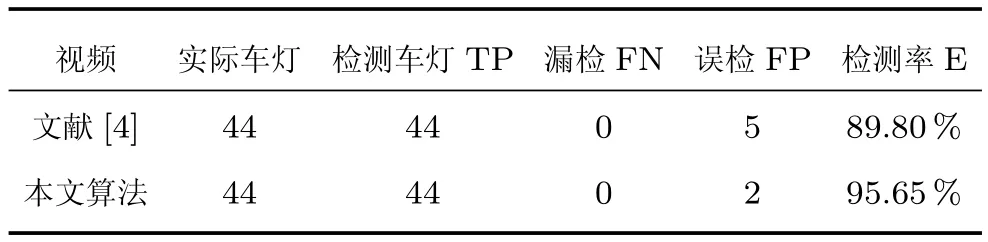
表1 检测结果与本文检测结果对比Table 1 Comparative results of headlights detection by our and Zhang et al.[4]algorithm
图6和图7是在车灯检测结果未做膨胀运算、静止路灯未被抑制的条件下,本文算法与文献[5]算法在几种特殊情况下车灯检测结果的对比图.图6是在同一视频中的车灯检测结果对比,第1行为原视频图像,第2行为文献[5]算法的检测结果,第3行为本文算法的检测结果.由于本文大气反射-散射模型能够有效抑制各类环境光及薄雾霾对车灯检测的影响,在复原图像中得到亮度值最大的区域,而车灯的亮度值最大且最稳定,因此在图6(a)中,当车身整体较暗时(如右下方车辆),本文算法明显优于文献[5]算法.图6(b)~6(d)中,当车灯功率比较大、车身整体较暗以及前挡风玻璃比较暗时,本文算法不受邻域像素点亮度值的影响,其检测结果比文献[5]有很大的提高,能够克服其算法的不足.
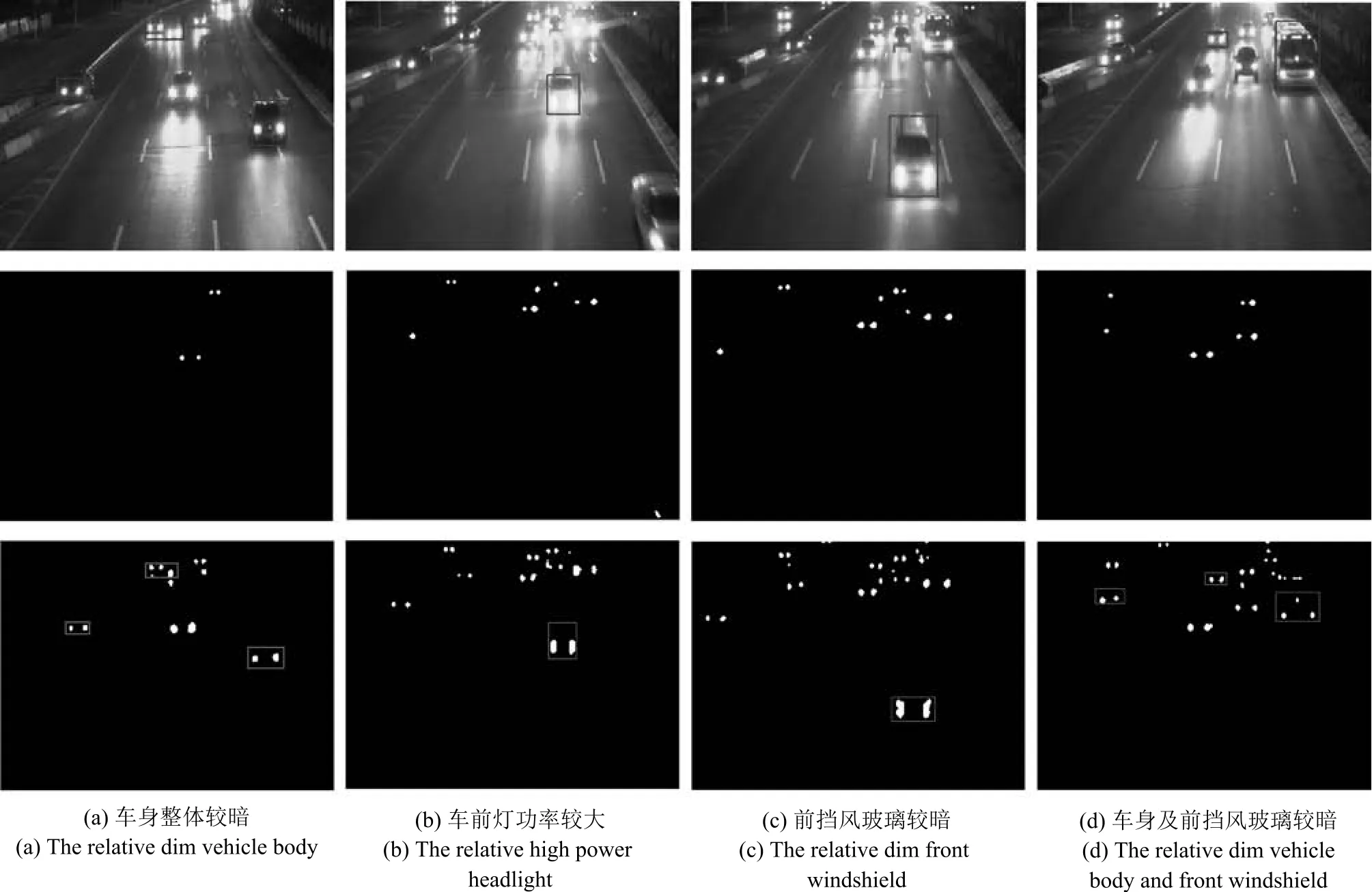
图6 相同条件下,同一视频特殊情况检测结果对比Fig.6 Comparison of some special cases in the same video and conditions
图7是不同视频上述几种特殊情况下的车灯检测结果对比,第1行为原视频图像,第2行为文献[5]车灯检测结果,第3行为本文检测结果.图7(a)~7(c)是车灯功率较大、车身整体较暗的情况,图7(d)是存在单车灯照明功率很大及车身整体较暗的情况.由图中矩形框标记部分的处理结果对比可以看出,大气反射-散射模型表现出很好的检测性能.
图8~11例举了高密度(1244帧)、雪后(915帧)、雨后(2049帧)、高速(1152帧)四种特殊视频图像的检测结果,并与文献[5]检测结果对比.图8~11各图中的子图(a)是第1帧,子图(b)~(d)是视频序列中取相同帧间隔截取的图像,根据视频长短,4段视频序列的间隔帧数分别为150,50,300,100.图8~11的第1行均为原视频帧图像,第2行为文献[5]的检测结果,第3行为本文的检测结果.基于本文模型,不仅能够稳定检测近景处的车灯并保持其几何特征不变,而且对于远景处的车灯能够准确定位,较文献[1−3,8−9]方法检测效果更好.如在图8高密度车流情况下,尽管有些车灯功率较大以及车身整体较暗,本文算法依然能够稳定检测车灯;在图9的雪后情况,漫反射抑制算法有效抑制了冰雪路面对车灯的强反射光;在图10的雨后情况,除有效抑制积水路面的强反射光之外,还利用暗原色先验理论抑制了雨后空气中的水雾;在图11的高速情况(右侧车道)下,车辆在快速行进的过程中,虽然车灯信息较为稳定,但是路面强反射区域快速变化,对车灯检测造成强烈的干扰,本文算法对这种情况也有较好的检测效果.
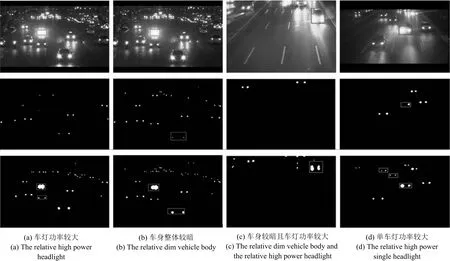
图7 相同条件下,不同视频特殊情况检测结果对比Fig.7 Comparison of special cases in different videos and same conditions
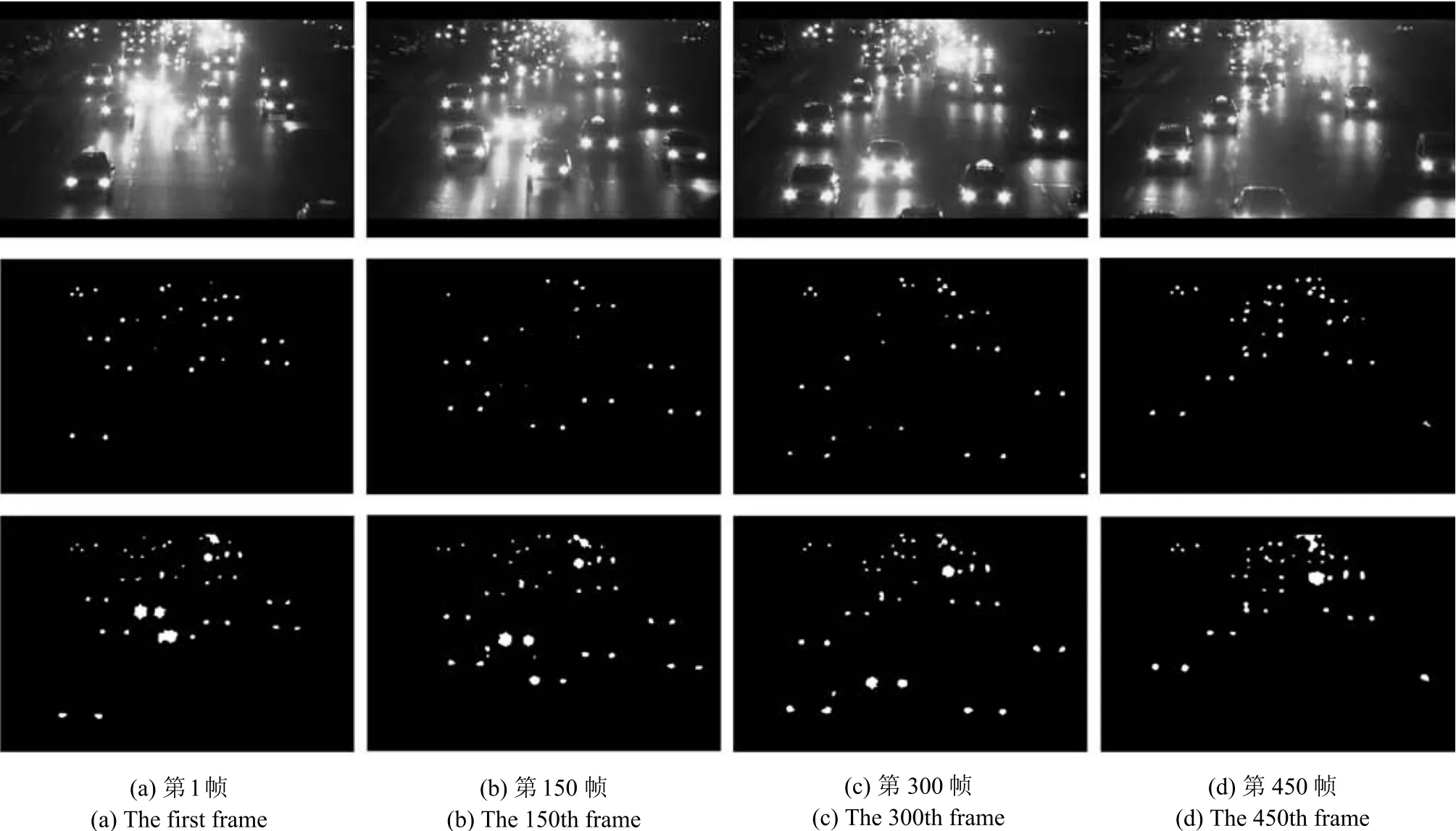
图8 高密度情况下,文献[5]检测结果与本文检测结果对比Fig.8 Comparison of headlight extraction by our algorithm and Azimuthally-blur technique[5]in high intensity
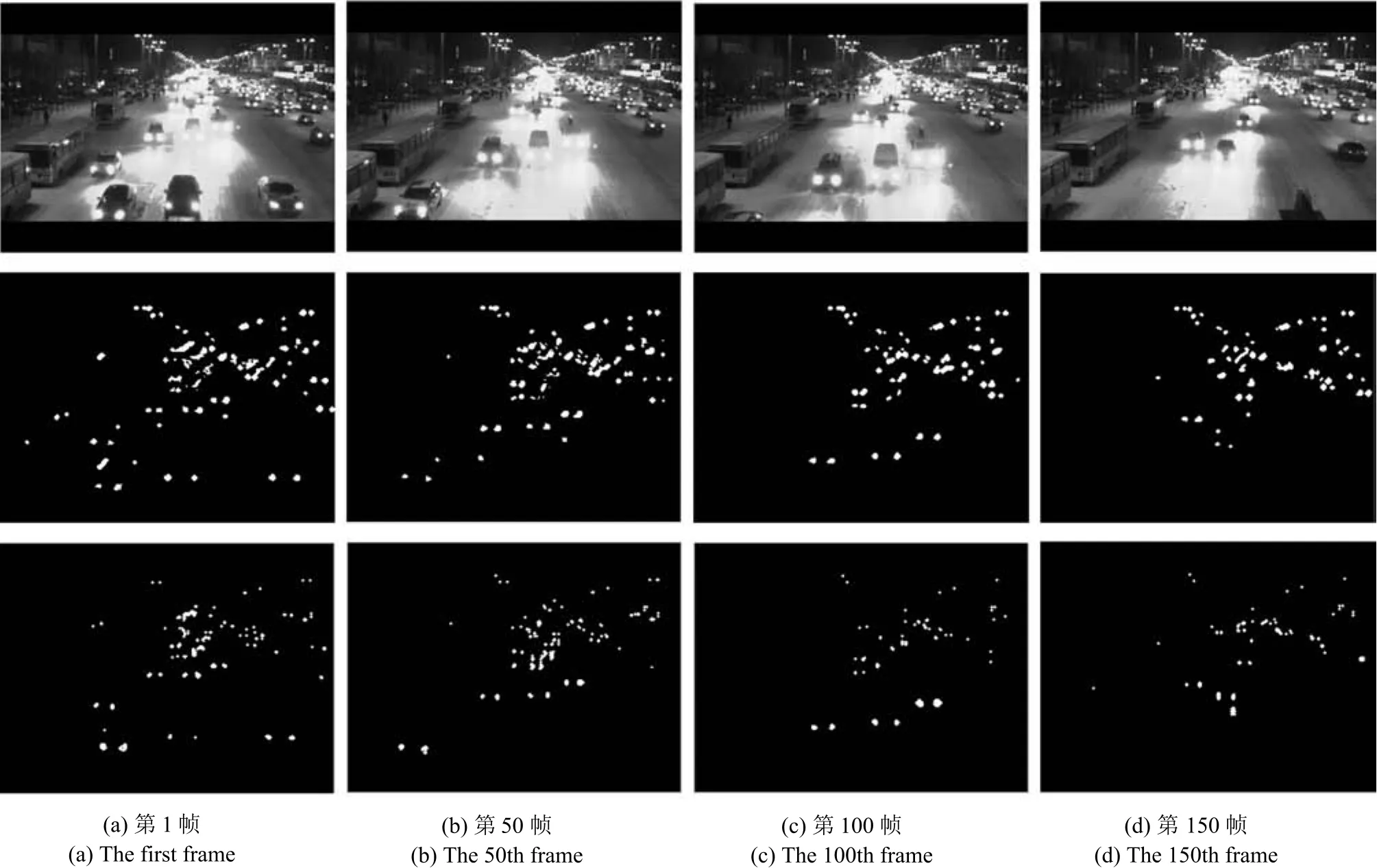
图9 雪后情况下,文献[5]检测结果与本文检测结果对比Fig.9 Comparison of headlight extraction by our algorithm and Azimuthally-blur technique[5]after snow
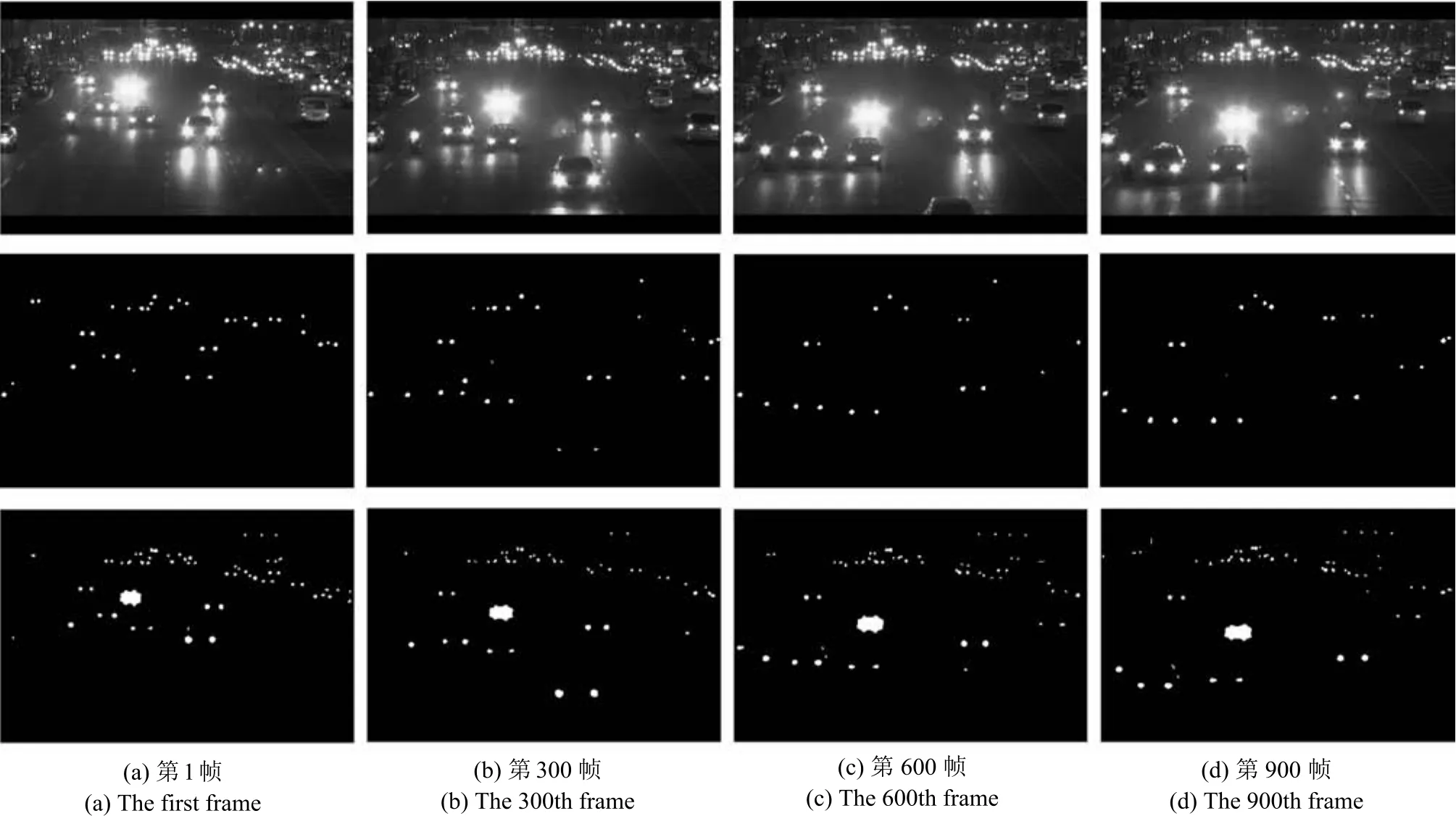
图10 雨后情况下,文献[5]检测结果与本文检测结果对比Fig.10 Comparison of headlight extraction by our algorithm and Azimuthally-blur technique[5]after rain
表2是图8~11中本文方法与文献[5]方法在四种情况下车灯检测结果的数据统计结果.高密度情况下,最高检测率达95.65%,比文献[5]最高检测率高出9.29%.雨后情况下,最高检测率可达100%,由于存在前灯照明功率较大、车身整体较暗的情况,导致文献[5]的检测率相对较低.复杂高速情况下,本文检测率仍然高于文献[5],平均高出5.44%.雪后情况下,路面反射主要是镜面反射和漫反射[11],其反射光强度明显高于其他路面情况,致使远处车灯与路面强反射光连成一片,极难区分,因此这种情况下的检测率较低.
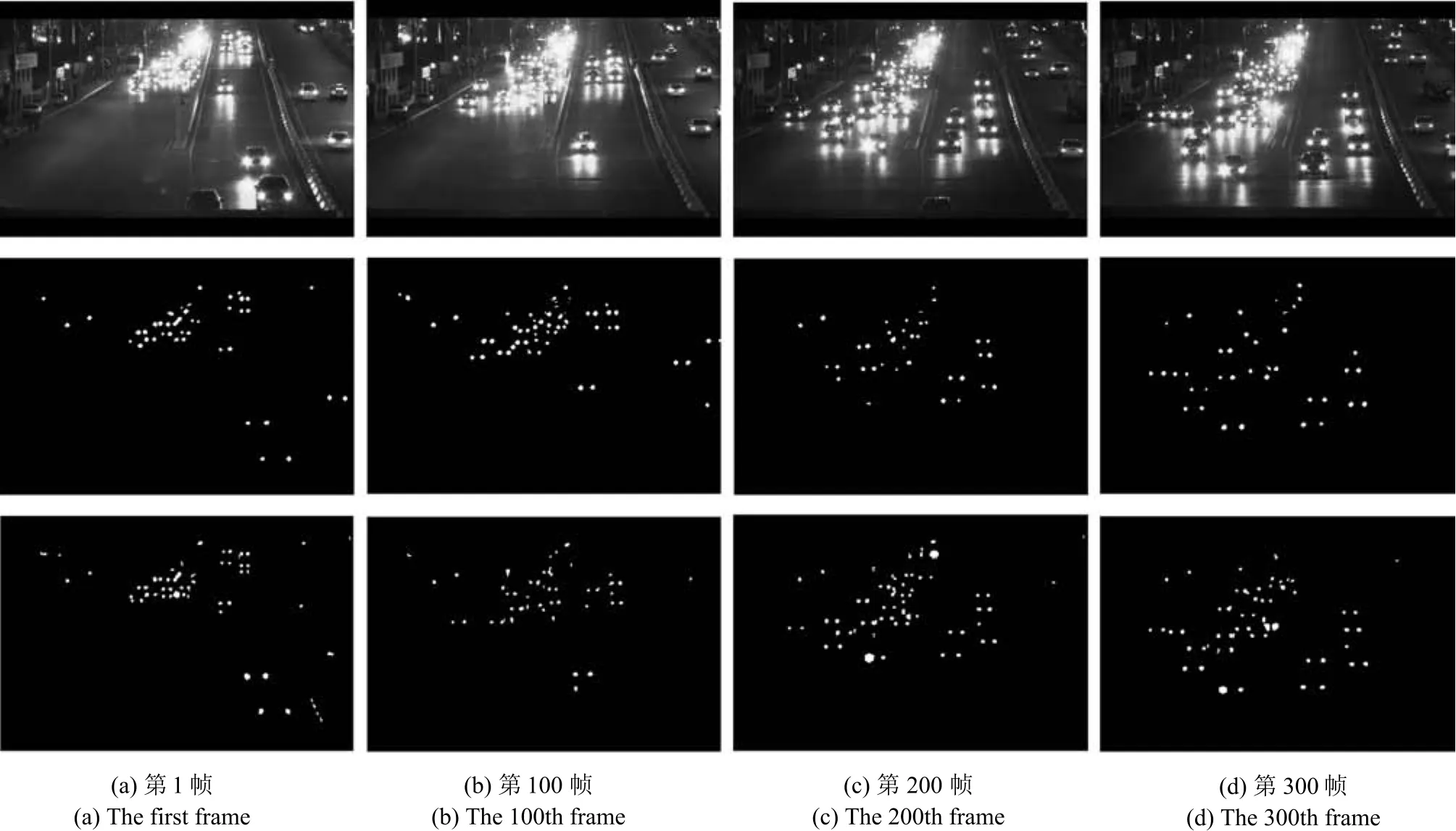
图11 高速情况下,文献[5]检测结果与本文检测结果对比Fig.11 Comparison of headlight extraction by our algorithm and Azimuthally-blur technique[5]in high speed
应用本文算法对9段视频序列中共449辆车进行检测的数据统计及与文献[5]的对比结果如表3所示.可以看出,本文算法最高检测率达94.87%,比文献[5]的结果高出1.47%,最高漏检率低1.37%,最高误检率低4.2%.
图12是在本文车灯检测结果的基础上,应用作者之前开发系统[6]的配对与追踪算法得到的效果示意图,用最小匹配代价算法对每一帧内所有车灯配对,根据配对情况提取车辆轨迹实现追踪,并引入反馈修正机制对车辆轨迹进行修正,达到系统实现夜间车辆自动识别、追踪的最终目的.

图12 车灯配对及车辆轨迹Fig.12 Headlights pairing and vehicles tracking
5 结论与展望
本文基于大气反射-散射模型的车灯检测方法,根据漫反射原理抑制路面的漫反射光,应用暗原色先验理论估计环境光和透射率,得到只含有车灯与路面强反射光的复原图像,对复原图像再利用暗原色先验理论重新估计环境光,进一步抑制其中的强光光晕,最后根据车灯的几何特征筛选出复原图像中的车灯,有效检测车灯.验证实验结果表明,本文算法能够适应多种复杂光照下的车灯检测,能够用于挡风玻璃较暗且前灯照明功率过大这类特殊情况下的车灯提取,能够有效降低路面强反射光区域以及车身镜面反射对车灯检测造成的影响.与文献[4]相比,检测率提高了5.85%,与文献[5]相比,平均检测率提高了2.70%,平均误检率降低了2.16%,平均漏检率降低了0.26%,尤其在高密度情况下,比文献[5]的最高检测率高出7.80%.本文算法在车灯筛选时有较多的阈值限制,未来的工作将会对车灯特征做进一步的分析、分类,用于车灯筛选.
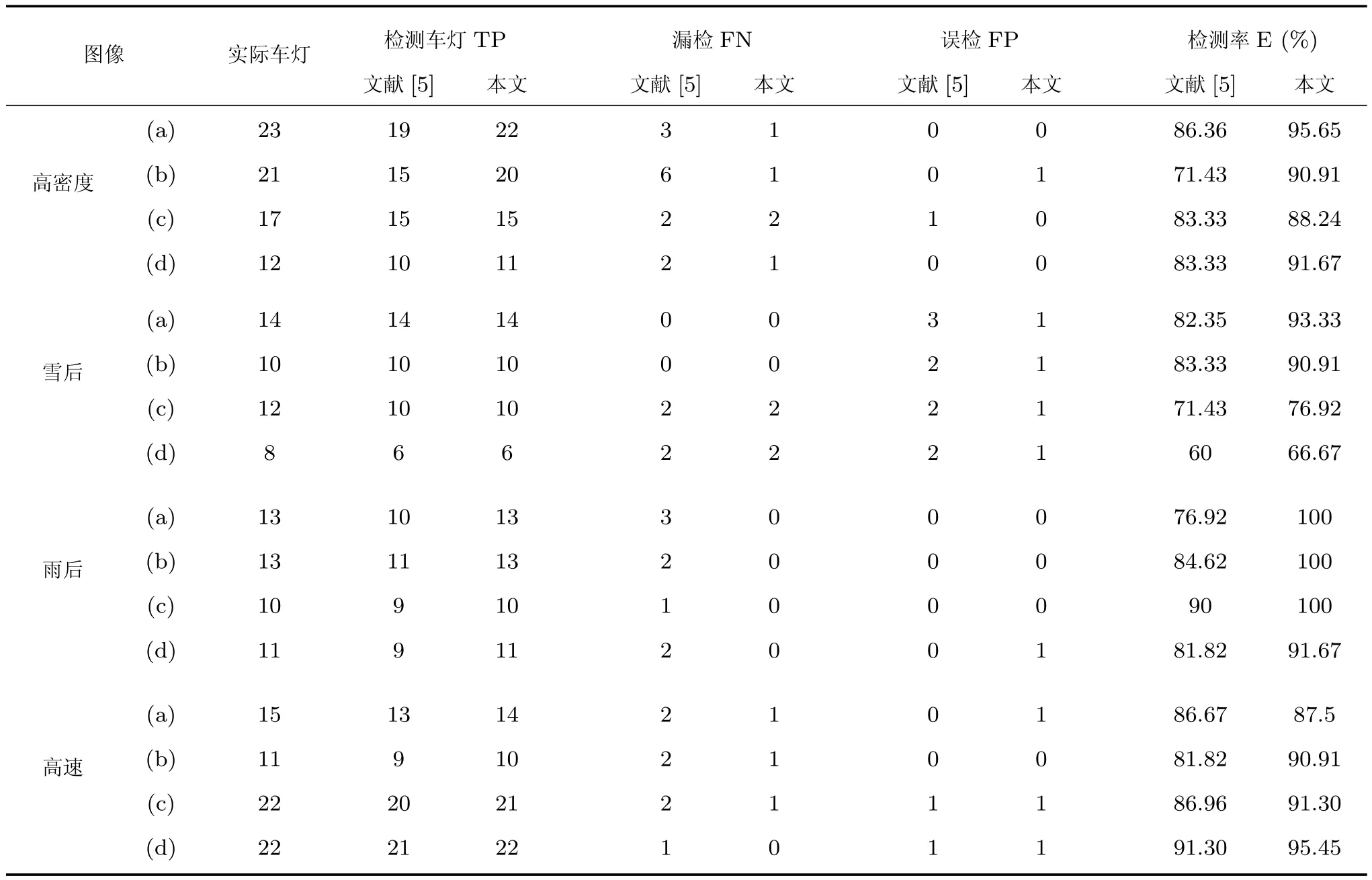
表2 四种特殊情况下车灯检测结果Table 2 Headlight detection under four special cases
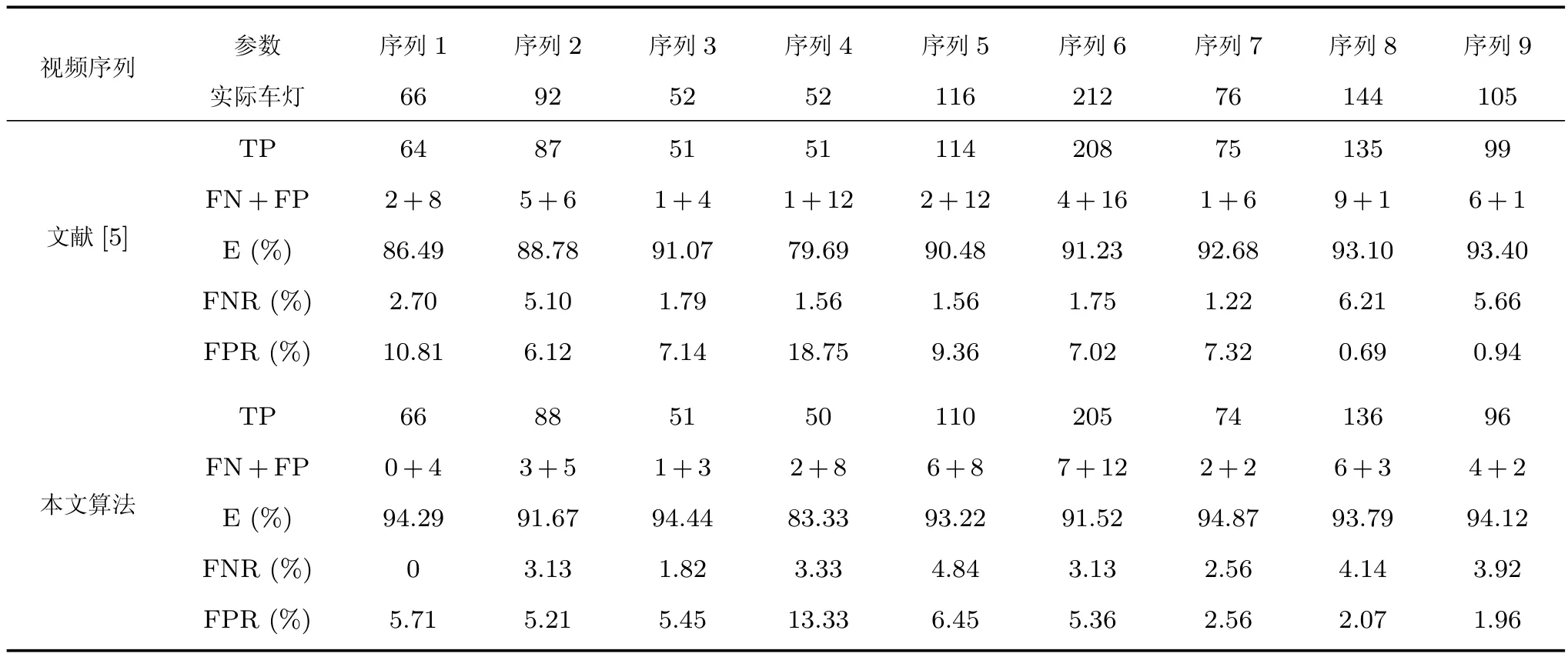
表3 车灯检测结果Table 3 Headlight detection results
致谢
感谢Zhang教授[4]提供的视频及车灯检测结果.
References
1 Zou Q,Ling H B,Luo S W,Huang Y P,Mei T.Robust nighttime vehicle detection by tracking and grouping headlights. IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2838−2849
2 Hajimolahoseini H,Soltanian-Zadeh H,Amirfattahi R.Robust vehicle tracking algorithm for nighttime videos captured by fixed cameras in highly reflective environments. IET Computer Vision,2014,8(6):535−544
3 Chen Y L,Wu B F,Huang H Y,Fan C J.A real-time vision system for nighttime vehicle detection and traffic surveillance.IEEE Transactions on Industrial Electronics,2011,58(5):2030−2044
4 Zhang W,Wu Q M J,Wang G H,You X G.Tracking and pairing vehicle headlight in night scenes.IEEE Transactions on Intelligent Transportation Systems,2012,13(1):140−153
5 Tang C M,Hussain A.Robust vehicle surveillance in night traffic videos using an Azimuthally blur technique.IEEE Transactions on Vehicular Technology,2015,64(10):4432−4440
6 Tang Chun-Ming,Nie Mei-Ling,Ding Teng-Fei,Hao Huan-Fei,Han Xu.Nighttime vehicle detection and tracking based on minimum feature matching cost.Computer Applications and Software,2015,32(4):292−296(汤春明,聂美玲,丁腾飞,浩欢飞,韩旭.基于最小特征匹配代价的夜间车辆检测和追踪.计算机应用与软件,2015,32(4):292−296)
7 Rubio J C,Serrat J,Lopez A M,Ponsa D.Multiple-target tracking for intelligent headlights control.IEEE Transactions on Intelligent Transportation Systems,2012,13(2): 594−605
8 Jazayeri A,Cai H Y,Zheng J Y,Tuceryan M.Vehicle detection and tracking in car video based on motion model. IEEE Transactions on Intelligent Transportation Systems,2011,12(2):583−595
9 O'Malley R,Jones E,Glavin M.Rear-lamp vehicle detection and tracking in low-exposure color video for night conditions.IEEE Transactions on Intelligent Transportation Systems,2010,11(2):453−462
10 Qi Bao-Jun.The Application of Atmospheric Scattering Model in Image Contrast Enhancement and Surface of the Small Target Detection[Ph.D.dissertation],National University of Defense Technology,China,2013.(齐保军.大气散射模型在雾天图像增强和海面小目标检测中的应用[博士学位论文],国防科学技术大学,中国,2013.)
11 Tan R T,Ikeuchi K.Separating reflection components of textured surfaces using a single image.IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(2): 178−193
12 Bouguer P.Trait´e d'Optique Sur La Gradation De La Lumi`ere,1729.93−115
13 He K M,Sun J,Tang X O.Single image haze removal using dark channel prior.IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(12):2341−2353
14 Sneath P H A.Numerical Taxonomy:The Principles and Practice of Numerical Classification.New York,USA:W H Freeman Co,1973.53−85
15 Kosaka N,Ohashi G.Vision-based nighttime vehicle detection using CenSurE and SVM.IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2599−2608
16 Wu Di,Zhu Qing-Song.The latest research progress of image dehazing.Acta Automatica Sinica,2015,41(2):221−239(吴迪,朱青松.图像去雾的最新研究进展.自动化学报,2015,41(2):221−239)
17 Liu Hai-Bo,Yang Jie,Wu Zheng-Ping,Zhang Qing-Nian,Deng Yong.A fast single image dehazing method based on dark channel prior and Retinex theory.Acta Automatica Sinica,2015,41(7):1264−1273(刘海波,杨杰,吴正平,张庆年,邓勇.基于暗通道先验和Retinex理论的快速单幅图像去雾方法.自动化学报,2015,41(7):1264−1273)

汤春明天津工业大学电子与信息工程学院教授.2006年获哈尔滨工程大学信息与通信工程学院博士学位.2009年于哈尔滨工业大学计算机科学与技术学院博士后流动站出站.主要研究方向为视频中多目标识别与追踪,图像处理与模式识别,数据处理与信息挖掘,材料无损检测技术与系统.本文通信作者.E-mail:tangchunminga@hotmail.com
(TANG Chun-MingProfessor at the School of Electronics and Information Engineering,Tianjin Polytechnic University.She received her Ph.D.degree from the School of Information and Communication Engineering,Harbin Engineering University in 2006.She has been out of the postdoctoral research station of Harbin Institute of Technology in 2009.Her research interest covers multi-objects identification and tracking in video,image processing andpattern recognition,data processing and information mining,techniques and system of material's nondestructive testing.Corresponding author of this paper.)

曹志升天津工业大学电子与信息工程学院硕士研究生.2013年获得天津工业大学电子与信息工程学院电子信息工程学士学位.主要研究方向为图像处理与模式识别,视频中目标识别与追踪.E-mail:zhishengcao1999@163.com
(CAO Zhi-ShengMaster student at the College of Electronic and Information Engineering,Tianjin Polytechnic University.He received his bachelor degree from Tianjin Polytechnic University in 2013.His research interest covers image processing and pattern recognition,objects identification and tracking in video.)

林祥清天津工业大学电子与信息工程学院硕士研究生.2014年获得天津工业大学电子与信息工程学院电子信息科学与技术学士学位.主要研究方向为图像处理,目标识别与追踪.E-mail:lxiangqing0311@163.com
(LIN Xiang-QingMaster student at the School of Electronic and Information Engineering,Tianjin Polytechnic University.He received his bachelor degree from Tianjin Polytechnic University in 2014.His research interest covers image and processing,objective recognition and tracking.)

肖文娜天津工业大学电子与信息工程学院硕士研究生.2014年获得大连民族大学信息与通信工程学院电子信息工程学士学位.主要研究方向为目标识别与追踪.E-mail:xwna829@sina.cn
(XIAO Wen-NaMaster student at the School of Electronic and Information Engineering,Tianjin Polytechnic University.She received her bachelor degree from Dalian Nationality University in 2014.Her research interest covers objects'recognition and tracking.)

耿 磊天津工业大学电子与信息工程学院副教授.2012年获天津大学博士学位.主要研究方向为机器视觉,图像处理.E-mail:genglei@tjpu.edu.cn
(GENG LeiAssociate professor at the School of Electronic and Information Engineering,Tianjin Polytechnic University.He received his Ph.D.degree from Tianjin University in 2012.His research interest covers computer vision and image processing.)
Headlights Detection in Traffic Videos Based on Atmospheric Reflection-scattering Model via Reconstructing Restoration Images
TANG Chun-Ming1CAO Zhi-Sheng1LIN Xiang-Qing1XIAO Wen-Na1GENG Lei1,2
As the detection rate of headlights under complex lighting scenes in nighttime is relatively low,a novel algorithm of headlights detection based on atmospheric reflection-scattering model has been presented.The diffuse reflection light from road surface is firstly suppressed using the diffuse reflection principle.After improving the atmosphere scattering model,the airglow is estimated.The ambient light is then estimated with the dark-channel prior theory and the transmittance is defined again.A restoration image is obtained in which only headlights and reflection regions are contained. In order to suppress the halo produced by the highlights in the restoration image,the ambient light is estimated again with the dark-channel prior theory.All spots are then checked according to their four types of geometric characteristics step by step,non-headlights are finally filtered out.Experimental results show that under complicated weather,such as rain or snow,or under high population,or high-speed,the proposed algorithm has a higher detection rate,lower miss rate and false detection rate,compared with other similar advanced algorithms.
Headlights detection,restoration images,atmospheric reflection-scattering model,dark-channel prior theory
Manuscript July 28,2015;accepted October 19,2015
10.16383/j.aas.2016.c150485
Tang Chun-Ming,Cao Zhi-Sheng,Lin Xiang-Qing,Xiao Wen-Na,Geng Lei.Headlights detection in traffic videos based on atmospheric reflection-scattering model via reconstructing restoration images.Acta Automatica Sinica,2016,42(4):605−616
2015-07-28录用日期2015-10-19
天津市第三批三年千人计划项目(62014511),天津市科技支撑计划重点项目(14ZCZDGX00033),天津工业大学引进教师科研启动项目(03 0367)资助
Supported by the Third Thousand Talents Plan of Tianjin over Three Years(62014511),Science and Technology Supporting Key Project of Tianjin(14ZCZDGX00033),and Scientific Research Starting Project for Introduce Teachers of Tianjin Polytechnic University(030367)
本文责任编委侯忠生
Recommended by Associate Editor HOU Zhong-Sheng
1.天津工业大学电子与信息工程学院 天津3003872.天津工业大学智能信息处理技术与系统实验室天津300387
1.School of Electronic and Information Engineering,Tianjin Polytechnic University,Tianjin 3003872.Intelligent Information Processing Technology and Systems Laboratory,Tianjin Polytechnic University,Tianjin 300387
