基于改进BP神经网络的S700K转辙机控制电路故障诊断研究*
2016-11-03成利刚
成利刚
(五邑大学轨道交通学院,广东 江门 529000)
基于改进BP神经网络的S700K转辙机控制电路故障诊断研究*
成利刚
(五邑大学轨道交通学院,广东 江门 529000)
针对S700K型转辙机控制电路故障定位和检测精度不高,故障延时长的现状,通过分析于S700K转辙机启动电路和表示电路的故障的特点,建立了基于改进BP神经网络的故障诊断模型,有效的解决了网络容易陷入局部最小值和收敛速度慢的缺点。通过测试,表明了该方法的有效和准确判断S700K转辙机控制电路的故障位置,效果良好,能够满足轨道交通现场的实际需求。
BP神经网络;S700K型转辙机;控制电路;故障诊断
近年来,轨道交通发展迅猛,作为保证列车安全高效运行的信号系统面临着严峻的挑战。S700K型转辙机广泛的应用于轨道交通的道岔控制,当其发生故障,则列车将无法按照预定径路安全的在线路上运行,轻则造成列车晚点,重则导致列车发生倾覆、掉道等安全事故。当道岔控制系统发生故障时,如何准确定位故障位置和类型,对于及时的排除故障,减少故障延时,保证列车运行安全,提高轨道交通的运输效率意义重大。对于S700K型转辙机控制电路的故障诊断仍旧停留在依靠工作人员的个人工作经验和简单仪表进行检测的阶段,处理故障困难,故障延时较长。
AtamuradovV等人基于动态时间规划模型建立了道岔故障诊断专家系统,检测道岔故障[1];RobertsC等人通过检测道岔的转速、压力等相关参数,建立了多项式模型函数实现故障诊断[2]。翟永强等人通过建立贝叶斯网络,实现对道岔启动及表示电路的故障诊断[3]。赵林海等人基于道岔转辙机典型故障下的动作功率曲线变化规律,提出一种基于灰关联的道岔故障诊断方法[4]。
1 BP神经网络的算法及改进
1.1BP神经网络的算法
BP(BackPropagation)神经网络是一种多层前馈神经网络。其由输入层、若干隐含层和输出层组成,如图1所示,为典型的三层BP神经网络拓扑结构。BP网络的学习过程由信息的正向传播和误差的反向传播两个过程组。输入层各神经元负责接收来自外界的输入信息,并传递给中间层各神经元;中间层负责信息变换,输出层向外界输出信息处理结果。当实际输出与期望输出不符时,进入误差的反向传播阶段,不断调整权值和阈值,直到网络输出的误差减少到可以接受的程度,或者预先设定的学习次数为止[5]。
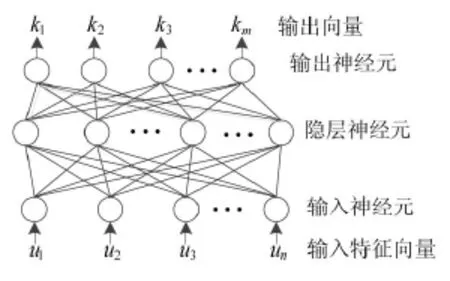
图1 BP神经网络结构示意图
BP神经网络中,第k层j个神经元的输入输出关系可表达为:

其中,wij(k-1)为第k-1层中第i个神经元与第k层j个神经元的连接强度;bj(k)为对应神经元阈值;fj(k)第k层j个神经元的传递函数,BP神经网络,是取各神经元的传递函数为:

1.2BP神经网络的改进
BP神经网络算法在迭代计算的过程中,采用梯度下降法,容易使权值陷入局部极小值。而且由于学习速率是固定的,因此网络的收敛速度慢,需要较长的训练时间。为了解决这些问题,对其进行改进。
1)采用附加动量法来解决局部极小值问题。在本次误差计算所得的权值调整量上加上前一次权值调整量的一部分,即:

其中,wij(k-1)(t)为当前权;wij(k)(t+1)为修正后的权;δhj(k)为误差传递项;α为动量因子;η为学习速率
2)采用自适应的学习速率,根据误差变化而自动的调节学习速率,从而增加算法的稳定性,提高其收敛速度。自适应的学习速率为:

其中,e(t)为第t步的误差。
2 S700K型转辙机控制电路分析
S700K型转辙机控制电路,如图2所示,主要包含RD1、RD2、RD3、RD4熔断器,BD表示变压器,1DQJ、BHJ、2DQJ、1DQJF、DBQ、TJ、DBJ、FBJ 继 电器。采用五线制控制,每线电阻应小于54Ω,X1、X2、X5为定位启动线;X1、X3、X4为反位启动线;X1、X2、X4为定位表示线;X1、X3、X5为反位表示线[5,6]。

图2 S700K型转辙机控制电路
S700K型转辙机控制电路故障,一般分为启动电路故障和表示电路故障:
1)启动电路故障:
a.1DQJ励磁或自闭电路故障;
b.2DQJ电路故障;
2)表示电路故障
a.定位表示电路故障;
b.反位表示电路故障。
2.1启动电路分析
启动电路主要是为了接通或断开转辙机电机电路,控制转辙机动作的电路,主要包括1DQJ励磁与自闭电路,2DQJ转极电路,单独操纵道岔,定位向反位转换时的控制电路动作过程:
1)1DQJ励 磁 吸 气 ;KZ→CA61-62→SJ81-82→1DQJ3-4→2DQJ141-142→AJ11-12→KF-ZFJ;
2)1DQJF励磁吸气;KZ→1DQJF1-2→TJ33-31→1DQJ31-32→KF;
3)2DQJF转极;KZ→1DQJF41-42→1DQJ1-2→AJ11-12→KF-ZFJ;
电动机得电过程如图3所示。

图3 反位起动电路简化图
反位启动电路故障电气特性参考值,如表1所示,S700K型转辙机启动电路典型故障主要有:(1)A1为1DQJF21-22接点接触不良;(2)A2为X3室内断线;(3)A3为X3室外断线;(4)A4为1DQJF11-12接点接触不良;(5)A5为X4室内断线;(6)A6为X4室外断线;(7)A7为1DQJ11-12接点接触不良;(8)A8为X1室内断线;(9)A9为X1室外断线;(10)A10为X2室内断线;(11)A11为X2室外断线;(12)A12为X5室内断线;(13)A13为X5室外断线。
B3为 1DQJF11—1DQJF21间交流电压;B2为1DQJ11—1DQJF21间交流电压;B1为1DQJ11—1DQJF11间交流电压;B4为X1、X3间交流电压;B5为X1、X4间交流电压;B6为X3、X4间交流电压。

表1 反位启动电路故障电气特性参考值
2.2表示电路典型故障分析
表示电路是指将道岔所处的位置和状态通过电路传递到信号楼并显示,包括定位表示电路和反位表示电路,在此,仅以反位表示电路进行分析,其反位表示电路简化图如图4所示:

图4 反位表示电路简化图
DJZ220→熔断器RD4→表示变压器→R1→1DQJ23-21→2DQJ131-133→1DQJF23-21→2DQJ121-123→分线盘X3→21-22接点→45-46接点→电阻R→二极管Z→24-23接点→电机线圈→分线盘X1→1DQJ11-13→表示变压器→DJF220。
二极管与FBJ的接通公式为:
FBJ线圈端子1→1DQJF23-21→2DQJ121-123→分线盘X3→21-22接点→45-46接点→电阻R→二极管Z→24-23接点→电机线圈→41-42接点→分线盘X5→FBJ线圈端子4。
S700K型转辙机表示电路典型故障主要有:(1)A14表示正常电压;(2)A15表示FBJ短路;(3)A16表示室外混线;(4)A17表示电源故障或室内公共部分断线;(5)A18表示R1短路;(6)A19表示二极管短路;(7)A10表示X5室内断线;(8)A21表示X5室外断线;(9)A22表示X3室内断线;(10)A23表示X3室外断线;(11)A24表示X1室外断线;(12)A25表示整流匣短路。
C1表示FBJ继电器1-4端电压;C2表示R1两端电压;C3表示X1、X3间电压;C4表示X1、X5间电压;C5表示X3、X5间电压。反位表示故障时的部分电气特性参考值,见表2。

表2 反位表示故障时的部分电气特性参考值
3 网络训练与测试
S700K型转辙机控制电路,由表1知,其启动电路监测参数为6种;由表2知,其反位表示电路的监测参数有10种。因此,BP神经网络的输入层神经元数M为16;启动电路和反位表示电路的故障类型共有25种,因此,BP神经网络的输出层神经元数L为25。基于Matlab工具箱,建立BP神经网络模型算法,设置学习率为0.05,动量系数为0.9,最大训练次数为5000,将归一化的若干样本进行训练。训练过程收敛速度快,误差小,如图5所示,为训练目标为0.001的误差曲线,可看出网络在经过10次训练后,网络的性能达到要求。

图5 训练目标为0.001的误差曲线
将待测的归一化样本进行测试,实际值与理想值的误差对比,如图6所示,最大误差为.0.1275,这说明,针对S700K星转辙机控制电路建立的BP神经网络模型很好地表达了控制电路故障和各个影响因素之间的内在联系与规律。

图6 实际值与理想值的误差对比
4 结束语
本文针对S700K星转辙机控制电路故障定位和检测精度不高,故障延时长的现状,通过分析于S700K转辙机控制电路的特点,建立了基于BP神经网络的故障诊断模型,并对其容易陷入局部最小值和收敛速度慢的缺点进行了改进。测试结果表明了该方法的有效性和准确性,效果良好,能够满足轨道交通现场的实际需求,并且对ZYJ7型电液转辙机、ZD6星电动转辙机控制电路的故障诊断有一定的借鉴意义。
[1]AtamuradovV,CamciF,BaskanS,etal.Failurediagnosticsfor railwaypointmachinesusingexpertsystems[C],Diagnostics forElectricMachines,PowerElectronicsandDrives,2009. SDEMPED2009.IEEEInternationalSymposiumon.IEEE,2009∶1-5.
[2]RobertsC,DassanayakeHPB,LehrasabN,etal.Distributed quantitativeandqualitativefaultdiagnosis∶railwayjunction casestudy[J].ControlEngineeringPractice,2002,10(4)∶419-429.
[3]翟永强.贝叶斯网络在道贫控制电路故障诊断中的应用研究[D].兰州交通大学,2012.
[4]赵林海,陆桥.基于灰关联的道岔故障诊断方法[J].铁道学报,2014,36(2)∶69-74.
[5]施彦,韩力群,廉小亲.神经网络设计方法与实例分析[M].北京∶北京邮电大学出版社,2009∶17-29.
[6]孙启发.S700K道岔转换与锁闭设备原理及维护知识[M].北京∶中国铁道出版社,2001∶14-56.
[7]董玉峰,谭丽.S700K转辙机控制电路故障的智能分析与定位[J].计算机测量与控制,2014,22(4)∶991-994.
U216.3
江门市基础与理论科学研究类项目,项目编号:20150030004128。
