自主潜航器姿态控制力矩陀螺群的DSP控制系统设计
2016-11-03张超华唐国元黄道敏朱秋晨
张超华,唐国元,黄道敏,2,朱秋晨
1华中科技大学船舶与海洋工程学院,湖北武汉430074
2武汉空军预警学院,湖北武汉430010
自主潜航器姿态控制力矩陀螺群的DSP控制系统设计
张超华1,唐国元1,黄道敏1,2,朱秋晨1
1华中科技大学船舶与海洋工程学院,湖北武汉430074
2武汉空军预警学院,湖北武汉430010
传统舵面执行机构在自主潜航器低速或零速状态时对其进行姿态控制舵效不足,为改善其操纵性能,引入框架控制力矩陀螺(CMG)作为自主潜航器的姿态控制执行机构,其中驱动系统由4台高速无刷直流电机及4台减速电机组成。考虑到自主潜航器对控制力矩陀螺电机的性能要求,设计了以数字信号处理器(DSP)TMS320F2812为核心的永磁无刷直流电机与蜗轮蜗杆减速电机调速控制系统,包括DSP主控模块、PWM光电隔离模块、驱动模块、JTAG接口模块、RS-232串行通信模块等硬件电路及系统上、下位机的控制软件程序。设计并制作了外围电路板,实现了对无刷直流电机驱动的陀螺转子进行启动停止、转速给定、转速测量等控制任务,以及蜗轮蜗杆减速电机驱动的陀螺框架启停及正反转响应迅速。试验表明,所设计的DSP控制系统能较好地满足自主潜航器姿态控制需求。
潜航器;控制力矩陀螺;姿态控制;数字信号处理器;无刷直流电机
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160921.1323.010.html期刊网址:www.ship-research.com
引用格式:张超华,唐国元,黄道敏,等.自主潜航器姿态控制力矩陀螺群的DSP控制系统设计[J].中国舰船研究,2016,11(5):107-112,142.
ZHANG Chaohua,TANG Guoyuan,HUANG Daomin,et al.Design of the autonomous underwater vehicle control moment gyro system based on DSP[J].Chinese Journal of Ship Research,2016,11(5):107-112,142.
0 引言
自主潜航器的运动姿态控制是其完成指定任务的前提与保障。随着自主潜航器在海洋领域应用的更加专业化以及多样化,为提高自主潜航器的工作效率、寿命、机动性及抵御恶劣环境的能力,一种内置式的新型自主潜航器姿态控制执行机构——框架控制力矩陀螺(CMG)相继被提出[1],期望利用旋转装置陀螺效应产生的附加力矩去控制自主潜航器的姿态。自主潜航器在海洋资源勘测开发与海军武器战略部署方面具有广阔的发展前景和巨大的应用价值,与传统的“螺旋桨+舵”执行机构相比,采用内部CMG执行机构不仅可以避免海水腐蚀,还可不依赖于流体的相对运动,甚至可用于低速或零速的场合,有利于保持壳体的完整性,更易于优化设计。
CMG是一种动量交换装置,由匀速转动的陀螺转子以及支撑转子的外框架组成,通过框架转动驱使陀螺转子的角动量方向发生改变从而实现力矩输出。控制力矩陀螺输出力矩大、动态响应快、工作稳定可靠,满足大型航天器姿态控制和快速机动的要求,目前已在国内外的航天领域得到广泛应用[2]。唐国元等[3]建立了基于CMG的自主潜航器运动学与动力学模型,并且考虑到自主潜航器可能进行的大姿态角机动,其采用欧拉四元数方法建模,通过深入的理论研究与仿真分析,充分肯定了控制力矩陀螺在自主潜航器姿态控制系统中的应用价值,并在文献[4]中设计并研制了相应的姿态控制力矩陀螺群(CMGs),其中驱动系统由4台高速无刷直流电机及4台蜗轮蜗杆减速电机组成。
无刷直流电机利用电子换向器取代了传统直流电机中的电刷和机械换向器,极大地提高了电机的工作效率与调速性能,利用它来驱动陀螺转子具有速度稳定、运行可靠等优点[5];蜗轮蜗杆减速电机输出力矩大、转动平稳,利用它来驱动陀螺框架满足系统控制需求。电机的控制方案有许多种,如基于单片机的电机调速控制系统[6]、基于FPGA的电机驱动控制系统[7]和采用数字信号处理器(Digital Signal Processor,DSP)作为主控制器的控制系统[8]。由于DSP的控制精度高、数据处理能力强、接口丰富,本文将以TMS320F2812 DSP芯片作为控制核心,设计无刷直流电机与蜗轮蜗杆减速电机的调速驱动控制系统。
1 控制系统原理
在自主潜航器姿态控制系统中,4个单框架控制力矩陀螺呈金字塔构型布置于潜航器内部,组成控制力矩陀螺群,由潜航器内部2个平行的导槽进行位置固定,如图1所示(图中除去了潜航器尾部的螺旋桨部分)。陀螺外框架转动将使陀螺转子的角动量方向发生改变,从而产生陀螺力矩作用在框架基座(潜航器壳体)上,驱动自主潜航器完成姿态机动任务。陀螺转子转速快,稳速精度高,采用永磁无刷直流电机驱动控制;陀螺框架转速低,速度变化快,采用蜗轮蜗杆减速电机驱动控制。因此,基于CMGs的自主潜航器姿态控制系统的核心就是对4台无刷直流电机与4台蜗轮蜗杆减速电机的转速的控制,通过结合力矩陀螺群金字塔构型的姿态控制律与陀螺操纵律,实时调整电机的工作状态,从而确保实现三轴稳定的力矩输出。姿态控制系统整体框图如图2所示。
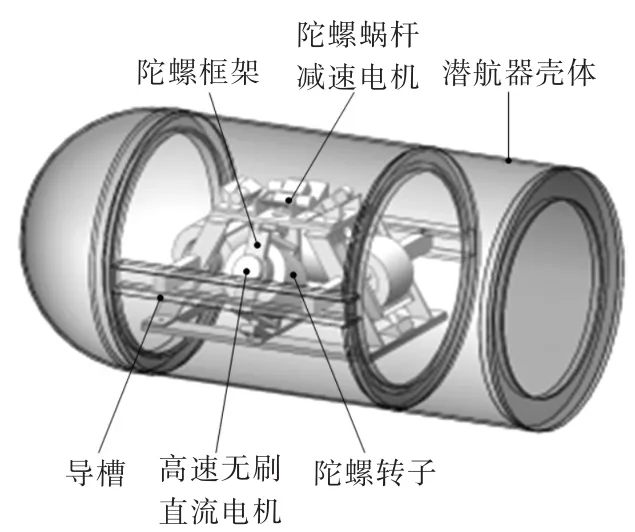
图1 CMGs构型及安装示意图Fig.1The configuration and installation diagram of CMGs

图2 控制系统原理框图Fig.2Control system block diagram
2 系统主要硬件电路设计
本系统采用一块型号为TMS320F2812的DSP芯片加外围电路以及驱动电路来实现对4台高速无刷直流电机与4台蜗轮蜗杆减速电机的控制,电机控制系统原理框图如图3所示(图中只列出了1台无刷直流电机与2台蜗轮蜗杆减速电机的控制原理,其余电机控制方法与此类似)。

图3 电机控制系统原理框图Fig.3The control system block diagram of motors
电机控制系统主要由PC上位机、2812主控芯片、光电隔离电路以及驱动电路组成。其中:PC上位机主要进行数据发送、接收与显示任务;以TMS320F2812芯片为核心的控制部分负责控制运算、PWM转速脉冲输出及转速测量等任务;驱动电路将DSP芯片输出的弱电控制信号进行功率放大,输出具有一定驱动能力的强电信号去控制电机的运转。由于DSP控制器芯片I/O口的工作电压为3.3 V,而所选用无刷直流电机集成驱动器DBLS-02与蜗轮蜗杆减速电机驱动芯片L298N的引脚工作电压均为5 V,即TMS320F2812 DSP芯片输出的控制信号不足以触发电机驱动器内部功率管的通断,因此本系统还需采用一光耦合器对控制部分和功率驱动部分进行光电隔离,这样既可实现不同电压之间的信号变换,又能防止控制电路与驱动电路之间的电磁干扰。
2.1无刷直流电机驱动电路
无刷直流电机驱动电路选用智能集成驱动器DBLS-02,该控制驱动器为闭环速度型控制器,采用最新型的IGBT和MOS功率器件,控制环节设有PID速度调节器,通过对无刷直流电机的霍尔信号进行倍频来实现闭环速度控制。该电机驱动器不仅具有欠压检测、过流保护、霍尔信号故障报警等保护功能,而且其斩波频率达1 kHz,占空比可在0%~100%内变化,能够处理0~5 V电平的标准逻辑信号。无刷直流电机与驱动器连接方式如图4所示。
无刷直流电机的启停、正反转及刹车信号是通过DSP芯片引脚输出的高低电平进行控制,DSP在接收到霍尔传感器反馈的电机速度信号后,经过控制算法处理及光电隔离电路,即可输出幅值为5 V、频率为1 kHz的脉冲宽度数字信号(PWM),该信号施加在驱动器调速电压输入端,电机转速受其占空比的线性调节。

图4 驱动器连接原理图Fig.4Drive's wiring diagram
2.2蜗轮蜗杆减速电机驱动电路
蜗轮蜗杆减速电机驱动系统由L298N驱动芯片加外围电路搭建而成,驱动电路原理图如图5所示。L298N是SGS公司生产的一种体积小、驱动能力强的高效脉宽调制功率放大器件,其内部包含2个H桥型高电压大电流全桥式驱动单元,采用标准TTL逻辑电平控制,可以用来驱动2台直流电机[9]。引脚ENA(ENB)为使能端,外接DSP芯片输出的PWM调速信号可以实现对蜗轮蜗杆减速电机1(电机2)的速度控制,IN1,IN2(IN3,IN4)为电机转向控制输入端,通过对这2个引脚输入不同组合的高低电平来控制电机的启停与正反转。D1~D8为续流二极管,用来释放电机启停瞬间线圈绕组所产生的自感电动势,以保护功率开关器件。D9~D12为电机转动方向指示灯,用于显示电机正反转状态。

图5 L298N驱动电路原理图Fig.5The drive circuit diagram of L298N
2.3光电隔离电路
本系统采用6N137光耦合器对控制部分和功率驱动部分进行光电隔离。6N137芯片内部由1个850 nm波长的LED和1个集成检测器组成,集成检测器用来识别LED发出的光信号并将其转换为电信号,用以控制后续外围电路的通断,实现光电隔离。6N137外围连接电路如图6所示。TMS320F2812主控芯片输出的幅值为3.3 V、频率为1 kHz的PWM波形经6N137光耦合器处理之后,即可得到电机驱动器所需的幅值为5 V、频率为1 kHz的PWM控制信号,实现了不同电压之间的信号变换,同时又能防止控制电路与驱动电路之间的电磁干扰。

图6 6N137光耦合器外围电路图Fig.6The external circuit of 6N137
2.4串行通信及仿真接口电路
TMS320F2812芯片具有异步串行通信接口SCI,该接口可以外接MAX3232芯片,实现与上位机的串行通信功能。MAX3232是符合RS-232标准的驱动芯片,集成度高,功耗低,采用+3.3 V供电,具有2个接收和发送通道,通过标准DB9接口实现控制系统与上位机的连接[10]。MAX3232串行通信接口原理如图7所示。
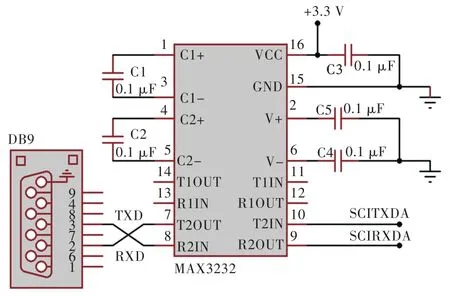
图7 串行通信接口原理Fig.7Principle of the serial interface
联合测试工作组(Joint Test Action Group,JTAG)接口主要用于程序的下载、调试和烧录,支持在线调试仿真,能够大幅降低DSP系统硬件开发的难度。TMS320F2812芯片与外部JTAG电缆相连是通过标准14引脚仿真接口来实现的,该端口提供了5个标准的JTAG调试信号(TRST,TCK,TMS,TDI,TDO)和2个仿真节点(EMU0,EMU1)[11]。JTAG接口外围电路如图8所示。

图8 JTAG接口外围电路Fig.8The JTAG circuit
3 控制系统软件设计
CCS(Code Composer Studio)是目前应用最为广泛的DSP系统集成开发环境,利用它进行TMS320F2812的程序设计是控制系统软件设计的核心部分。无刷直流电机控制系统软件采用模块化设计思想,主要包括系统初始化模块、定时器中断响应模块、反馈信号采集与处理模块、PWM波形产生与控制模块。系统软件设计流程如图9所示。
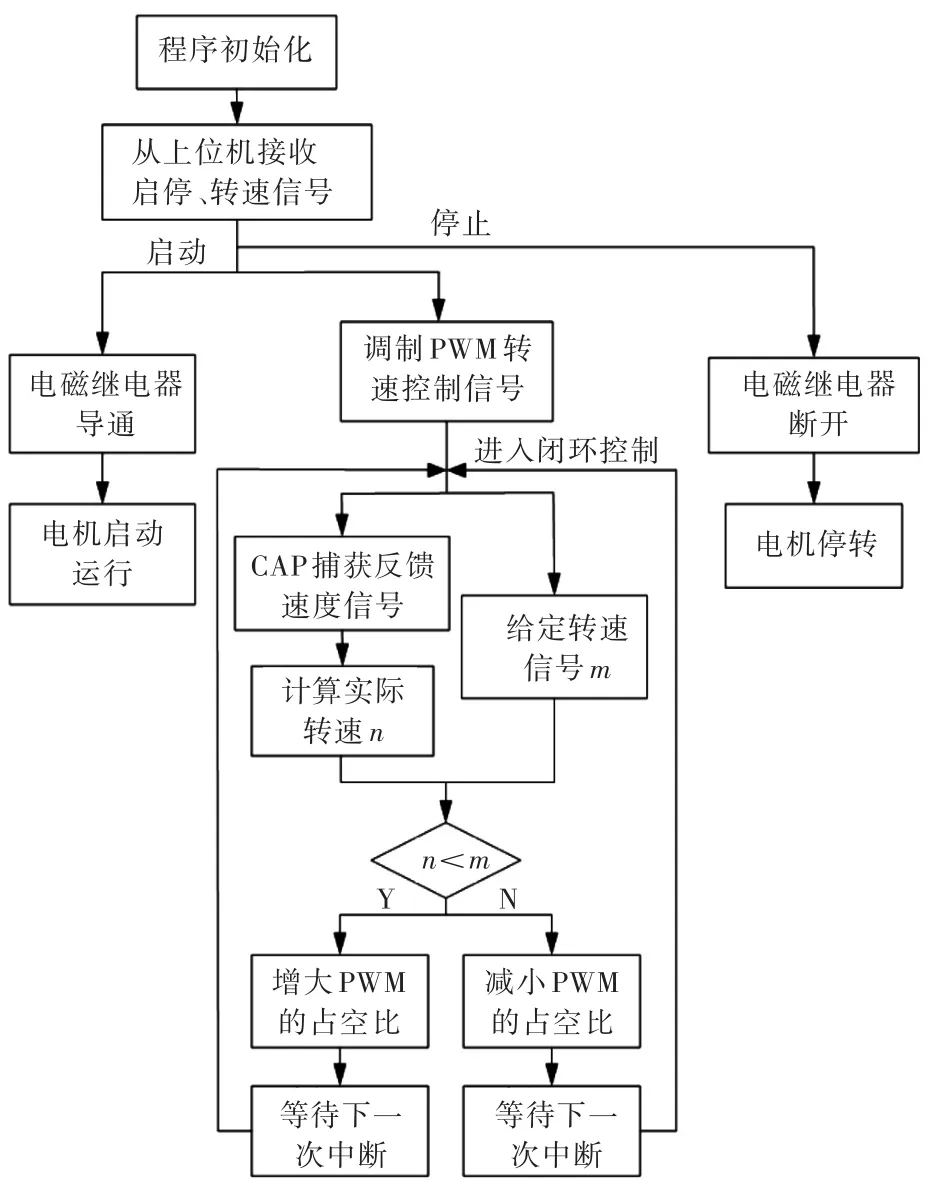
图9 电机控制系统软件流程图Fig.9The software flowchart of motor control system
系统上电复位后,主程序首先完成系统的初始化任务,包括关闭看门狗、配置PLL时钟、设定GPIO口工作模式、初始化DSP事件管理器模块等,然后等待上位机控制指令及系统周期中断的到来。系统有2级中断,事件管理器中断和串口中断,其中串口中断又分为发送中断与接收中断,负责发送系统信息给上位机并接收上位机的控制指令。事件管理器中断由DSP通用定时器产生,每当通用定时器的计数寄存器(TxCON)与周期寄存器(TxPR)的值相等时,发生事件管理器中断,系统进入中断处理子程序,并将捕获单元(CAP)获得的电机实际转速数据与上位机给定的转速数据相比较,若未达到给定速度,则继续增大PWM的占空比,以提高电机转速并等待下一次定时器中断的到来;若电机转速达到给定速度,则保持PWM的占空比不变,电机稳速运行。
4 试验结果
前面设计了无刷直流陀螺电机与蜗轮蜗杆减速电机系统的驱动控制方案,根据上述硬件电路原理与软件设计流程,制作外围电路板并向TMS320F2812主控芯片中写入控制程序,进行直流电机驱动CMGs的控制试验。

图10 无刷直流陀螺电机升速与稳速曲线Fig.10The acceleration and steady velocity curve of DC motor

图11 电机稳速条件下的PWM控制波形Fig.11The PWM control signal of motors in steady velocity
无刷直流电机的额定电压为24 V,额定转速为10 000 r/min,电机转速控制信号PWM的占空比每隔1 s增加0.2%,直至电机达到目标转速稳定运行。设定目标转速为4 000 r/min,试验测得电机从零速启动至目标转速的升速过程及稳速曲线如图10所示,速度稳定之后,相应的调速控制输入PWM波形如图11所示。从图示的测试结果可以看出,无刷直流陀螺电机启动过程平稳,当施加在电机驱动器调速电压输入端的PWM信号的占空比增大至40%时,电机达到目标转速,稳定在4 000 r/min左右运行,系统控制精度高,具有良好的动态性能。蜗轮蜗杆减速电机的额定工作电压为12 V,额定转速为6 r/min,给定一正弦速度输入控制信号,测得其输出响应曲线如图12所示。可以看出,蜗轮蜗杆减速电机的启停与正反转响应迅速,可以实时改变陀螺框架的运转状态。
在实验室对自主潜航器进行了姿态机动原理验证性试验,即将潜航器水平悬挂于空中,陀螺框架与陀螺转子按给定速度变化规律运行,观察潜航器在水平面内的姿态机动效果。艇体姿态变换过程如图13所示。由图可以看出,大约在10 s时间范围内,姿态传感器测得潜航器在水平面内沿逆时针方向旋转了70°,姿态角度变化明显,所设计的控制力矩陀螺群DSP控制系统从原理上能够满足自主潜航器的姿态控制需求。
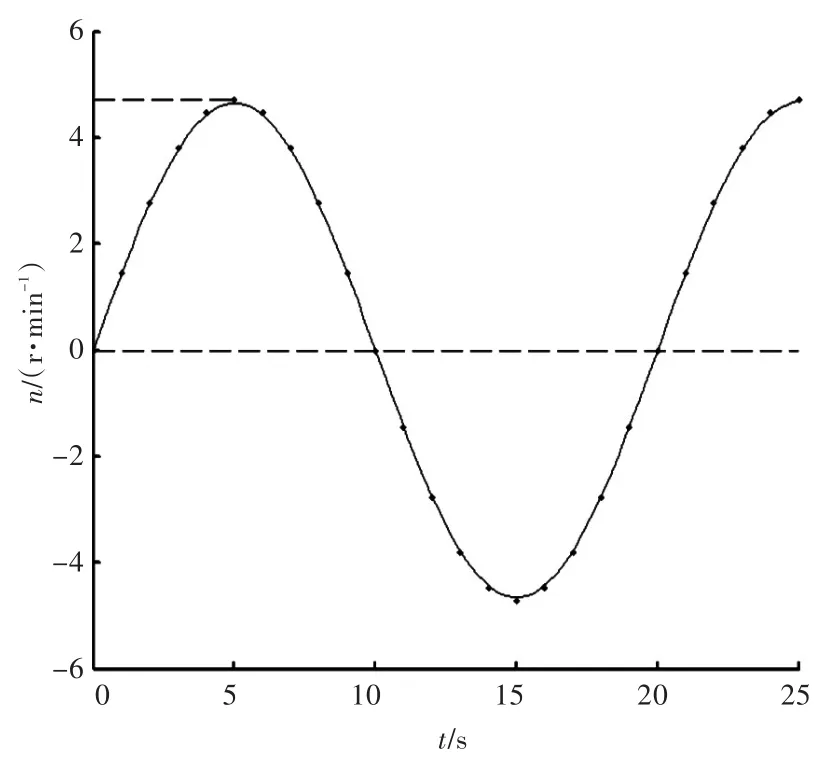
图12 蜗轮蜗杆减速电机速度响应曲线Fig.12The speed response curve of worm gear reducer motor

图13 自主潜航器姿态机动过程图Fig.13Attitude changes of the autonomous underwater vehicle
5 结语
本文以TMS320F2812 DSP芯片作为控制核心,设计了自主潜航器姿态控制力矩陀螺群的驱动控制系统,并完成了系统硬件电路设计与软件开发工作。在此基础上,搭建试验平台,进行CMGs的驱动控制及自主潜航器的姿态机动试验,结果表明,无刷直流电机所驱动的陀螺转子启动过程平稳,能在期望的转速下稳定运行;蜗轮蜗杆减速电机输出力矩大,所驱动的陀螺框架动态响应迅速,满足系统控制需求。控制力矩陀螺群的DSP控制系统工作稳定,潜航器在空气环境下姿态机动效果明显,充分说明了CMGs作为自主潜航器姿态控制执行机构的有效性与可行性。
[1]THORNTON B.The development of zero-G class underwater robots:unrestricted attitude control using control moment gyros[D].Southampton:University of Southampton,2006.
[2]刘承,刘向东,李黎.基于DSP的控制力矩陀螺外框驱动控制系统设计[J].电气传动,2006,36(9):29-31,43. LIU Cheng,LIU Xiangdong,LI Li.Design and application of the control system of SGCMG based on DSP[J].Electric Drive,2006,36(9):29-31,43.
[3]唐国元,徐正武,黄道敏,等.基于姿态控制力矩陀螺的水下航行体运动建模方法研究[J].中国造船,2014,55(2):18-27. TANG Guoyuan,XU Zhengwu,HUANG Daomin,et al.Research on the modeling approach for underwater craft's motion based on control moment gyros[J].Shipbuilding of China,2014,55(2):18-27.
[4]王灿,唐国元,黄道敏.基于集成电路的控制力矩陀螺控制系统设计[J].机械与电子,2015(6):47-50. WANG Can,TANG Guoyuan,HUANG Daomin.The design of control moment gyro system based on integrated circuit[J].Machinery&Electronics,2015(6):47-50.
[5]KIM D K,LEE K W,KWON B L.Commutation torque ripple reduction in a position sensorless brushless dc motor drive[J].IEEE Transaction on Power Electronics,2006,21(6):1762-1768.
[6]王严.基于单片机的无刷直流电机控制系统设计与实现[D].南京:南京邮电大学,2013. WANG Yan.Design and realization of brushless DC motor control system based on MCU[D].Nanjing:Nanjing University of Posts and Telecommunications,2013.
[7]倪飞.基于FPGA的无刷直流电机控制系统实现[D].重庆:重庆大学,2013. NI Fei.Quasi-sine wave brushless DC motor control andsystemimplementationbasedonFPGA[D]. Chongqing:Chongqing University,2013.[8]刘兆卿,王喜太,王淼.基于DSP无刷直流电机控制系统的研究及其仿真[J].微计算机信息,2011,27(9):102-104. LIU Zhaoqing,WANG Xitai,WANG Miao.The research of DSP-based brushless DC motor control system and simulation[J].Microcomputer Information,2011,27(9):102-104.
[9]雷红淼,程耀瑜.基于L298N的直流电机驱动电路优化设计[J].数字技术与应用,2012(2):118,120. LEI Hongmiao,CHENG Yaoyu.Design of DC motor drive circuit based on L298N[J].Digital Technology and Application,2012(2):118,120.
[10]何苏勤.DSP系统与实验教程[M].北京:电子工业出版社,2013. HE Suqin.DSP system with experimental tutorial[M]. Beijing:Electronics Industry Publishing House,2013.
[11]岂兴明,胡小东,周火金.DSP嵌入式开发入门与典型实例[M].北京:人民邮电出版社,2011. QI Xingming,HU Xiaodong,ZHOU Huojin.Getting started and typical examples of dsp embedded development[M].Beijing:Posts&Telecom Press,2011.
Design of the autonomous underwater vehicle control moment gyro system based on DSP
ZHANG Chaohua1,TANG Guoyuan1,HUANG Daomin1,2,ZHU Qiuchen1
1 School of Naval Architecture and Ocean Engineering,Huazhong University of Science and Technology,Wuhan 430074,China
2 Wuhan Air Force Early-Warning Academy,Wuhan 430010,China
To improve the low velocity control performance of Autonomous Underwater Vehicles(AUVs),a single gimbal Control Moment Gyro(CMG)is introduced as the attitude control system,the drive system of which consists of four brushless DC motors and four reducer motors.Considering the need of AUV for CMG motors,a steady-speed control system is presented in which the brushless DC motors and worm gear reducer motors are based on TMS320F2812.The DSP controller module,PWM photoelectric buffer module,drive module,JTAG interface module,RS-232 SCI module and software program of the system are included.In building the peripheral circuit,only a single DSP chip is employed to control the starting or stopping and realize the measurement of the working statement of the four brushless DC motors,and the forward or reverse response speed of the worm gear reducer motors can also be accepted.The experiment shows that the designed DSP control system of CMG can satisfy the attitude control requirements of AUVs.
autonomous underwater vehicle;moment control gyro;attitude control;Digital Signal Processor(DSP);brushless DC motor
U674.941
A
10.3969/j.issn.1673-3185.2016.05.016
2015-12-15网络出版时间:2016-9-21 13:23
湖北省自然科学基金资助项目(2013CFB154);上海交通大学海洋工程国家重点实验室开放基金资助项目(1304)
张超华(通信作者),男,1991年生,硕士生。研究方向:舰船与水下航行体运动控制,硬件电路开发。
E-mail:1254792966@qq.com
唐国元,男,1973年生,博士,副教授,硕士生导师。研究方向:舰船与水下航行体运动控制,舰船机电控制系统。E-mail:tgyuan@yeah.net
黄道敏,女,1971年生,博士。研究方向:水下机器人,机电控制技术。
E-mail:392821027@qq.com
