基于北斗导航的短消息收发信道系统的研究与设计
2016-11-02杨小莹
卢 彪,杨小莹,李 悦
(宿州学院 信息工程学院,安徽 宿州 234000)
基于北斗导航的短消息收发信道系统的研究与设计
卢彪,杨小莹,李悦
(宿州学院 信息工程学院,安徽 宿州 234000)
GPS定位系统和GLONASS导航系统是目前应用最广泛的导航技术,提高北斗导航的数字信号收发信道的工作效率可以增强北斗导航系统的市场竞争力。通过对北斗导航信号收发机的工作原理和工作流程的探讨,设计了北斗导航短消息收发信道系统。该系统中的3个模块是北斗导航短消息收发信道系统的核心技术,这提高了北斗导航系统的市场竞争力。设计合理的短消息收发信道系统,对提高北斗系统的工作效率和导航精确度至关重要。
北斗导航;ENC28J60模块;SFM953DEQRF模块;A/D数据转换模块
国内目前使用的导航系统主要是美国的GPS定位系统和俄罗斯研发的GLONASS导航系统。这些导航技术可以通过移动通信运营基站实现快速定位,广泛应用于含有GPS功能的手机、汽车工业等领域[1]。这两项导航系统的主要缺点是短消息容易丢失,并且存在一定的安全隐患。
中国北斗导航系统是中国自行研制的全球导航系统,北斗导航系统在系统功能上和GPS相差无几。但是,从技术角度来看,北斗导航系统在地理定位、数据采集、A/D转换等核心技术上与GPS技术还存在一定的差距。这就要求必须大力研发导航系统的核心技术,增加市场竞争力[2]。
短消息收发信道的传输效率是北斗短消息收发机工作性能的关键技术[3],该系统主要完成的工作内容是北斗导航的短消息收发信道系统的研究与设计,其内容包括了编解码ENC28J60模块、数据采集SFM953DEQRF模块和A/D数据转换模块3个方面。
1 北斗导航短消息收发机的工作原理
1.1北斗导航短消息收发机硬件平台
北斗短消息收发机硬件构成模块主要包括:短消息收发天线模块、消息编码模块、消息解码模块和消息传送模块。短消息收发天线模块主要用于收发北斗无线短消息;消息编码模块主要实现消息的纠错编码功能,并且把编码无线消息通过中间短消息放大器进行数/模处理成模拟消息;消息解码模块主要是将编码无线消息处理的模拟短消息进行数据采集,完成短消息收集、追踪、模式识别、时钟同步和导航短消息的地理位置定位解码;消息传送模块主要完成的功能是将导航信息包括地理位置、速度计算等提供给客户来完成相应需求。
北斗短消息收发机硬件架构工作流程如图1所示。
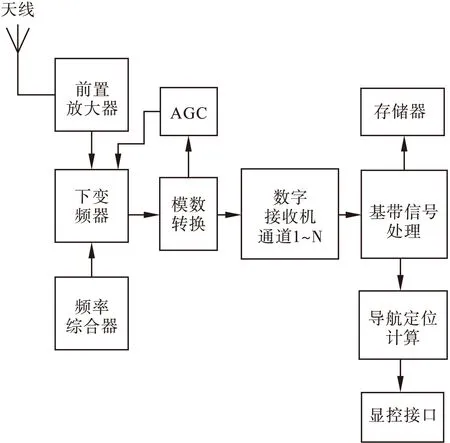
图1 北斗短消息收发机硬件架构工作流程
天线将无线信号通过前置放大器进行信号放大输出到下变频器中(频率综合器负责频率调整),经过模数转换模块将数字信号传递至数字接收机中(AGC负责信号补偿),信号编解码模块负责数据相应的存储、导航定位计算等核心功能。从图1中可以看出信号编解码模块是北斗接收机中的核心处理模块。
1.2收发机的工作过程
在短消息收发天线模块端主要存在的信号数据包括数字信号、模拟信号和导航信号等[4]。为了能够正确接收发射导航信号数据编码,编解码短消息模块必须从众多频率的信号中解析出正确的导航消息,并且短消息中还包括相位移动信号。此外,核心算法模块为了信号的准确性和安全性,还要采用信号模式识别等技术来处理导航信号数据,即导航信号的频率接收。
为了导航数据传输的高效性和地理位置定位的准确性,信号收发信道还要通过信号追踪技术不断调制解调信道中的信号相位转移,促使信号的接收和发射频率都在同一个频段中。通过信号频率的变频转移技术实现干扰信号的消除。同时,信号收发信道实时追踪处理信号转移频率,不断调整模拟信号和数字信号的转换速率,以实现信号收发过程中传输信道正常高效地进行信号处理。
2 收发信道的工作原理
信号收发天线是北斗短消息收发机的终端器件,天线可以将导航发射的电磁波短消息通过模数转换技术实现模拟信号到数字信号的过渡。由于短消息信号容易产生衰老,必须通过信号放大技术对消息进行放大处理。当传递结束后,还要进行信号消息衰减处理,然后将信号消息进行频率变换。由于数字短消息比模拟短消息在硬件处理上具备先天优势,所以数字消息是最终的处理消息,进而进行最终的编解码短消息处理[5]。
当收发的导航数据消息经过模拟信号到数字信号的处理后,首先进行数字信号消息的数据采集,然后将采集消息进入到地理位置定位计算阶段。经过短消息的定位处理,搜寻到消息位移的相位变化。数据采集技术和位置定位技术是通过无线芯片实现的,根据导航信号的相位转移计算出导航数据的包结构和完整的地理位置定位信号。从导航数据中可以看出导航在空间站中的位置,利用导航的定位信号确定北斗信号收发机的地理位置,最终实现导航功能。
2.1导航短消息的数据采集
北斗导航使用的是窄带变频系统,窄带变频技术的数据采集是利用收发机编码和解码的位移处于同一个数据节点段,且数据接收和发射的调制解调处于同一相位。相位转移实现了短消息的采集时钟同步,对于导航短消息的数据采集主要涉及的内容为编解码的数据采集和数模转换的数据采集。
导航短消息数据采集的步骤主要包括3个方面:编解码信号采集、相位转移信号采集、数模数据转换信号采集[6]。当数据采集检测到导航短消息的收发频率后,立刻进行短消息的数据采集编解码处理。当所有数据采集动作完全执行后,进入到短信息追踪模块,完成导航短消息的模式识别。
导航短消息的数据采集流程如图2所示。
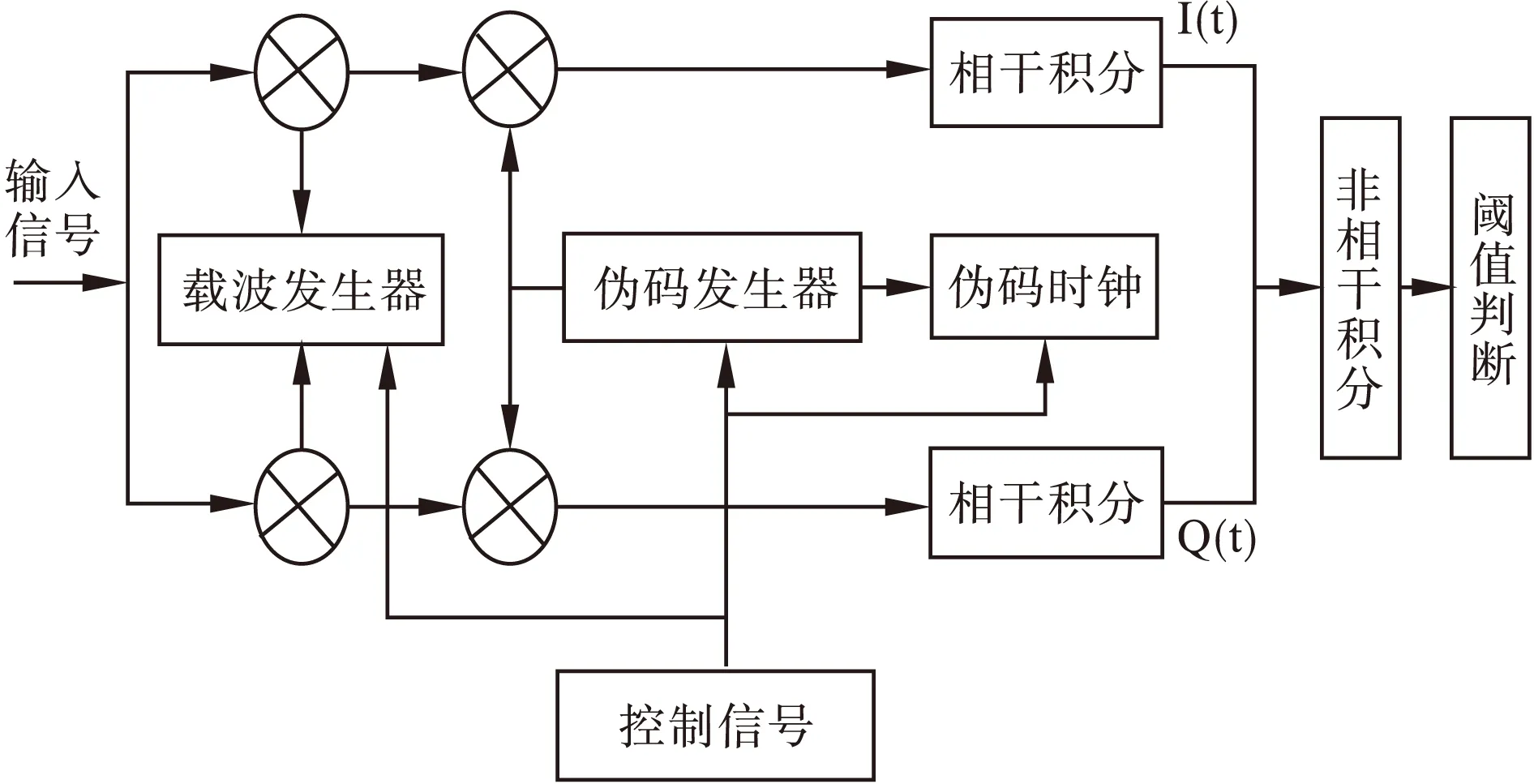
图2 导航数据采集流程
输入信号进入导航系统后,通过载波发生器进行信号分路处理,得到两路频率信号。随即进行相位转移计算,经过伪码发生器的伪码频率混合处理、伪码时钟控制、控制信号的处理和相干积分处理得到短消息的值。最后,经过非相干积分值伪码相位转移处理编码,得到编解码信号的阈值判断。
经过伪码的积分计算以及相位转移,完成短信息的收发频率一致性处理。当导航短信息不含随机编解码时,控制信号处理模块就要进行通过导航变换来改变编解码消息的传递信道继续实现导航定位功能。
2.2导航短消息追踪实现
跟踪模块在数据采集实现的基础上实现信号频率同步和相位转移,工作步骤主要包括了导航短信息的频率短消息的追踪技术和伪随机编解码短消息追踪技术[7]。为了实现上述两种追踪目的,追踪通信信道设计了两套追踪路径:路径1是追踪信号频率同步,路径2是追踪伪随机编解码短消息。两条追踪路径必须同时进行,追踪流程如图3所示。
当输入信号进入导航系统之后,继续使用载波发生器、伪码发生器来进行相应的信号分路处理以及积分计算。这里,信号分路主要分成两路,同时进行信号的滞后同相、中间同相和超前同相积分处理:一路信号进行载波环鉴相器和载波环滤波器的处理;另一路信号进行码环鉴相器和码环滤波器的处理,最终完成追踪环路的工作流程。
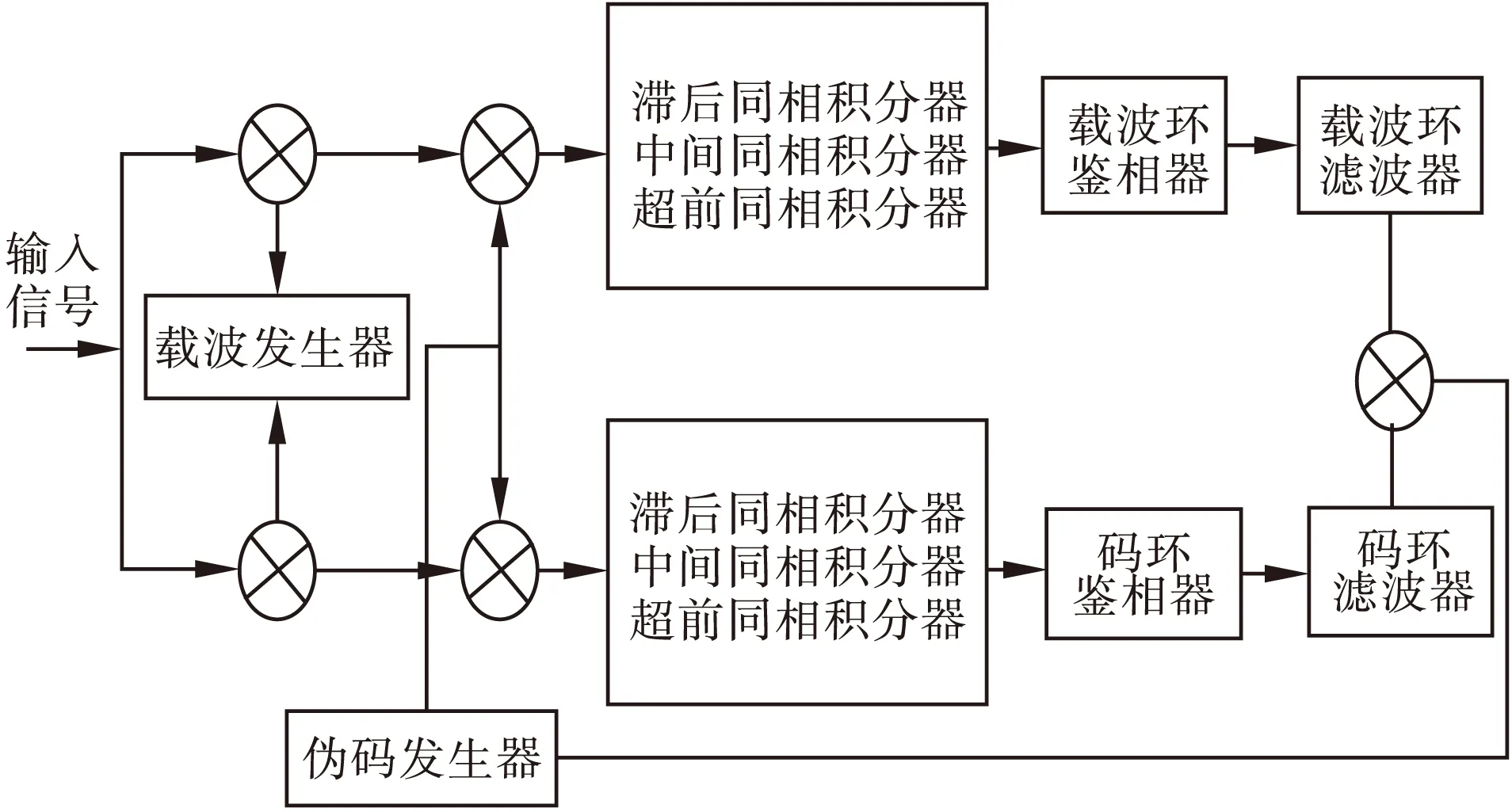
图3 追踪输入信号流程
通过输入信号的追踪积分变换工作流程可以看出,北斗导航短消息收发机硬件的实现主要在消息编解码模块、数据采集模块与数/模数据转换模块上。这3个方面最终决定了北斗导航短消息收发机的工作效率和准确度,设计合理的北斗导航编解码数字收发信道对提高北斗系统的工作效率和导航准确性至关重要。
3 北斗信号收发信道系统设计
3.1北斗信号收发信道系统总体架构设计
信号收发信道系统的设计包括软件设计和硬件设计两个方面,信号编解码和信号数模相位转换通过专用无线通讯模块来实现。采用无线通讯编解码芯片模块ENC28J60、SFM953DEQRF模块和A/D转换模块设计的北斗信号收发信道系统总体结构如图4所示。
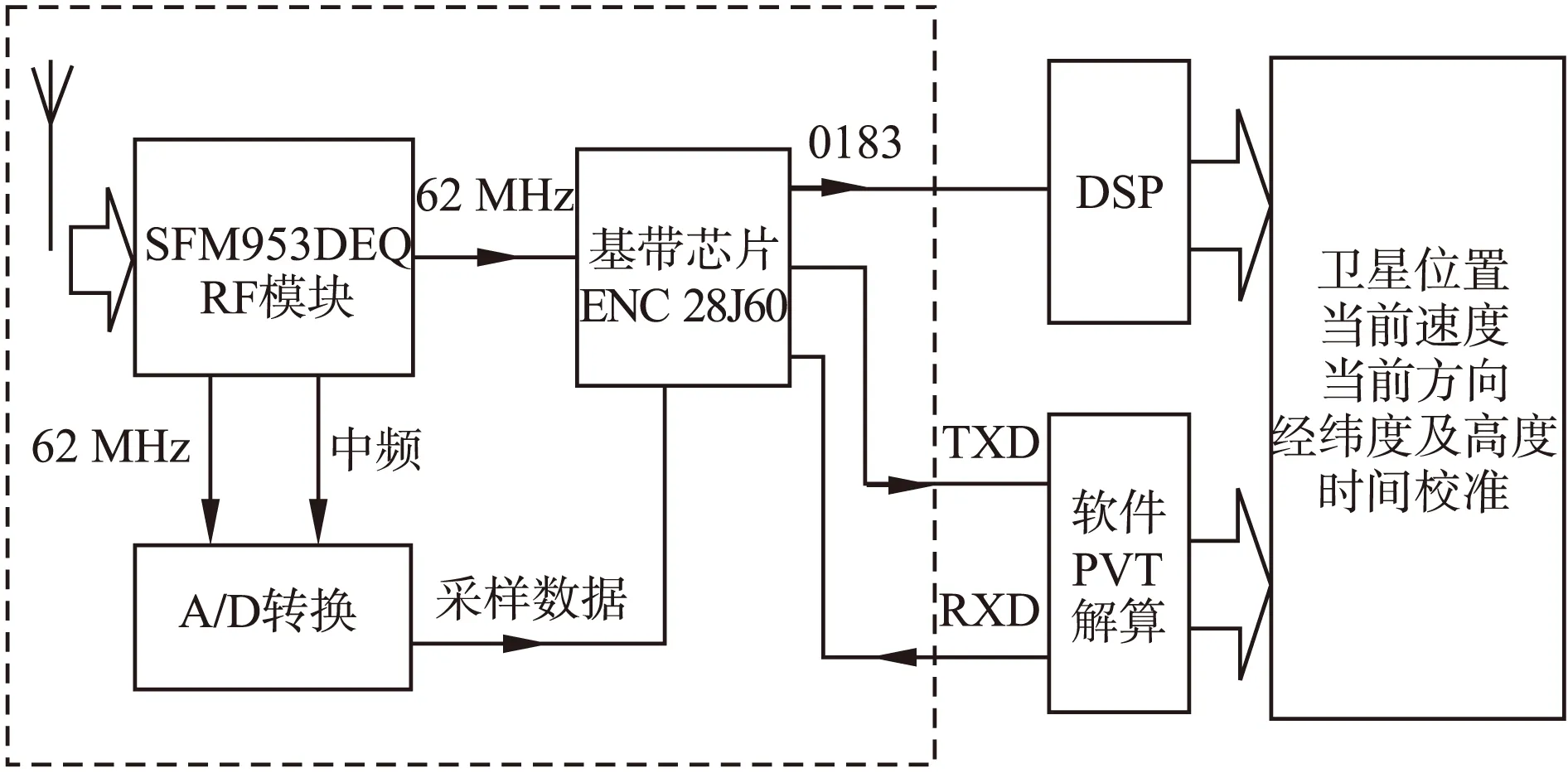
图4 信号收发通道系统总体结构
天线模块传送的导航短信息经过SFM953DEQRF模块处理后,实现信号频率转换和信号分路处理。分路处理功能主要包括62MHz时钟同步以及模数转换,转换后的信号经过采样处理后进行数据输送进无线采集模块ENC28J60。采集模块完成数据处理后,进行两路信号输出:一路进入DSP电路板;另一路进入软件PVT解算实现卫星位置的定位、终端当前运动速度、终端当前前进方向、终端经纬度、高度和时钟同步的时间校准。
设计内容主要为图4中左半部分,包括ENC28J60数据处理模块设计、SFM953DEQRF数据采集模块设计和A/D数据转换模块设计3部分。
3.2ENC28J60数据处理模块设计
ENC28J60芯片是北斗导航系统收发通道的核心信号处理模块,它对整套系统的工作效率和定位准确性起到关键作用,芯片的工作流程必须科学。ENC28J60芯片初始化流程主要包括:①上电复位;②初始化串口;③开锁相环124MHZ时钟;④停止信号捕获;⑤关闭窄相关;⑥模基数配置;⑦观测量采样间隔设置;⑧辅助模式;⑨中频类型设置和数模转换频点设置;⑩设置环路参数。ENC28J60芯片初始化功能完成之后,要进行寄存器的参数调整、调用公用时钟完成时钟同步等功能设置。ENC28J60芯片的初始化过程如图5所示。
编解码芯片ENC28J60模块可以收发导航系统中的无线频率和模拟信号中的采样数据短消息。该无线通讯编解码芯片能够与地理位置定位芯片相结合,完成提前设计的导航短信息的数据采集、信号追踪、卫星数据的编解码、源定位数据信息的调用等功能,可以通过USB/API等软硬件接口实现卫星数据采集、定位数据采集和信号编解码信号采集的传送目的。无线通讯编解码芯片和导航地理位置定位芯片能够实现地位定位、终端速度检测、时钟同步等智能识别。
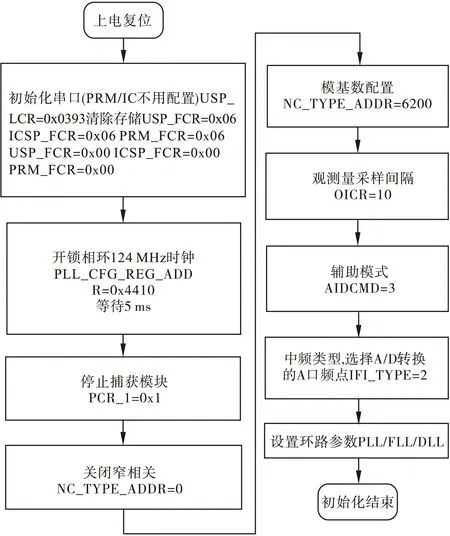
图5 ENC28J60芯片初始化流程
3.3SFM953DEQ RF数据采集模块设计
编解码芯片ENC28J60模块初始化后,数据采集模块就开始正常工作。SFM953DEQRF芯片检测信号输入通道的工作状态:若信道处于空闲状态,则输入信号正常进入系统芯片启动数据采集流程,否则芯片采集功能处于待机状态。
如果芯片正常工作过程中出现数据采集忙碌状态,随即进行数据采集中断清除空闲机制继续持续数据采集流程。当处于空闲状态,数据采集不间断进行;当处于忙碌状态,数据采集继续待机。
数据采集过程中要判断数据状态是处于编码状态还是解码状态。如果数据采集处于编码状态,要进行数据编码相位转移。如果处于解码状态,要进行数据采集控制寄存器的存储参数配置。配置内容包括了解码类型、导航类型、频率参数、信道值等。随后,启动数据采集模块,启动短消息传送功能,修改数据采集状态为忙碌,当数据采集出现中断或者结束状态时要进行审计数据采集存储值。采集的数据随后送到A/D转换模块中进行相应的数模转换,传送信道的2路信号输送处理能保证数据传送的高效率和高可靠性。
DSP电路板在SFM953DEQRF数据采集模块中实现的辅助功能包括:①数据采集追踪;②伪随机码的相位转移;③采集频率同步。数据采集追踪和伪随机码的相位转移要通过短消息的修复技术来实现窄带数据短消息处理、抗信号干扰和多目的地乱序等,短波积分过滤可以实现干扰信号的排除。过滤后的短消息通过北斗导航定位功能实现地理位置定位、运动轨迹定位和时钟同步等功能。
3.4A/D数据转换模块设计
A/D数据转换模块主要实现了两路信号分路处理功能,主要包括62MHz时钟同步以及中频信号的A/D转换。A/D数据转换输出的采样数据是8位数字短消息,该模块可以共存高、低频率地传送速率信号,但是高低频信号需要通过自适应的方式进行频率信道切换。高频率信号和低频率信号并不能同时进行传输,采样信号的输出配置为半双工工作模式,工作过程的高低频信号不能同时进行传送。
DSP电路板完成的辅助功能包括A/D转换的频率配置、控制A/D转换的传输速度等。导航短消息经过数模转换后利用采样数据输送至ENC28J60芯片,DSP电路板要设置ENC28J60芯片的数据采集存储器、追踪定位参数、数据采集频率控制等,导航定位数据计算完毕后与DSP电路板来提取地理位置、运行轨迹和时钟同步等信息,最终实现导航系统的业务功能。
4 结 语
短消息收发信道系统是北斗短消息收发机工作性能的关键技术,主要完成的工作内容是基于北斗导航的短消息收发信道系统的研究与设计,设计内容包括了编解码ENC28J60模块、数据采集SFM953DEQRF模块和A/D数据转换模块3个方面,这3个模块是北斗导航短消息收发信道系统的核心技术。设计合理的北斗导航短消息收发信道系统对提高北斗系统的工作效率和导航精确度至关重要,因此,要继续探索研究更新的技术来提高北斗导航系统的市场竞争力。
[1]王建,余代俊,戴继红.GPS/GLONASS组合定位及其在变形监测中的应用[J].工程勘察,2014(2):78-81.
[2]Hitachiglobalstoragetechnologies-HDDtechnologyoverviewcharts[R].Hitachi,2014.
[3]PATTERSONDA,GIBSONG,KATZRH.ACaseforRedundantArraysofInexpensiveDisks(RAID)[J].SIGMODRECORD,2011,17(3):108-121.
[4]DENGYH.DeconstructingNetworkAttachedStoragesystems[J].JournalofNetworkandComputerApplications,2009,32(5):1064-1072.
[5]CACHINC,KEIDARI,SHRAERA.Trustingthecloud[J].AcmSigactNews,2009,40(2):81-86.
[6]DENGYH.RISC:Aresilientinterconnectionnetworkforscalableclusterstoragesystems[J].JournalofSystemsArchitecture,2008,54(1-2):70-80.
[7]LOUX,KaiH.CollusivepiracypreventioninP2Pcontentdeliverynetworks[J].IEEETransactionsonComputers,2009,58(7):970-983.ResearchandDesignofShortMessageTransceiverChannelSystemBasedonBeidouNavigation
(责任编辑魏静敏校对佟金锴)
LUBiao,YANGXiao-ying,LIYue,
(CollegeofInformationEngineering,SuzhouUniversity,Suzhou234000,AnhuiProvince)
GPSandGLONASSarethemostwidelyutilizednavigationsystems.ItishelpfultoenhancethemarketcompetitivenessoftheBeidounavigationsystembyimprovingitsworkingefficiencyofthedigitalsignalsendingandreceivingchannel.BasedonthediscussionoftheworkingprincipleandprocessoftheBeidounavigationsignaltransceiver,theBeidounavigationshortmessagesendingandreceivingchannelsystemisdesigned.ThecoretechnologyoftheBeidounavigationshortmessagesendingandreceivingchannelsystemisthedesignofthreemodulesincludingENC28J60codinganddecodingmodule,SFM953DEQRFdatacollectionmoduleandtheA/Ddataconversionmodule.ItiscrucialtoimprovetheworkingefficiencyandnavigationprecisionoftheBeidounavigationsystemwiththedesignofreasonableshortmessagesendingandreceivingchannelsystem.
BeidouNavigationSystem;ENC28J60module;SFM953DEQRFmodule;A/Ddataconversionmodule
2016-03-26
2016安徽高校自然科学研究重点项目(KJ2016A777); 2015年安徽省大学生创新创业项目(201510379098); 2014年省级质量工程教学研究重点项目(2014jyxm380)
卢彪(1985-),男,安徽亳州人,助教,硕士。
10.13888/j.cnki.jsie(ns).2016.03.015
TP393
A
1673-1603(2016)03-0262-05
