信控交叉口非机动车待行特性
2016-11-02王涛覃国峰杨岸磊裴星朋杨德胜
王涛,覃国峰,杨岸磊,裴星朋,杨德胜
(1.桂林电子科技大学建筑与交通工程学院,广西桂林 541004;2.东南大学交通学院,江苏南京 210096)
信控交叉口非机动车待行特性
王涛1,2,覃国峰1,杨岸磊1,裴星朋1,杨德胜1
(1.桂林电子科技大学建筑与交通工程学院,广西桂林541004;2.东南大学交通学院,江苏南京210096)
基于实地观测,分析信控交叉口非机动车待行行为特性和影响因素,建立停车线提前和BOX(在人行道前方设置非机动车待行区域,设置非机动车和机动车双停车线的形式)2种交叉口待行方式下非机动车待行位置的预测模型。结果显示:BOX待行方式下非机动车骑行者的趋前性更加明显、更容易出现待行违章行为,停车线提前方式下非机动车更容易发生信号违章;先放左转再放直行的信号相位顺序使非机动车更容易出现违章行为,过街宽度对待行位置分布有显著影响,不同待行位置的非机动车违章率差异明显;在停车线提前待行方式下,左侧直行的机动车流量与等待区内停车数量负相关,对向直行的机动车流量与等待区内停车数量正相关;在BOX待行方式下,对向左转的机动车流量与等待区内侧停车数量正相关。
信号交叉口;非机动车;待行位置;停车线提前;BOX
非机动车是城市交通的重要组成部分,在我国城市交通系统中发挥着不可替代的作用[1]。自行车灵活方便、占道面积小、无污染、节省能源,给交通出行带来了极大方便。电动自行车比自行车省力、快捷、比机动车方便、经济,越来越受到人们的欢迎[2]。但非机动车数量庞大且难于管理的特点成为引起城市交通秩序混乱的重要原因,同时在道路设计和建设时对非机动车考虑不充分,造成非机动车待行空间不足、待行混乱,进一步加剧了城市道路交叉口秩序的混乱,降低了交叉口的通行效率。
文献[3]对BOX交叉口设置自行车待行区域的实用性进行分析。文献[4]对BOX交叉口设置自行车待行区域前后的自行车待行行为特性进行对比,表明设置BOX待行区域后自行车的待行位置更加规范。近几年针对信号交叉口非机动车待行位置不规范的问题,桂林市对大量的交叉口非机动车待行区域进行了优化设计[5],其中最主要的待行方式为停车线提前[6]和BOX 2种交叉口待行方式。本文基于对桂林市区5个信控交叉口非机动车待行行为的观测,对停车线提前和BOX 2种交叉口待行方式下非机动车的待行特性以及影响因素进行研究。
1 交叉口待行方式
1)BOX
BOX交叉口待行方式如图1所示。BOX待行方式是在人行道前方设置非机动车待行区域,设置非机动车和机动车双停车线的形式。这种待行方式是为了达到让非机动车优先于机动车先行的目的。非机动车待行区域位于交叉口人行横道前,主要适用于左转机动车流量比较小的平面交叉口。
2)停车线提前
停车线提前交叉口待行方式如图2所示,在信号交叉口,由于非机动车的起动比机动车快,短时间能越过交叉口,故将非机动车停车线划在机动车停车线之前。这种待行方式下,在信号灯由红灯变为绿灯时,非机动车提前于机动车优先驶入交叉口,避免绿灯初期因非机动车驶出停车线而引起的非机动车与机动车之间的冲突与干扰。非机动车停车线提前为非机动车骑行者提供了更加良好的视距,同时避免了非机动车在机动车尾气环境下停车待行。
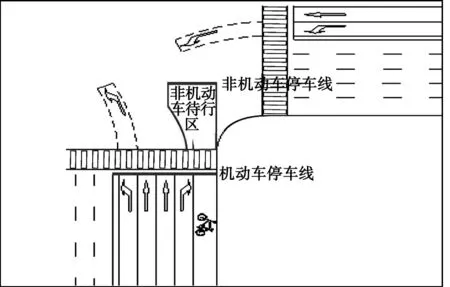
图1 BOX的待行方式示意图
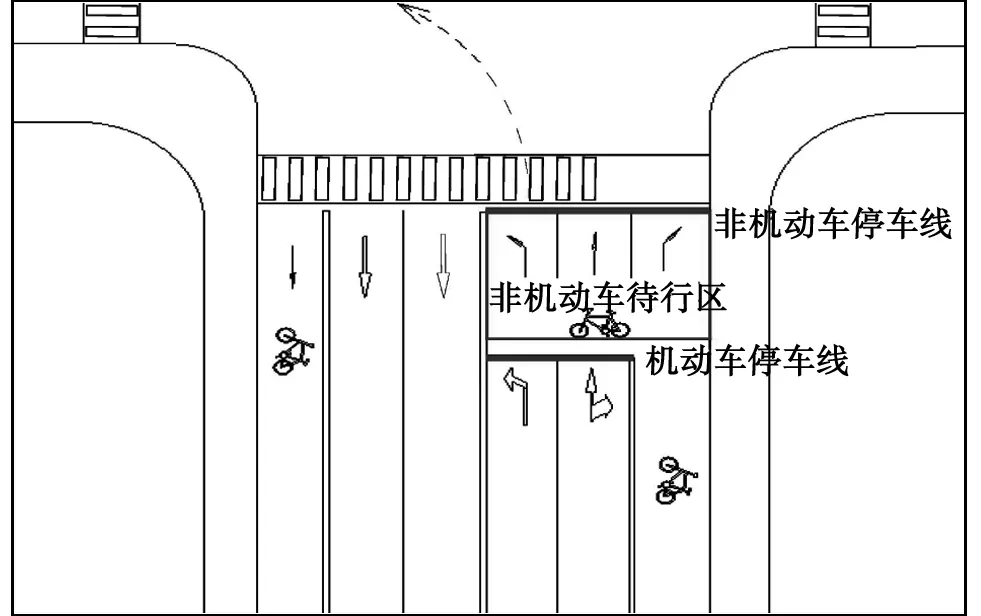
图2 停车线提前的待行方式示意图
本文针对BOX和停车线提前2种交叉口待行方式,以桂林市部分典型交叉口为例,进行实地交通调查、观测,分析非机动车待行方式特性及其待行位置的影响因素。
2 典型交叉口实地观测
选取桂林市具有代表性的交叉口,交叉口基本情况如表1所示。采用人工调查法和视频调查法[7-8],在8:00—8:30、10:00—10:30、15:00—15:30、17:00—17:30 4个高峰、平峰时段,对选取的交叉口道路条件、交通环境、非机动车待行行为等内容进行了调查、观测,交叉口如表2所示。
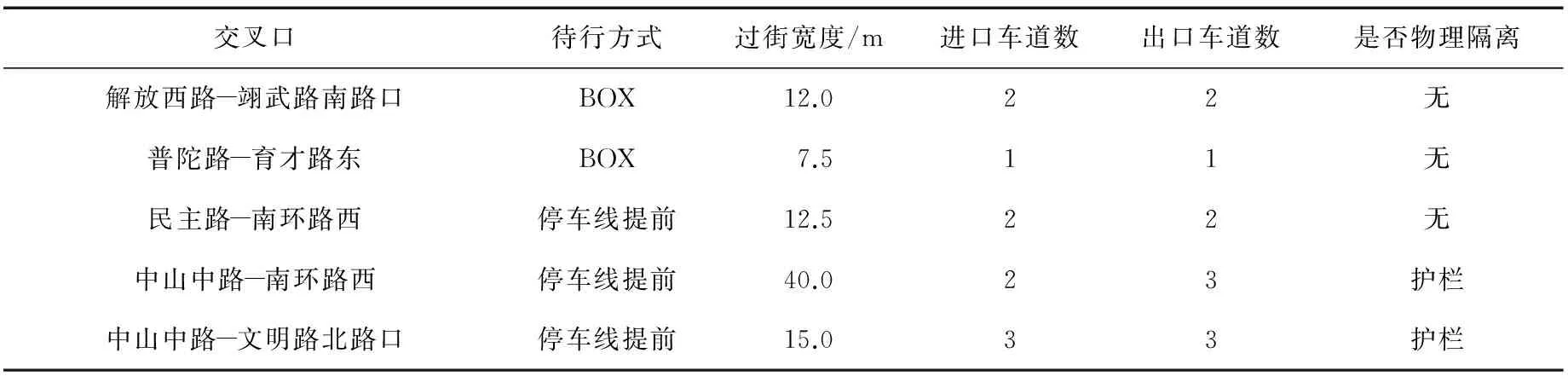
表1 交叉口基本情况
根据视频观察的交叉路口,每15 min统计1次,共获取48组待行行为数据、8 188个非机动车个体行为样本,其中有466个非机动车违章样本。
3 非机动车待行行为特性
1)非机动车待行位置分布特性
表3为调查得到的2种待行方式下非机动车待行位置分布率差异性的独立样本t检验结果(t为检验统计量,P为抽样误差概率)。由表3可知,两种待行方式下非机动车待行位置分布率有显著差异(P<0.05则表示在95%置信度下样本有显著差异)。停车线提前待行方式下非机动车在等待区内的分布率比例为70.4%,显著高于BOX方式下的待行区的分布率38.4%。而在BOX待行方式下,非机动车在等待区前的待行分布率为40.9%,高于停车线提前方式下的待行分布率10.0%,表明在停车线提前的待行方式下,非机动车在等待区前待行的分布率较低,即停车线提前的待行方式对阻止骑行者不合理停车的约束作用强[9],而BOX待行方式下非机动车骑行者的趋前性更加明显。

表2 观测内容汇总

表3 非机动车待行位置分布概率差异性检验
2)非机动车待行位置违章特性
非机动车在2种待行方式的待行位置违章率差异性的独立样本t检验结果如表4所示。由表4可知,在停车线提前待行方式下,非机动车待行位置的违章率为29.6%,而在BOX待行方式下非机动车待行位置违章率为61.6%,2种待行方式下的待行位置违章率存在显著的差异(t=31.732,P<0.001),说明非机动车在BOX待行方式下更容易出现待行违章行为[10]。

表4 2种待行方式的非机动车待行位置违章率差异性检验
3)非机动车待行方式信号违章特性
非机动车在2种待行方式的信号违章率差异性的独立样本t检验结果如表5所示。由表5可知,在停车线提前的待行方式下,非机动车平均信号违章率为14.84%,在BOX待行方式下非机动车平均信号违章率为10.05%,停车线提前方式下非机动车信号违章率是BOX待行方式下的1.5倍,说明在停车线提前方式下非机动车更容易发生信号违章[11]。

表5 2种待行方式的非机动车信号违章率差异性检验
以停车线提前的待行方式为例,对非机动车在不同待行位置时其信号违章率数据进行单因素方差分析(F为检验统计量)[12],检验结果如表6所示。由表6可知,待行位置位于待行区前和待行区左侧的非机动车更容易违章;不同待行位置非机动车违章率差异明显。

表6 停车线提前待行方式下不同待行位置非机动车信号违章率单因素方差分析
4 非机动车待行行为影响因素分析
1)信号相位顺序对非机动车待行违章的影响
对不同信号相位顺序的非机动车待行违章数据进行相关性分析[13-15],结果如表7所示。由表7可知,检验的F值为3.510,对应的P值为0.046<0.05,信控方式对非机动车待行违章率的影响是显著的,且先放左转再直行的信号相位顺序更容易使非机动车出现违章行为。

表7 信号相位顺序与待行违章率的相关性分析
2)过街宽度对非机动车待行位置的影响
对非机动车待行位置与过街宽度的相关性进行分析,直接对统计样本进行分析得到t、p如表8所示。由表8可知:过街宽度对待行位置有显著影响。过街宽度越大,骑行者急于穿越交叉口的心理越强烈,因此更有可能在待行区前及左侧聚集;过街宽度越小,骑行者有可能在待行区内及右侧聚集。研究发现,非机动车在待行区后的概率与过街宽度的相关性不显著[16](P>0.05)。
3)交通量对待行位置分布的影响
利用线性回归模型,分析非机动车待行位置与交叉口机动车和非机动车流量的关系。线性回归模型侧重于考察变量间的数量变化规律,并通过线性表达式,即线性回归方程,来描述其关系,进一步确定一个或几个变量的变化对另一个变量的影响程度。m个自变量的多元线性回归方程可表示为
式中:y为因变量;xi为自变量;a、b为回归系数[17]。
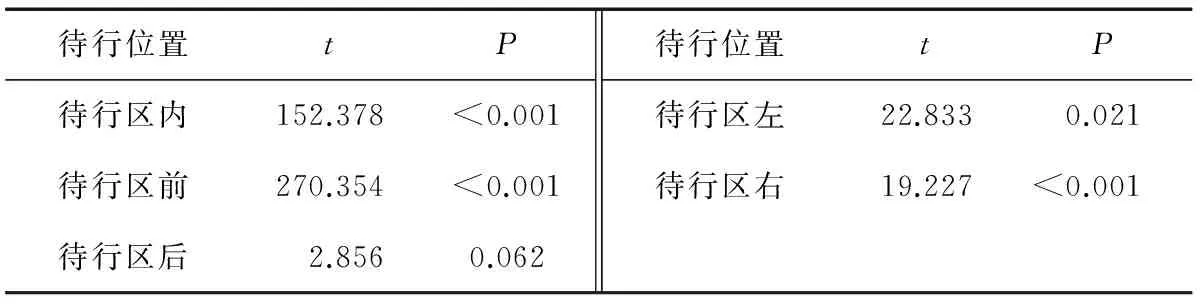
表8 过街宽度与待行位置的相关性分析
针对停车线提前和BOX 2种待行方式,分别建立其待行位置分布的数学模型。定义变量:y1~y5分别为非机动车等待区内、等待区右侧、等待区左侧、等待区前及等待区后停车数量,x0~x9分别为待行非机动车总数、本向直行机动车流量、本向左转机动车流量、本向右转机动车流量、对向直行机动车流量、对向左转机动车流量、右侧直行机动车流量、右侧左转机动车流量、左侧直行机动车流量及左侧左转机动车流量。
利用最小二乘法,采用逐步回归对2种待行方式下非机动车待行位置分布回归模型进行参数标定,并对模型进行整体拟合度检验(R2)、整体显著性检验(P)。经运算预测模型结果如表9、10所示(表10中因BOX待行方式待行区域后方即为机动车,所以数据统计无待行区后)。由表9、10可知:在停车线提前的待行方式下,左侧直行的机动车流量x8与非机动车等待区内停车数量y1负相关,对向直行的机动车流量x4与等待区内停车数x8正相关,即成正比关系;在BOX待行方式下,左侧左转的机动车流量x9与等待区内侧停车数y2正相关。

表9 停车线提前待行方式待行位置分布回归模型
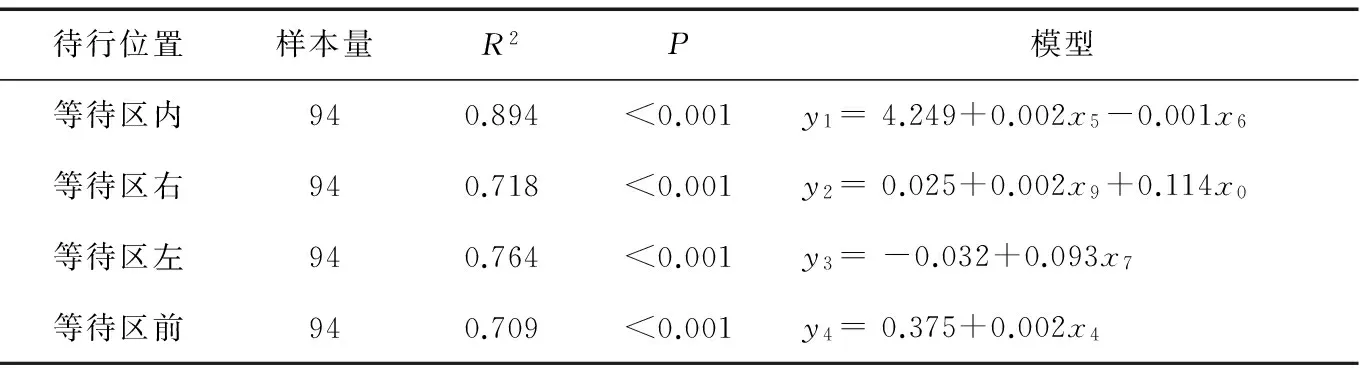
表10 BOX待行方式待行位置分布回归模型
5 结语
1)分析非机动车待行位置分布特性、待行位置违章特性、待行方式信号违章特性,并对信号相位顺序、过街宽度、交叉口机动车和非机动车流量等因素对非机动车待行行为的影响进行研究,研究结果可以为提高交叉口通行效率、改善交通安全环境提供理论参考。
2)本文对非机动车的调查,没有考虑骑行的舒适度、骑行者感知的危险来源、待行区域是否具有合理性等。针对待行位置分布特性的改进建议和措施,缺乏改进的可行性效果评估和仿真。这些都是在后续研究中值得考虑和完善的问题。
[1]陈帅,焦朋朋,杜林.基于非机动车优先的大型交叉口优化研究[J].北京建筑工程学院学报(自然科学版),2013,29(2):21-24.
CHEN Shuai,JIAO Pengpeng,DU Lin.Optimization of the large intersection based on non-motor vehicle priority[J].Journal of Beijing Institute of Civil Engineering and Architecture(Natural Science),2013,29(2):21-24.
[2]潘晓东,赵晓翠,杨轸,等.非机动车骑行行为实验研究[J].长沙理工大学学报(自然科学版),2008,24(4):62-66.
PAN Xiaodong,ZHAO Xiaocui,YANG Zhen,et al.The experimental research on riding behavior of non-motorized vehicle[J].Journal of Changsha University of Science and Technology(Natural Science),2008,24(4):62-66.
[3]MONSERE M C,MCNEIL N,DILL J.Multi-user perspectives on separated, on-street bicycle infrastructure[J].Journal of the Transportation Research Board,2012,2314:22-30.
[4]HOUTEN R V,SEIDERMAN C.How pavement markings influence bicycle and motor vehicle positioning[J].Journal of the Transportation Research Board,2005,1939: 1-14.
[5]单晋,罗崴.交叉口区域非机动车交通冲突分析与对策研究[J].道路交通与安全,2007,7(3):45-51.
SHAN Jin,LUO Wei.A research on analyses of traffic collision and countermeasures of bicycle in crossing area[J].Road Traffic & Safety,2007,7(3):45-51.
[6]王晋生.谈混合交通条件下路口交通工程设计与应用[J].公安学刊-浙江公安高等专科学校学报,2006(10):80-86.
WANG Jinsheng.The design and application of traffic engineering in the intersection under mixed traffic condition[J].Journal of Zhejiang Police College,2006(10):80-86.
[7]贾海亮.电动自行车交通特性研究[D].成都:西南交通大学,2014.
JIA Hailiang.The research on traffic characteristics of electric bicycle[D].Chengdu:Southwest Jiaotong University,2014.
[8]王炜,过秀成.交通工程学[M].南京:东南大学出版社,2000.
[9]王耀东,陈雨人.减少机动车与非机动车冲突的交叉口交通组织方法[J].西安交通大学学报(自然科学版),2015,49(8):109-115.
WANG Yaodong,CHEN Yuren.Traffic organization method at intersection for alleviating traffic conflict between vehicle and non-motor vehicle[J].Journal of Xi′an Jiaotong University(Natural Science),2015,49(8):109-115.
[10]许超,张桐,赵泽宇,等.非机动车越线违停对右转机动车通过率的影响研究[J].地理教学,2011(24):52-55.
XU Chao,ZHANG Tong,ZHAO Zeyu,et al.Research on the influence of non-motor vehicle crossing line back stop on the passing rate of right-turning motor vehicle[J].Geography Teaching,2011(24):52-55.
[11]刘东,韩凤春,陈永胜.灯控路口非机动车交通流运行特性研究[J].中国人民公安大学学报(自然科学版),2004,10(2):89-92.
LIU Dong,HAN Fengchun,CHEN Yongsheng.Research on the operation characteristics of non-motor vehicles traffic flow in the lamp-control intersection[J].Journal of Chinese People′s Public Security University(Natural sciences Edition),2004,10(2):89-92.
[12]杨小勇.方差分析法浅析——单因素的方差分析[J].实验科学与技术,2013,11(1):41-43.
YANG Xiaoyong.Discussion of variance analysis-the single factor variance analysis[J].Experiment Science and Technology,2013,11(1):41-43.
[13]张志远.交叉口非机动车交通流特征分析[J].中原工学院学报,2006,17(6):66-68.
ZHANG Zhiyuan.A research on the administration of non-motor vehicles at intersections[J].Journal of Zhongyuan University of Technology,2006,17(6):66-68.
[14]徐良杰,王炜,俞斌.信号交叉口非机动车及行人交通控制研究[J].交通运输工程与信息学报,2004,2(2):102-108,114.
XU Liangjie,WANG Wei,YU Bin.Study on the control of the non-mobile and the pedestrian at signalized intersection[J].Journal of Transportation Engineering and Information,2004,2(2):102-108,114.
[15]于建英,何旭宏.数据统计分析与SPSS应用[M].北京:人民邮电出版社,2003.
[16]孙明正,杨晓光.机非混行平面交叉口交通设计理论研究[J].公路交通科技,2004,21(8):82-86.
SUN Mingzheng,YANG Xiaoguang.Research on the theory of traffic design for intersection of mixed traffic[J].Journal of Highway and Transportation Research and Development,2004,21(8):82-86.
[17]田兵.多元线性回归分析及其实际应用[J].阴山学刊(自然科学版),2011,25(1):16-19.
TIAN Bing.Multiple iinear regression analysis and its application[J].Yinshan Academic Journal(Natural Science),2011,25(1):16-19.
(责任编辑:杨秀红)
The Characteristics of Non-Motorized Vehicle in the Signal Intersection
WANGTao1,2,QINGuofeng1,YANGAnlei1,PEIXingpeng1,YANGDesheng
(1.SchoolofArchitectureandTranspertationEngineering,GuilinUniversityofElectronicTechnology,Guilin541004,China; 2.SchoolofTransportation,SoutheastUniversity,Nanjing210096,China)
The characteristics and influential factors of the waiting behaviors of the non-motorized vehicle in the signalized intersection based on the real observations is analyzed. Then the prediction model of the waiting area of the non-motorized vehicle in the two waiting modes of the intersection, the advanced stop line and BOX (that is, setting up the waiting area of the non-motorized vehicle in front of the sideroad, the double stop lines of the non-motorized vehicle and the vehicle) is established. The results show that in the BOX waiting mode, the non-motorized riders are more obvious and easier to go ahead and violate the waiting rules while in the advanced waiting mode,and the non-motorized vehicles are easier to be against the signal rules; the phase sequence of left-turn first and going straight makes the non-motorized vehicles easily violating the traffic rules; the distribution of the street width also has the obvious influence on the waiting area that there are the clear differences of breaking the traffic rules in the different waiting areas; in the advanced stop line mode the flow of vehicles going straight on the left is negatively correlated with the number of vehicles stopping in the waiting area, and the opposite flow of vehicles going straight is positively correlated with the number of vehicles stopping in the waiting area; and finally in the BOX waiting mode, the flow of overcoming vehicles turing left is positively correlated with the number of inward vehicles stopping in the waiting area.
signal intersection; non-motorized vehicle; waiting areas; advanced stop line;BOX
2016-04-12
国家自然科学基金项目(51408145);广西省自然科学基金项目(2014GXNSFBA118255);国家级大学生创新训练项目(20140595037)
王涛(1985—),男,江苏徐州人,桂林电子科技大学讲师,东南大学博士研究生,主要研究方向为交通安全、城市交通规划,E-mail:117564480@qq.com.
10.3969/j.issn.1672-0032.2016.03.线西直门站站台客流仿真007
U491
A
1672-0032(2016)03-0036-07