基于多工况匹配的商用车侧翻预警方法
2016-11-02陈可际过学迅裴晓飞
陈可际 过学迅 裴晓飞
武汉理工大学,武汉,430070
基于多工况匹配的商用车侧翻预警方法
陈可际过学迅裴晓飞
武汉理工大学,武汉,430070
提出了一种MTTR(matched time-to-rollover)侧翻预警方法,该方法的关键是如何实时准确地获得车辆侧倾角和侧倾角速度。为此,利用卡尔曼滤波来估计侧倾角速度;同时,提出了三种侧倾角估计方法,以适应不同的侧翻工况,并且利用模糊推理完成工况匹配。基于以上方案,以J转向、鱼钩、双移线工况作为典型的车辆侧翻工况,在TruckSim/Simulink软件中进行了联合仿真。结果表明,MTTR侧翻预警方法能够更为直接、准确地反映车辆距离侧倾发生所剩余的时间,具有更好的预警效果。
车辆工程;侧翻预警;联合仿真;侧倾角估计;模糊推理
0 引言
侧翻事故的发生受到多种因素的同时影响,如驾驶员操作、车辆状态以及道路情况等。根据美国国家公路交通安全管理局(NHTSA)数据统计,车辆侧翻的发生率约为5%,但是事故所造成的死亡率高达30%[1]。侧翻事故又分为绊倒型侧翻和非绊倒型侧翻两种类型,前者是由于车辆侧向移动中与障碍物接触、碰撞所致,后者的原因是车辆横向加速度超过一定阈值,使得一侧车辆的垂向力突然减小甚至为零。客车、货车等质心较高的商用车,在急速转弯、紧急避障以及加速超车等工况下,相对于乘用车而言,更容易发生非绊倒型侧翻事故。由于J转向(J-turn)工况、鱼钩(fishhook)工况和双移线(DLC)工况能够涵盖车辆在非绊倒型侧翻工况下的大部分状态,故本文主要以这三种工况作为研究对象。
目前,如何解决车辆侧翻问题是国内外学者研究的热点。张不扬等[2]对车辆侧翻的研究现状和关键技术进行了综述,认为侧翻指标的选取对预警效果影响很大。于志新等[3]提出了实时TTR侧翻预警算法,并用LQR控制策略来降低侧翻风险,但是没有考虑不同工况的差异。金智林等[4]提出了SUV侧翻预警算法,但模型算法复杂,实时性较差。文献[5-6]结合Kalman滤波算法对TTR算法进行了改进,但所有状态量仅靠滤波估计获取,使得预警算法的误差较大。陈毅华等[7]提出了更简洁的TTR算法,但是在数据获取和参数估计上有所欠缺。鲍卫宁等[8]在车辆侧翻仿真中考虑了路面激励的影响。徐中明等[9]在ABS的基础上利用差动制动来进行侧翻仿真。王健等[10]考虑了轮胎的非线性特性,利用滑模观测和模糊推理提出了侧翻预警算法,但其侧翻评价指标过于抽象。文献[11-13]建立了结合道路识别的车辆防侧翻系统。Lundahl等[14]分析了货车不同侧翻指标之间的关系。
本文在TTR侧翻预警原理的基础上,结合卡尔曼滤波和多工况匹配算法,提出针对商用车的MTTR侧翻预警算法。由于此算法的关键是对车辆侧倾角的估计,因此首先提出了三种侧倾角的估计方法,并在车辆典型侧翻工况下找到各自的适用性,同时利用模糊推理找到车辆当前的工况,最终实现预警算法对典型侧翻工况的匹配,提高预警的准确性。
1 TTR预警算法
早期的研究认为,横向载荷转移率(lateral load transfer ratio,LTR)最能反映车辆的侧倾状态[2],当LTR值为1时,说明车辆所有载荷完全由某一侧车轮承受,另一侧车轮即将离地,若不对车辆进行适当干预,将发生侧翻事故。但是,实际情况下LTR值难以准确获取,而且不具备提前预警的效果,因此,TTR(time-to-rollover)等其他侧翻指标被相继提出。
TTR的概念最先由Chen等[15]提出,即车辆从当前状态到侧翻的时间,实际上也是到某侧车辆离地所需要的时间。文献[3-6]所提出的TTR算法是一定运算步长Ts的叠加,若n个运算步长之后侧翻指标超过阈值,则TTR取nTs,由于需要运算多个步长,不仅对硬件要求较高,而且实时性较差。文献[7]所提出的基于车辆侧倾角变化的TTR算法,虽然计算参数少,但没有明确给出侧倾阈值的计算式。而本文所提出的基于车辆侧倾角变化的TTR算法,考虑了载荷转移率和侧倾角的关系,避免了复杂数学方程的多步运算,能够连续地、实时地计算出TTR值。计算公式如下:
(1)
(2)
(3)

车型选用TruckSim中的TourBus,仿真结果如图1和图2所示。在仿真环境下,结合软件输出的LTR值来分析式(1)~式(3)计算得到的TTR曲线,说明TTR预警方法的准确性与实时性。

图1 J转向工况LTR曲线

图2 J转向工况TTR曲线
由图1可知,车辆在J转向工况下持续向左侧转向,直到2.1s左右RLT=1,车辆即将发生侧翻,而图2的TTR曲线显示,2.1s左右TTR=0,车辆左侧车轮离地,与图1情况一致。取图2曲线上的极小值点为代表分析TTR曲线的准确性,0.6s左右时TTR约0.5s,此时按图1所示的LTR上升趋势,经过0.5s左右RLT=1;同理,图2中1.3s左右的TTR为0.9s,此时RLT距离1还有大约0.9s的时间。本文设定当TTR<2s时进行报警,结合图1和图2可知,车辆从0.25s开始转向到2.1s即将侧翻,共有1.8s的持续报警时间,足以提醒驾驶员从而避免发生侧翻事故,具有良好的预警效果。
2 侧倾角速度估计方法
本文利用卡尔曼滤波(Kalmanfilter)原理来估计侧倾角速度。卡尔曼滤波算法不仅能够滤除外界白噪声干扰,而且有估计预测的功能,其工作原理如图3所示。

图3 卡尔曼滤波算法步骤
状态预测方程中的系数矩阵A、B来自车辆侧倾动力学模型,所以所建立的数学模型的精度很大程度上影响了滤波效果。下面以线性二自由度模型为基础,结合侧倾动力学的耦合,建立三自由度侧倾动力学模型。
该模型忽略转向系统的影响;不考虑地面激励;忽略非悬挂质量的侧倾;忽略轮胎力学的非线性特性;忽略车辆载荷的变动。另外,作以下假设:车辆保持匀速前进;侧倾轴线平行于x轴;前轮转角很小;车辆质心侧偏角和轮胎侧偏角变动范围小;车辆关于x轴对称。车辆侧倾动力学简化模型如图4所示。

图4 车辆侧倾动力学简化模型
该模型以质心侧偏角β和横摆角速度ψ为状态变量来反映车辆的横向动力学特性。前后轴的横向力分别用Fy1和Fy2表示,作为轮胎侧偏角的线性函数:
(4)
式中,C1、C2分别为前后轮胎侧偏刚度;α1、α2分别为前后轮胎侧偏角。
当轮胎侧偏角较小时,满足以下数学关系:
(5)
式中,vx为车辆沿x轴方向速度;l1、l2分别为质心到前后轴的距离;δ为前轮转角。
根据之前的假设,车辆的质心侧偏角β满足以下数学关系:
(6)
式中,vy为车辆沿y轴方向速度。
结合牛顿第二定律,绕z轴转动的横摆力矩平衡方程为
(7)
式中,Iz为绕z轴的转动惯量。
沿y轴的侧向运动力的平衡方程为
(8)
式中,m为空载整车质量;ms为空载簧上质量;ay为车辆侧向加速度;h为空载侧倾半径。
绕x轴转动的侧倾力矩平衡方程为
(9)
式中,Ix为绕x轴的转动惯量;c为悬架系统的侧倾阻尼系数;g≈9.8 m/s2。
在小角度情况下,三角函数可做线性近似处理:cosδ=1,cosφ=1,sinφ=φ。
结合上文建立的动力学模型,解耦可以得到状态空间方程:

(10)
式中,x为状态变量;u为控制变量。
由此可以得到状态预测方程。令观测方程为
(11)
下面以双移线工况为例,在加入了白噪声的仿真环境下验证卡尔曼滤波效果,结果如图5所示。结果表明,卡尔曼滤波曲线不仅滤除了白噪声的干扰,而且具有良好的跟随性,这也间接说明了所建立的侧倾动力学模型具有一定的精度。

图5 双移线工况卡尔曼滤波效果
3 侧倾角估计方法及工况匹配
本节研究车辆侧倾角的估计方法,考虑到单一方法对不同工况的适应性有限,提出三种有效的方法来估计车辆侧倾角。用TruckSim/Simulink联合仿真来比较各方法在不同工况下的表现,从而为每种工况匹配最佳的侧倾角估计方法。
3.1侧倾角估计方法
3.1.1横摆角速度估计法
(12)
由式(12)可知,在给定的车辆模型下,车辆侧倾角φ是关于横摆角速度ψ的一次函数,所以输入仅为车辆横摆角速度,易于实现,同时也体现了一定的横摆特性。
3.1.2侧倾角速度估计法
3.1.3悬架位移估计法
利用位移传感器,如磁致伸缩位移传感器,可以测得各个悬架的垂向变形量,从而通过几何关系式来实现车辆侧倾角的估计。侧倾角较小时,数学关系如下:
(13)
式中,下标lf、rf、lr、rr分别表示左前、右前、左后、右后;ΔZlf、ΔZrf、ΔZlr、ΔZrr分别为对应悬架的垂向变形量;B′为左右悬架中心距。
该算法的优点在于不受汽车参数变化的影响,而且包含了道路因素的作用,缺点在于当侧倾角较大时存在低估的可能。
3.2工况匹配
3.2.1J转向工况
仿真条件设置如下:①仿真步长t′=0.001 s;②车辆纵向速度vx=40 km/h;③转向盘转角输入为180°角阶跃输入。仿真结果如图6所示。
1982年,中共中央指出包产到户,包干到户等各种责任制都是社会主义集体经济的生产责任制。那时汤家湾所有的社员都集中在一起分土地,每人都分到了一亩三分地,奶奶拿着红红的土地承包证,看了又看,证上写着家里分到了六亩五分地,这让奶奶脸上的笑容久久不散。勤劳的爷爷奶奶用心耕耘自家承包的土地,面朝黄土背朝天是他们经常的状态,但是这样的劳累之后,是秋天田间漂浮的稻香,是孩子吃饱饭后开心的笑容,是越来越好的生活。

图6 J转向工况侧倾角估计结果
从仿真结果中可以看出:基于侧倾角速度估计法虽然在刚开始有良好的跟随效果,但是到了峰值之后,有明显的发散;基于横摆角速度估计法趋势与真实值大致相同,但是整体有明显的偏大;而基于悬架位移估计法在整个过程中都与实际值偏差不大,而且随着时间的推移偏差越来越小。所以,在J转向工况下基于悬架位移的估计方法效果最好。
3.2.2鱼钩工况
仿真条件设置如下:①仿真步长t′=0.001 s;②车辆纵向速度vx=40 km/h;③转向盘转角输入为TruckSim软件默认输入。仿真结果如图7所示。
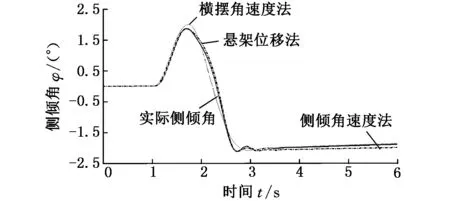
图7 鱼钩工况侧倾角估计结果
从仿真结果中可以看出:侧倾角速度法和悬架位移法虽然在前半段有良好的跟随效果,但在后半段逐渐偏离实际值;而横摆角速度法越往后跟随性越好,虽然前半段与真实值稍有偏差,但是其结果波动小,曲线光滑平整,数据便于处理。因此,在鱼钩工况下适用横摆角速度估计法。
3.2.3双移线工况
仿真条件设置如下:①仿真步长t′=0.001 s;②车辆纵向速度vx=70 km/h;③转向盘操作为TruckSim软件默认状态。仿真结果如图8所示。

图8 双移线工况侧倾角估计结果
由仿真结果可以看出:除了基于横摆角速度法明显偏大以外,其他两种方法都与真实值差别不大,特别是对侧倾角速度积分的方法,其结果与真实值十分吻合。所以,在双移线工况下显然是基于侧倾角速度的估计法最佳。
综上所述,三种典型的侧翻工况所对应的最佳侧倾角估计方法见表1。

表1 侧倾角估计方法匹配
3.3工况识别
在为不同工况匹配了最佳侧倾角估计算法之后,本节设计模糊推理算法来识别车辆的工况状态,以便切换到相应的侧倾角估计方法中,实现多工况的匹配。该模糊算法的输入为转向盘转角与转向盘转动角速度,输出为侧翻工况类型的识别指数。利用MATLAB中的模糊推理工具箱建立输入和输出的隶属度函数,采用Mamdani匹配推理规则形成可视化的输出特征曲面。隶属度函数以及输出特征曲面如图9~图12所示。

图9 转向盘转角隶属度函数
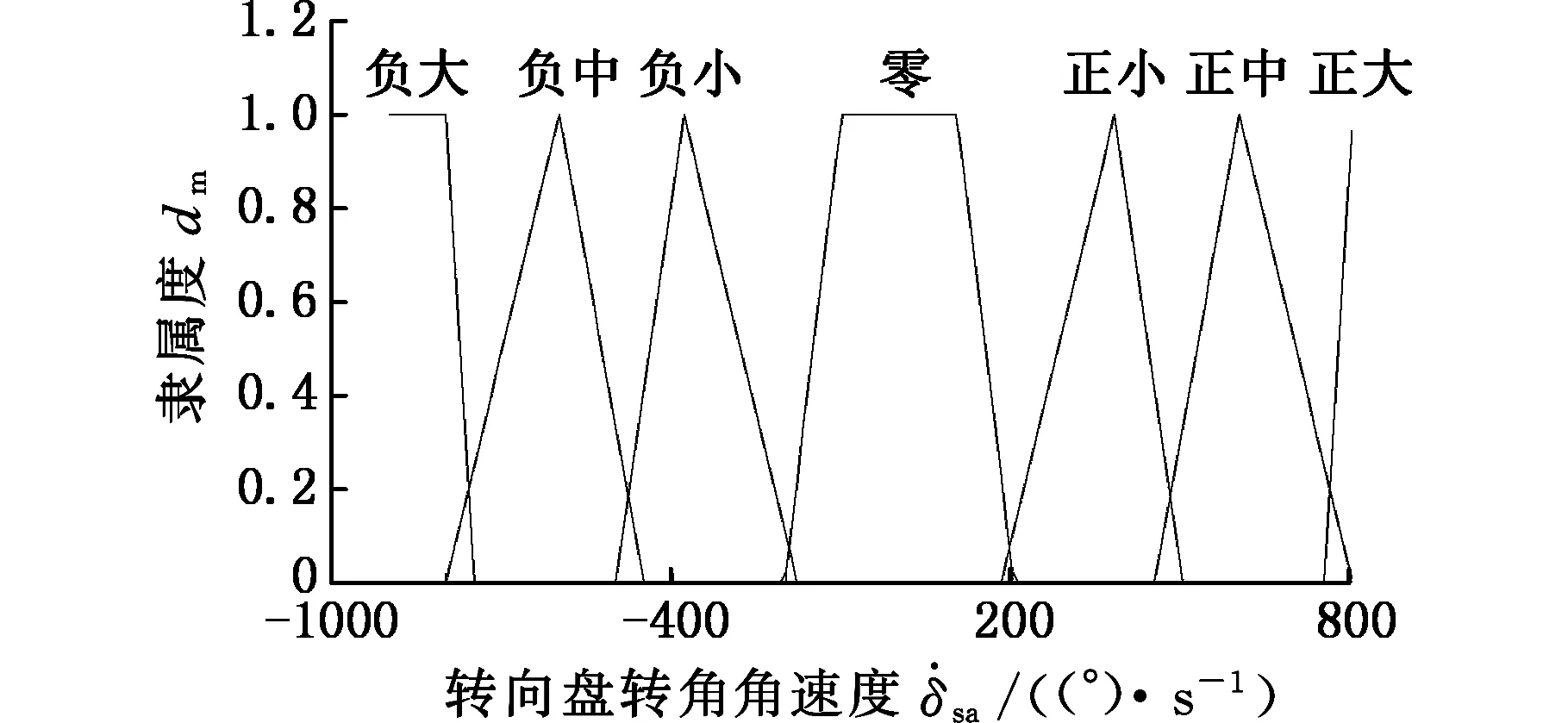
图10 转向盘转角角速度隶属度函数

图11 工况识别指数隶属度函数

图12 输出特征曲面
由图11所示的隶属度函数可知,识别指数1、2、3分别对应J转向、鱼钩和双移线工况。通过联合仿真,对所建立的工况模糊识别方法的准确性进行验证,所得结果如图13所示。

图13 工况识别结果
工况识别的仿真结果表明,在各个工况下,该模糊识别方法能快速准确地得出相应的识别指数。J转向和鱼钩工况在一开始的识别指数为3,是因为在1s以前转向盘转角较小,类似双移线工况,之后的工况特征能够明显地被模糊算法所识别。计算机在收到工况识别指令之后,就可以选择相应的最佳估计方法进行运算,从而减小了侧倾角估计的误差。
4 结论与展望
本文针对商用车所提出的MTTR预警方法简单实用,能够实时地反映车辆从当前状态到即将侧翻的时间,并且卡尔曼滤波算法和多工况匹配的应用可以使其中的关键数据更加精确。为三种典型工况选取了最佳侧倾角估计算法,即J转向工况对应基于悬架位移的估计方法,鱼钩工况对应横摆角速度估计方法,双移线工况对应侧倾角速度估计方法。同时,利用模糊逻辑推理能够较好地识别出车辆当前所处的侧倾工况。在后续研究中,可以将绊倒型侧翻和载荷变动考虑进来,增加预警方法的适用范围;在准确预警的基础上可以增加控制部分,例如结合制动系统、转向系统、悬架系统等的控制,对车辆的侧倾姿态进行主动的调整,避免人为操作的失误。
[1]NationalHighwayTrafficSafetyAdministration(NHTSA).NationalAutomotiveSamplingSystem[EB/OL].[ 2015-12-11]http://www.nhtsa.gov/NASS.
[2]张不扬,王德平,宗长富.车辆侧翻预警研究现状与关键技术[J].汽车技术,2010(8):27-30.
ZhangBuyang,WangDeping,ZongChangfu.StatusofResearchandKeyTechnologyofVehicleRolloverWarningSystem[J].AutomobileTechnology,2010(8):27-30.
[3]于志新,宗长富,何磊,等.基于TTR预警的重型车辆防侧翻控制算法[J].吉林大学学报(工学版),2009,39(增2):251-254.
YuZhixin,ZongChangfu,HeLei,etal.AlgorithmsofAnti-rolloverControlforHeavyVehicleBasedonTTRWarning[J].JournalofJilinUniversity(EngineeringandTechnologyEdition),2009,39(S2):251-254.
[4]金智林,张鸿生,马翠贞.运动型多功能汽车动态侧翻预警系统研究[J].传感器与微系统,2012,31(9):32-35.
JinZhilin,ZhangHongsheng,MaCuizhen.ResearchonDynamicRolloverWarningSystemforSUV[J].TransducerandMirosystemTechnology.2012,31(9):32-35.
[5]朱天军,吴炳胜,孙振军,等.基于改进TTR算法的重型车辆侧翻预警系统[J].机械工程学报,2011,47(10):88-93.
ZhuTianjun,WuBingsheng,SunZhenjun,etal.RolloverWarningSystemofHeavyDutyVehicleBasedonImprovedTTRAlgorithm[J].JournalofMechanicalEngieering,2011,47(10):88-93.
[6]和好,孙涛,王岩松. 重型车辆侧翻预警算法研究[J].计算机工程与应用,2013,49(24):256-261.
HeHao,SunTao,WangYansong.RolloverWarningAlgorithmforHeavyVehicle[J].ComputerEngineeringandApplications,2013,49(24):256-261.
[7]陈毅华,毛建国,徐健康,等.基于TTR的汽车侧翻预警研究[J].重庆理工大学学报(自然科学),2014,28(7):11-14.
ChenYihua,MaoJianguo,XuJiankang,etal.VehicleRolloverWarningBasedonTTR[J].JournalofChongqingUniversityofTechnology(NaturalScience),2014,28(7):11-14.
[8]鲍卫宁,胡三宝. 考虑路面激励的车辆侧翻仿真分析[J].农业工程学报,2015,31(2):59-65.
BaoWeining,HuSanbao.VehicleRolloverSimulationAnalysisConsideringRoadExcitation[J].TransactionsoftheChineseSocietyofAgriculturalEngineering,2015,31(2):59-65.
[9]徐中明,贺岩松,于海兴,等.SUV车辆差动制动防侧翻控制研究[J].汽车工程,2014,36(5):566-672.
XuZhongming,HeYansong,YuHaixing,etal.AResearchonDifferentialBraking-basedAnti-rolloverControlforSUVs[J].AutomotiveEngineering,2014,36(5):566-672.
[10]王健,余贵珍,张为,等.基于滑模观测和模糊推理的车辆侧翻实时预警技术[J].农业机械学报,2010,41(6):1-6.
WangJian,YuGuizhen,ZhangWei,etal.Real-timeRolloverPredictionforVehicleBaseonPrinciplesofSlidingModeandFuzzyInferenceSystem[J].TransactionsoftheChineseSocietyofAgriculturalEngineering,2010,41(6):1-6.
[11]YaoC,HsuJ,LiaoY,etal.ImplementationofReal-timeVehicleRolloverPreventionSystem[J].SAETechnicalPaper,2014-01-0149.
[12]HamidD,MohammedC,AbdelhamidR,etal.DetectionofImpendingVehicleRolloverwithRoadBankAngleConsiderationUsingaRobustFuzzyObserver[J].InternationalJournalofAutomationandComputing,2015,12(1):93-101.
[13]SittikornL,SeanNB.Terrain-awareRolloverPredictionforGroundVehiclesUsingtheZero-momentPointMethod[C]//AmericanControlConference.Baltimore,2010: 1501-1507.
[14]LundahlK,LeeCF,FriskE,etal.AnalyzingRolloverIndicesforCriticalTruckManeuvers[J].SAEInternationalJournalofCommercialVehicles,2015,8(1):189-196.
[15]ChenBo,PengH.Differential-braking-basedRolloverPreventionforSportUtilityVehicleswithHuman-in-the-loopEvaluations[J].VehicleSystemDynamics,2001,36(4/5):359-389.
(编辑陈勇)
Rollover Warning of Commercial Vehicles Based on Multiple Condition Matching
Chen KejiGuo XuexunPei Xiaofei
Wuhan University of Technology,Wuhan,430070
A MTTR(matched time-to-rollover) rollover warning method was proposed herein. The key of this method was the way to obtain the roll angles and roll rates of the vehicles instantaneously and accurately.For this purpose, Kalman filter algorithm was used to estimate the yaw angle rates, three estimation methods of roll angles of commercial vehicles were suggested to adapt to different rollover conditions, and the fuzzy logic inference was established to complete the identification and matching of the rollover situations. Based on the scheme above, taking J-turn, fishhook and double land condition(DLC) as the typical rollover conditions, the co-simulation of TruckSim/Simulink was made. The results show that this MTTR warning method is able to reflect the remaining time to rollover more directly and accurately, which has better warning effectiveness.
vehicle engineering; rollover warning; co-simulation; estimation of roll angle; fuzzy inference
2015-12-11
国家自然科学基金资助项目(50515354);中央高校基本科研业务费专项资金资助项目(2014-IV-044)
U461.91
10.3969/j.issn.1004-132X.2016.20.022
陈可际,男,1992年生。武汉理工大学汽车工程学院博士研究生。主要研究方向为车辆动力学仿真及其控制。过学迅,男,1956年生。武汉理工大学汽车工程学院教授、博士研究生导师。裴晓飞(通信作者),男,1985年生。武汉理工大学汽车工程学院讲师、博士。
