脚踏式下肢康复训练机器人结构设计及运动学仿真
2016-11-02刘瑞素邢新闯刘亚男叶协通王永敏
刘瑞素 邢新闯 刘亚男 叶协通 王永敏
河北工业大学,天津,300130
脚踏式下肢康复训练机器人结构设计及运动学仿真
刘瑞素邢新闯刘亚男叶协通王永敏
河北工业大学,天津,300130
借助于Pro/E软件建立下肢康复训练机器人的三维模型并设计了可以改变步长运动和进行位姿调整的步态运动机构。通过实验,对下肢康复训练机器人的工作步速范围、负载能力以及下肢关节运动角度进行分析,验证脚踏式下肢康复训练机器人设计的合理性。对设计结构进行了运动学仿真,仿真结果表明该机构能够较好地模拟人的实际步态运动,符合下肢康复系统的整体要求。
下肢康复训练机器人;康复训练;机构模型;运动学仿真
0 引言
人口老龄化以及多种中枢神经相关疾病导致的下肢运动功能障碍的患者人数越来越多,该类患者不能仅仅依赖于药物治疗,合理科学的康复训练在治疗过程中也是必不可少的。在这样的市场背景下,针对康复训练机器的研究也陆续增多,进而逐渐产生了一种新型机器人——下肢康复训练机器人,它是能够有效辅助下肢运动功能障碍患者进行必要的康复训练的自动化装置,有助于患者运动机能的恢复。大量临床医学经验与理论表明,患者病发后的6个月为恢复黄金期,在这段时期除了必要的药物和手术治疗以外,正确、科学的康复训练方法对患者肢体运动功能的恢复有着非常重要的作用[1]。在康复领域,康复训练机器人的出现打破了传统康复器械的垄断局面,提高了产品的技术含量和市场竞争力[2]。为了能够更好地发挥机器人的辅助康复功能,下肢康复训练机器人除了应该具有合理的机械结构之外,还需要具有能够模拟正常人正常步态运动以及调节脚位姿的功能。
国外的下肢康复训练机器人比较典型的是瑞士Hocoma AG研发的Lokomat、德国的LocoHelp、美国的Litegait和Robomedica。这类康复训练机器人一般包括步行矫正器、体重支撑系统(悬挂装置)和步行台,主要用于患者中期和后期的步态康复训练,具有较好的医疗效果,但患者躯干被束缚悬挂,上体活动受限,舒适性差,且价格昂贵[3-4]。目前关于步态运动机构研究的文献中,大部分是针对不同结构形式所产生的主运动性能的分析,很少涉及脚姿调节运动和改变步长的步态运动,因此不能保证运动过程中下肢关节的运动姿态,也不能实现步长的调节[5-6]。
本文介绍的脚踏式下肢康复机器人不但结构简单、成本低廉、经济适用,而且可以实现主运动和脚姿调节运动的相互协调,同时还可以改变步态运动的步长和步高,以满足不同下肢长度患者进行下肢康复训练的要求。
1 机器人的结构及工作原理
在下肢康复训练机器人的设计中,应首先确定康复动作的路径和标准。下肢康复训练机器人的设计目的是帮助下肢功能障碍患者逐渐恢复行走功能[2],通过控制下肢运动关节,使下肢每个关节都能仿照正常人协调运动。针对人体的行走步态进行模拟是模拟正常人下肢运动形式的核心。
该下肢康复机器人的总体结构如图1所示,机器人主要由步态控制机构、坐式辅助机构、外骨骼护罩机构及机身部分组成。控制系统由无刷直流电机、连接链轮以及外部控制器组成,通过无刷直流电机直接驱动机构带动踝关节运动,从而带动患者两条腿运动,实现步态行走模拟运动,以完成下肢康复训练动作。外部控制器选用带有显示屏的单片机。 步态运动包括跨步摆动以及踝关节转动,是由两种运动相互协调实现的,跨步摆动是模拟行走的运动,定义为主运动,与之相协调的踝关节的转动定义为脚姿调节运动。
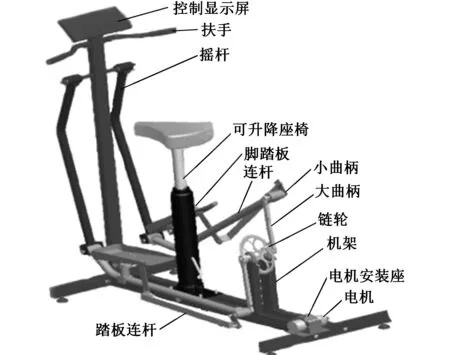
图1 下肢康复训练机器人总体结构
过去,下肢功能障碍患者在电动踏步机上进行康复训练时,必须有护理人员协助才能实现患者腿部和脚部运动的协调。为了避免这样的情况发生,提高康复效率,该脚踏式下肢康复机器人将各个机构协调运动,通过模拟脚的跨步运动和脚部姿态来模拟人的行走状态。其中,主运动由两组曲柄摇杆机构来实现,机构运动过程中这两个曲柄始终保持180°相位差,从而实现两个对侧踏板的协调运动。将两个脚踏板分别固定在两个对侧的连杆上。脚踏板的运动轨迹随连杆的转动实现,曲柄转动一周,连接在连杆上的脚踏板回转中心相应走过一个类似椭圆的轨迹。根据不同下肢长度患者的训练要求选择合适的机构参数,即可按照正常人行走运动轨迹进行模拟训练。
脚姿调节运动由一对随动的曲柄摇杆机构来实现,曲柄为原动件,固定在模拟跨步运动的大曲柄上,直流电机经链传动带动大曲柄运动,从而实现小曲柄的运动。该步态机构不但可以用于模拟人行走时的跨步动作,而且可以调节在步态周期中患者的脚踝运动角度。两侧脚踏板作为连杆机构运动末端件,带动患肢按照类椭圆轨迹进行康复训练。下面分述主要构成构件的主要功能以及相关参数选择原则。
1.1下肢驱动机构
选择由摇杆、脚踏板、连杆、小曲柄构成的四连杆机构进行研究。由下肢驱动模型,建立以曲柄转轴中心为原点的坐标系,如图2所示。

图2 小腿驱动机构
通过闭环机构方程可以得到E点坐标为
(XE,YE)=(L1cosθ1+L5cosθ2,L1sinθ1+L5sinθ2)
E点的坐标方程为椭圆方程参数表达形式,即当θ1在(0,2π)区域内连续变化时,脚踏板所在位置E点形成一个类椭圆的轨迹。通过E点坐标参数表达式可以看出,影响下肢驱动机构踝关节类椭圆轨迹的因素有曲柄长度L1、连杆长度L2、摇杆长度L3、脚踏板到曲柄端点在连杆上的距离L5。运用MATLAB软件探讨改变L1、L2、L3对运动轨迹的影响,见图3~图5。
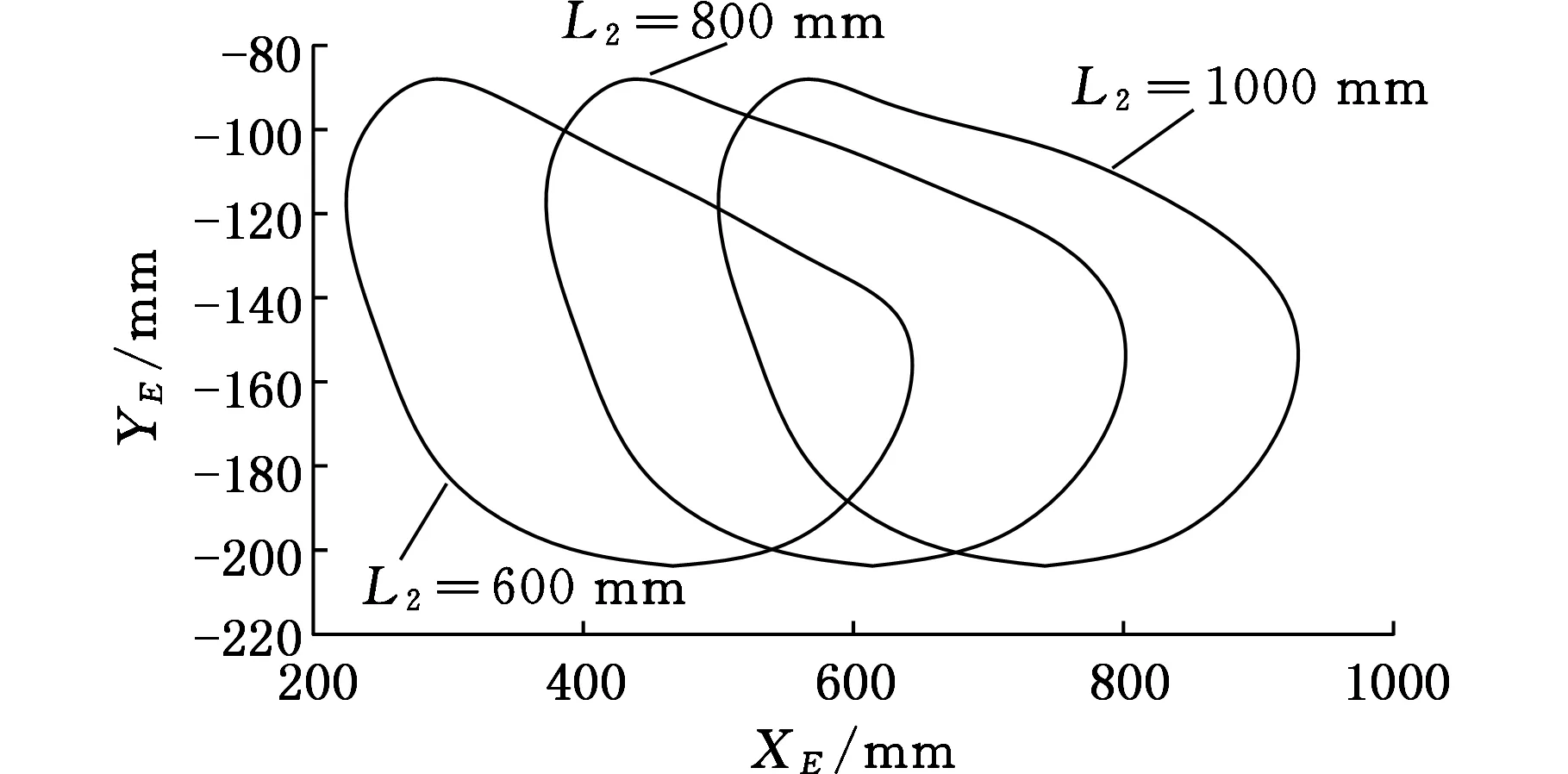
图3 不同连杆长度L2时的类椭圆轨迹
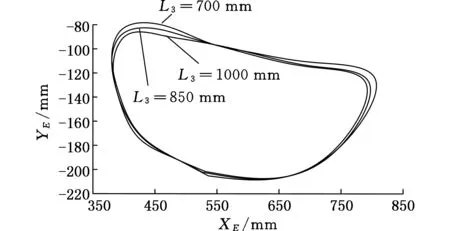
图4 不同摇杆长度L3时的类椭圆轨迹
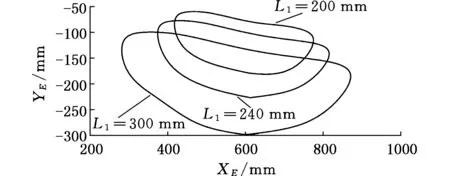
图5 不同曲柄长度L1时的类椭圆轨迹
由图3~图5可以看出,改变连杆长度L2和改变摇杆长度L3对椭圆轨迹曲线的长轴和短轴均没有太大影响,改变曲柄长度L1对运动轨迹的位置及长短轴均有很大影响。因此可以得出结论:调节类椭圆轨迹的长轴和短轴的最佳方式是调节曲柄长度。该脚踏式下肢康复机器人下肢驱动机构如图6所示,主运动由两个并联的相位差为180°的曲柄连杆机构实现。两个曲柄上分别设有不同的限位孔,通过调节连杆与具有不同限位孔的曲柄的连接,能够改变曲柄的有效工作长度,实现步长和步高的调整,从而达到模拟不同下肢长度患者行走的目的,满足不同步长步高患者的使用要求。正常身高的人步长约为50cm,步高约为11cm,此时曲柄长度L1应选为25cm左右,根据不同身高患者的要求,选择不同的曲柄长度进而满足不同患者的训练要求。脚姿调节运动通过一种随动四连杆机构来实现,改变脚踏板角度可实现踝关节角度的变化。
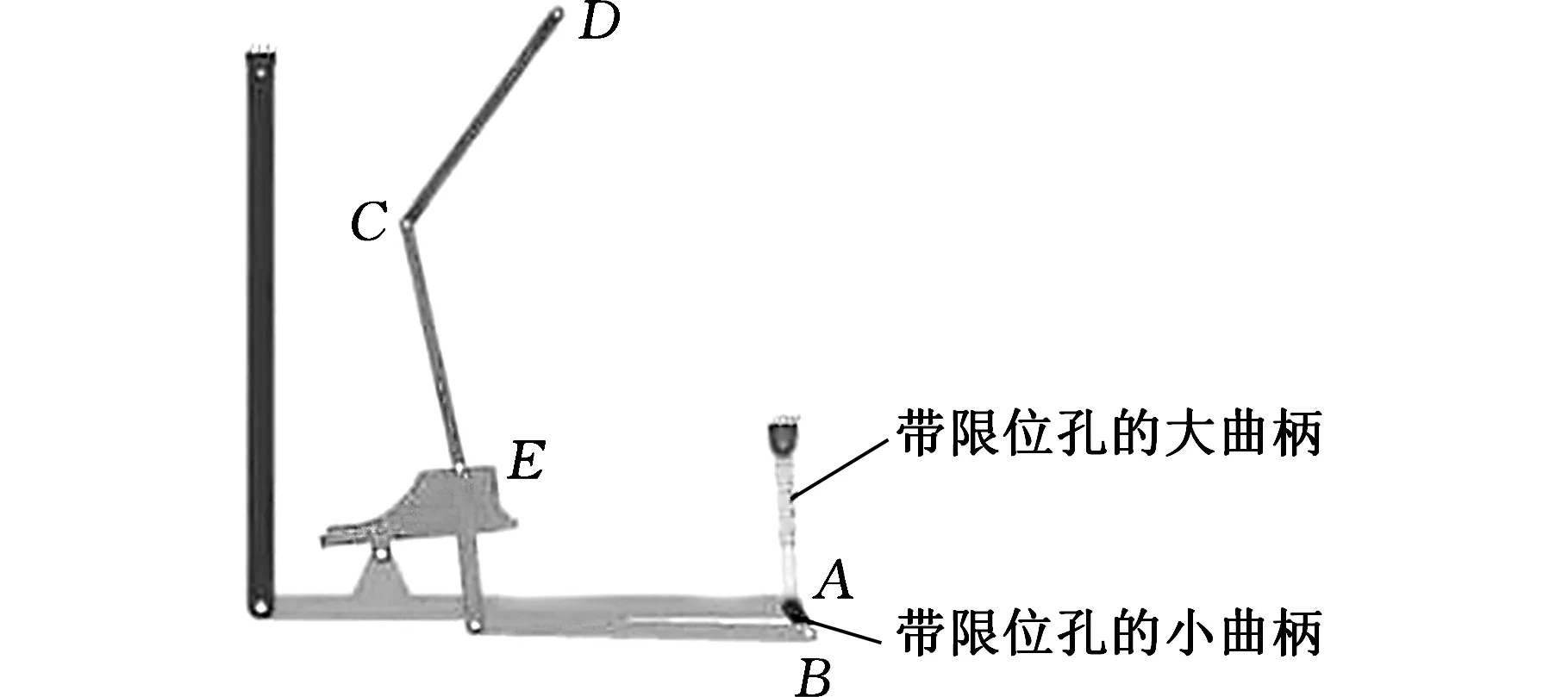
图6 下肢驱动机构
1.2坐式辅助机构

图7 坐式辅助机构
大量临床医学理论证明,具有下肢功能障碍的患者的躯干和下肢承重能力呈大幅度下降趋势,这也是导致患者步行出现障碍的重要原因。因此在设计下肢康复训练机器人的机械结构时,针对减轻患者部分体重的结构设计是非常必要的。有了这样的结构装置,就能在很大程度上减轻患者腿部关节的负担。本下肢康复机器人扶手和显示屏固定在支架上,调节座椅的升降高度除了可给下肢减载之外,还可以适应不同身高患者的训练姿势。针对本康复训练机器人设计的坐式辅助机构,采用调节升降的座椅,该座椅采用内部液压系统实现升降,并且可以进行90°旋转调整,方便人入座和调整姿势,此外该结构简单,成本较低。其三维模型如图7所示。
1.3外骨骼护罩机构
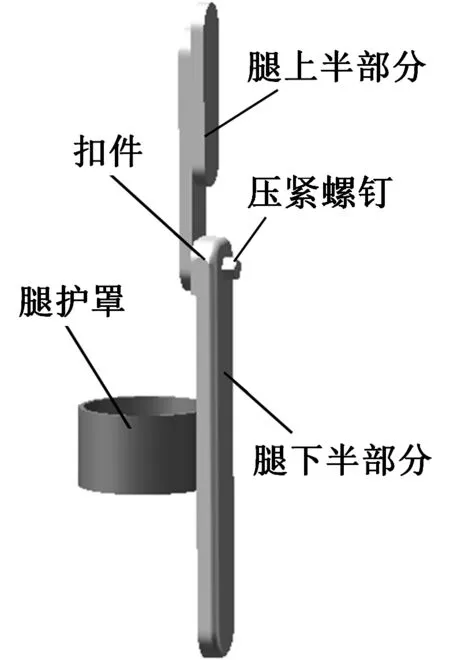
图8 外骨骼护罩机构
下肢患者在康复过程中不可避免地会出现腿部侧移和翻转的情况,从而导致康复训练不能有效进行。为此,针对本康复机器人设计了外骨骼护罩机构,其模型如图8所示,主要由腿上半部分、腿下半部分、腿护罩、压紧螺钉和扣件组成。在康复训练过程中,机器能够通过外骨骼护罩机构的固定作用,将患者下肢约束在指定的活动范围内,从而避免腿部侧移或翻转情况,保持正确的康复训练姿势。外骨骼护罩机构的大腿杆和小腿杆均可以进行适当范围的调整,从而能够满足不同人的体型和身高要求。
2 位姿调节机构和变曲柄机构的设计
2.1位姿调整机构的设计
目前的步态控制机构多是简单的曲柄摇杆机构,通常是将脚踏板固定在一运动连杆上,形成类似椭圆的轨迹,但是脚踏板的角度是不可变的,因此可能使患者出现不协调运动甚至发生关节损伤。人们逐渐认识到这个问题,很多研究者在此方面展开了研究工作,取得了一定的成就。为了克服这个缺陷,人们往往把结构设计得很复杂,或是成本太高,如哈尔滨工程大学机电一体化实验室开发的一种下肢康复机器人,它直接在两个踏板上加上滚珠丝杠通过伺服电机控制脚踏板的角度[7],这样固然能够精准调节角度,但成本太高而且控制过程中难度明显增大,不适用于大规模应用。
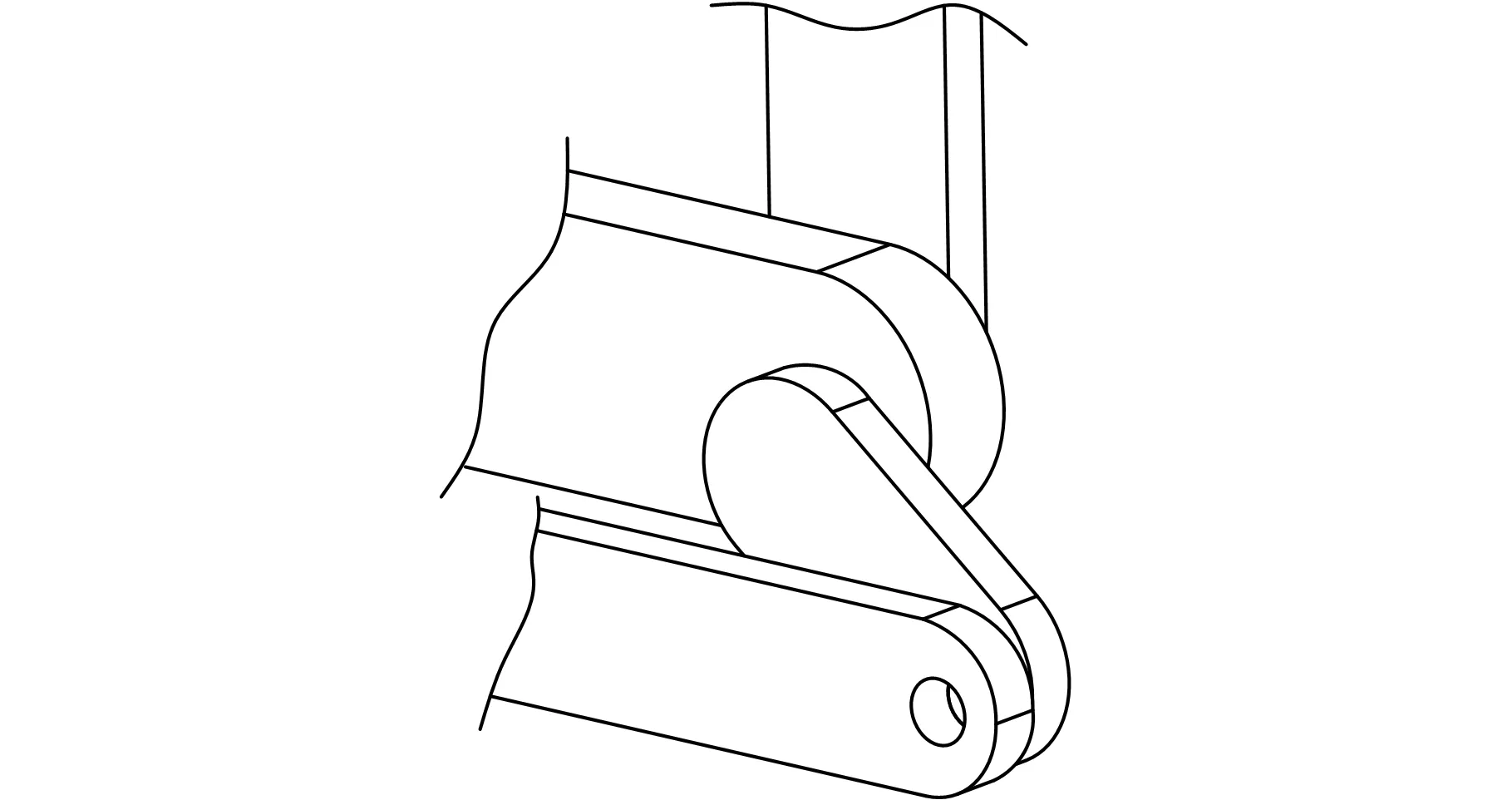
图9 位姿调节机构原理图
在现有下肢康复机器人的结构基础上,本脚踏式下肢康复机器人采用了一种结构更加简单,且能实现其功能的脚踏板位姿调整机构,如图9所示。在曲柄摇杆机构基础上,曲柄一端与主轴连接,另一端在与连杆相连的同时,连接一个小曲柄,此小曲柄与大曲柄相对静止并保持一定的夹角。在大曲柄做圆周运动的同时带动小曲柄也做圆周运动,小曲柄另一端连接一连杆并与脚踏板铰接,构成脚踏板的一个支点,脚踏板上另一支点铰接在主连杆上,两副四连杆机构可以使得脚踏板一方面在大曲柄的作用下走出类似椭圆的轨迹,另一方面在小曲柄的作用下能够调节踏板的角度,达到角度随轨迹运动随动的变化效果,在二者的协调配合下,实现人体下肢正常行走步态。
2.2变曲柄机构的设计
目前很多的下肢康复训练机器人只能产生固定步长和步高的类椭圆轨迹,不能进行灵活调节,给下肢康复训练带来很多不便。一方面,由于不同身高的患者在行走时产生的类椭圆步态轨迹不同,对步长和步高会有不同的要求;另一方面,同一患者在不同的康复阶段对步长和步高也会有不同的要求,在康复训练初期,由于下肢活动能力严重缺失,可选择较小的步长和步高,随着患者下肢活动能力的逐渐恢复,在康复训练过程中应适当逐步加大步长和步高。因此在设计下肢康复训练机器人的过程中,变曲柄结构的设计显得尤为重要。本机器人采取在曲柄上设计不同限位孔的方法来达到改变曲柄长度从而改变步态运动轨迹的目的,其工作长度调节示意图见图10。
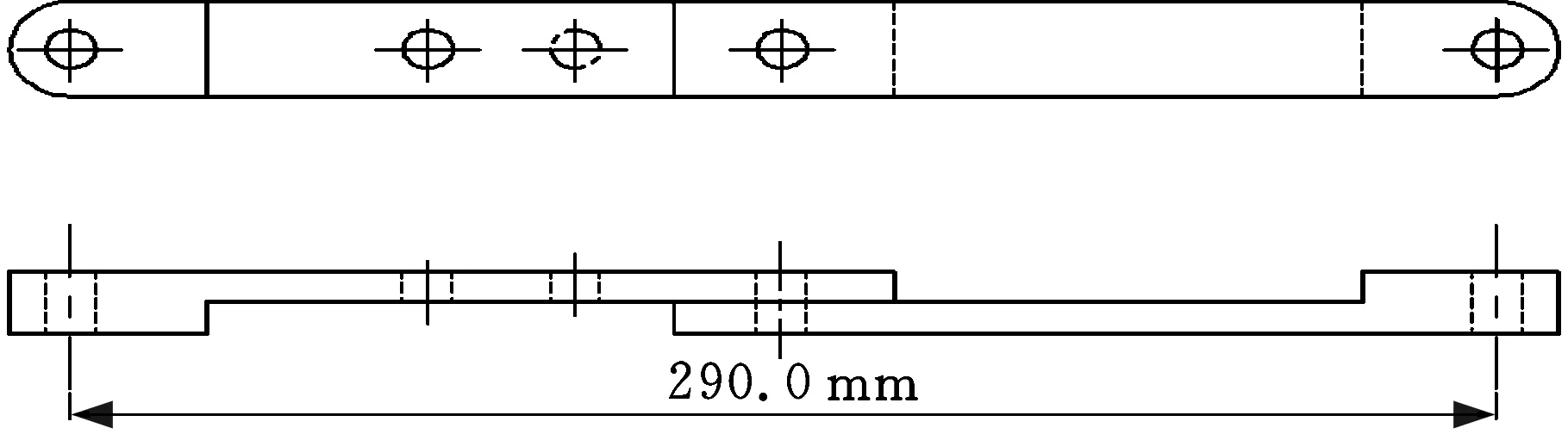
图10 曲柄工作长度调节
对于不同的曲柄工作长度,该机器人四连杆结构尺寸以及得到的类椭圆相关参数如表1所示。
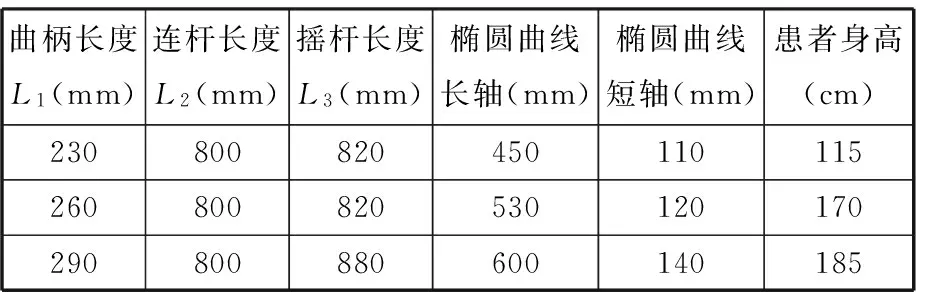
表1 变曲柄四连杆结构尺寸
3 机构运动学仿真
3.1步态轨迹曲线的仿真分析
曲柄摇杆机构是实现类椭圆轨迹的核心机构,是下肢康复训练机器人的主体结构部分。该下肢康复训练机器人通过调节设在四连杆上不同的限位孔,可实现步长的调节,满足不同身高的患者进行康复训练。经仿真,得出不同身高的步态轨迹如图11所示。
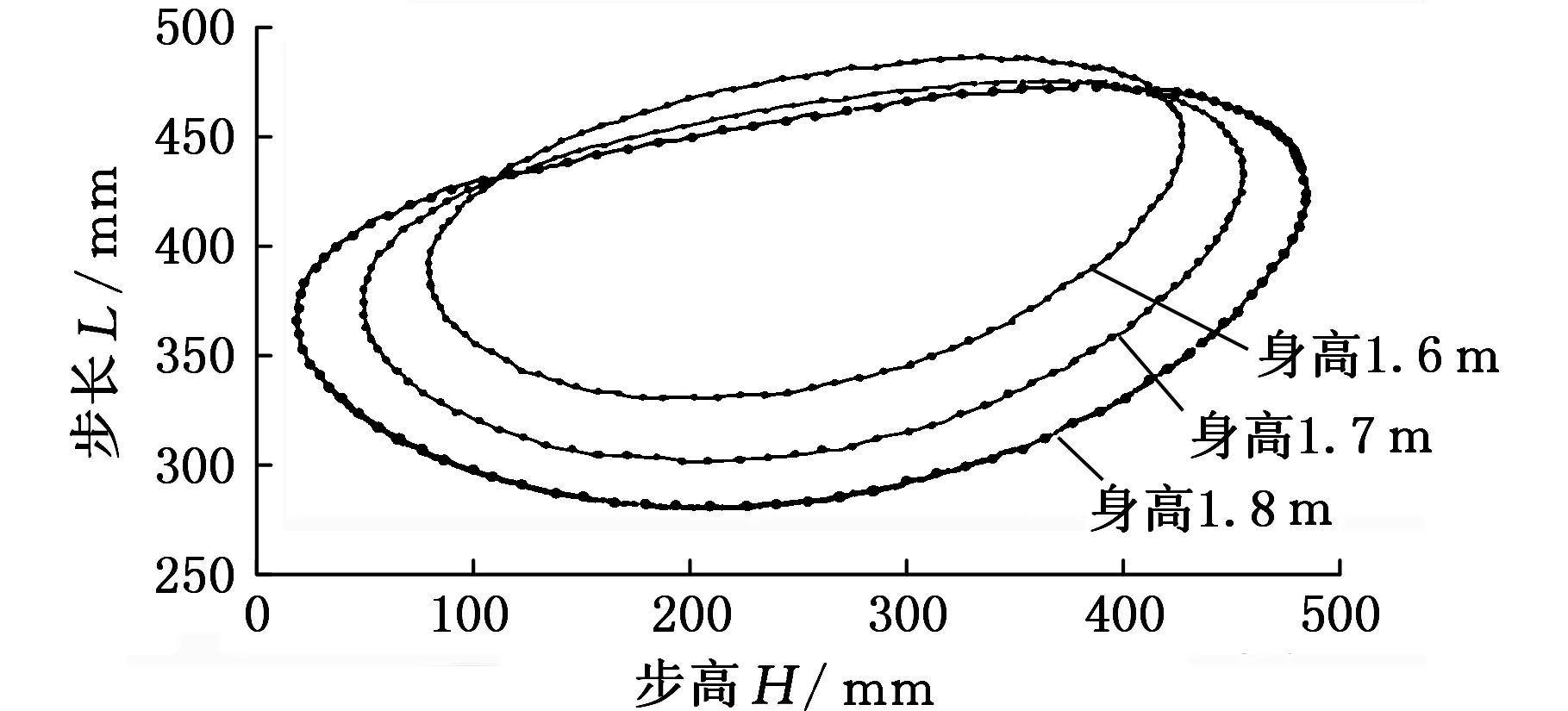
图11 不同身高步态轨迹曲线图
根据资料,健康人平地行走时,一般步长L的范围为500~800 mm,患者平地行走时,一般步长L的范围为300~550 mm,该下肢康复机器人变曲柄机构步长L的调节范围为340~460 mm,基本符合患者的使用要求。
3.2脚踝位姿的仿真分析
下肢患者在进行康复训练过程中除了模拟跨步摆动之外,还需要模拟踝关节的转动,且两者之间的运动是相互协调的。为了得到脚踏板的运动规律,需知道正常人在行走时脚与地面之间角度变化的规律,据相关资料,一个步态周期T内脚与地面之间角度θ变化的曲线见图12[8]。一个步态周期T内,脚跟着地时即周期T为0处,踝关节出现周期中的第一次跖屈高峰,θ的平均值为11.33°±4.71°;跖屈随后变少,在0.16T处转为背伸,这相当于站立相中期越过支撑足;在0.462T处达到背伸,θ的平均值为10.94°±3.75°;站立相在推离期跟部离地时,再次出现跖屈,在摆动前期跖屈继续增加,在0.69T处θ达到第二次高峰值(一周期中最高值),θ的平均值为15.67°±6.51°;之后踝关节跖屈减少并接近中立位,足底与地面大致平行,为足平摆。此周期结束后将进入下一周期的足跟着地的准备期。
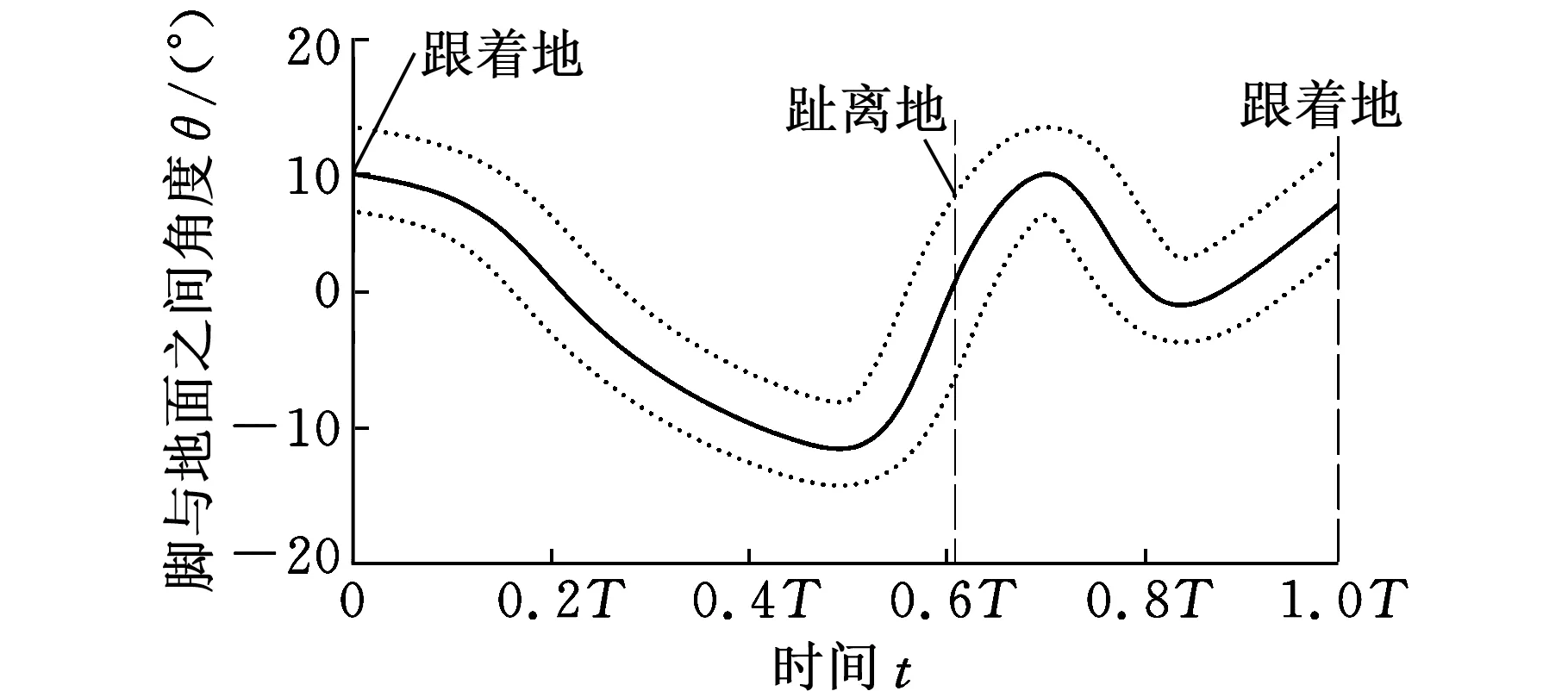
图12 平地常速步行时踝关节在矢状面上的角度-时间曲线[8]
针对该脚踏式下肢康复机器人,经仿真得出不同身高踝关节角度变化曲线见图13。根据资料,正常人在行走时,踝关节角度γ变化在-12°~16°之间[8],仿真得到的踝关节的角度-时间曲线(图13)的变化趋势和参照曲线(图12)大致吻合,且角度变化值在合理、可行的范围之内,故该脚踏式康复训练机器人的总体结构设计基本符合患者康复训练的要求。
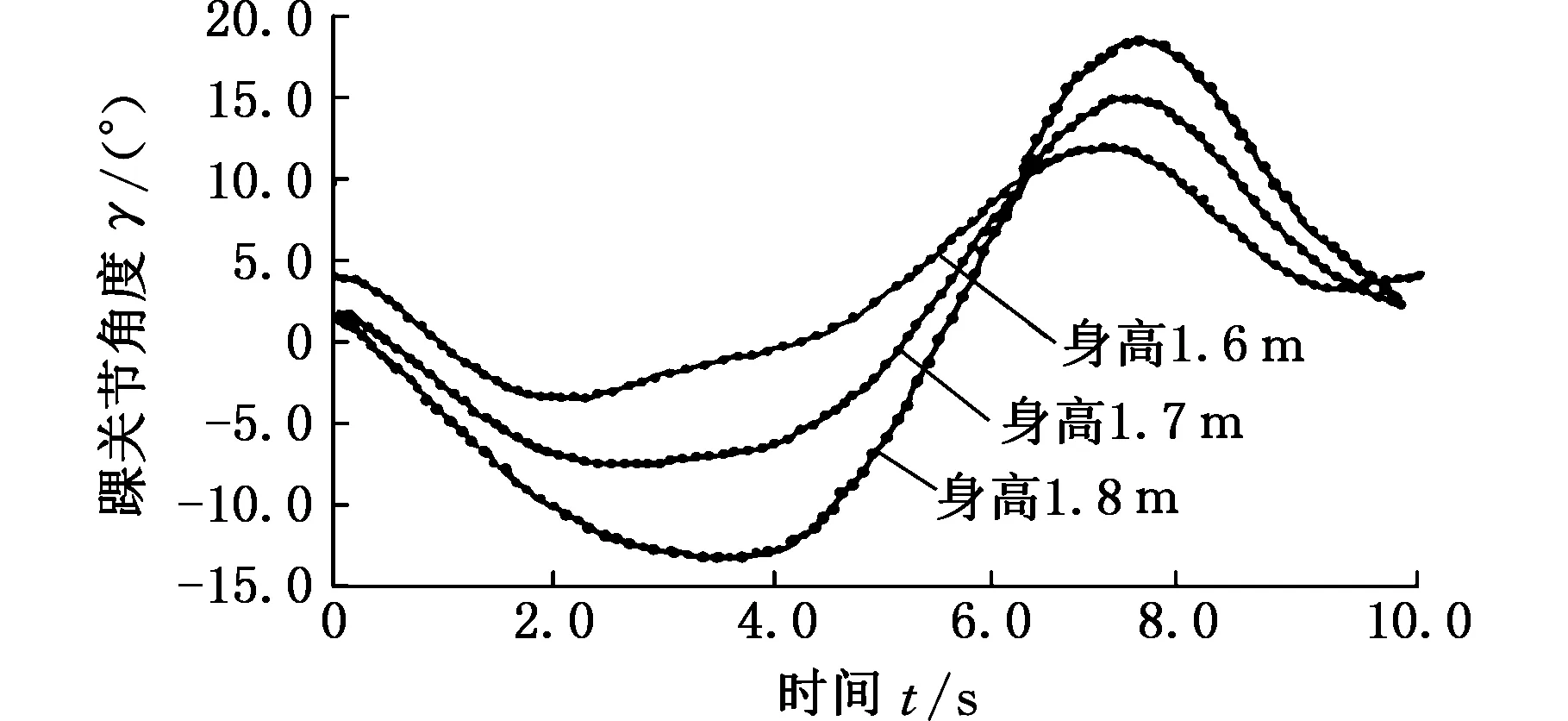
图13 不同身高踝关节角度变化曲线图
4 基于软件的机构仿真
通过软件在机构上建立相关连接、添加驱动和定义运动类型来实现机构的运动仿真。通过机构的运动仿真,可以对下肢康复训练机器人进行运动轨迹、位移、运动速度和加速度以及运动干涉的检查。
在进行康复时,在曲柄处添加旋转驱动,设置为匀速转动,转速为36°/s,仿真时间t为10 s。仿真结果如图14所示。由仿真数据得出,在矢状面范围内患者下肢屈伸活动范围为0°~145°,伸直活动范围为0°~20°,均在正常人行走的合理活动范围之内。
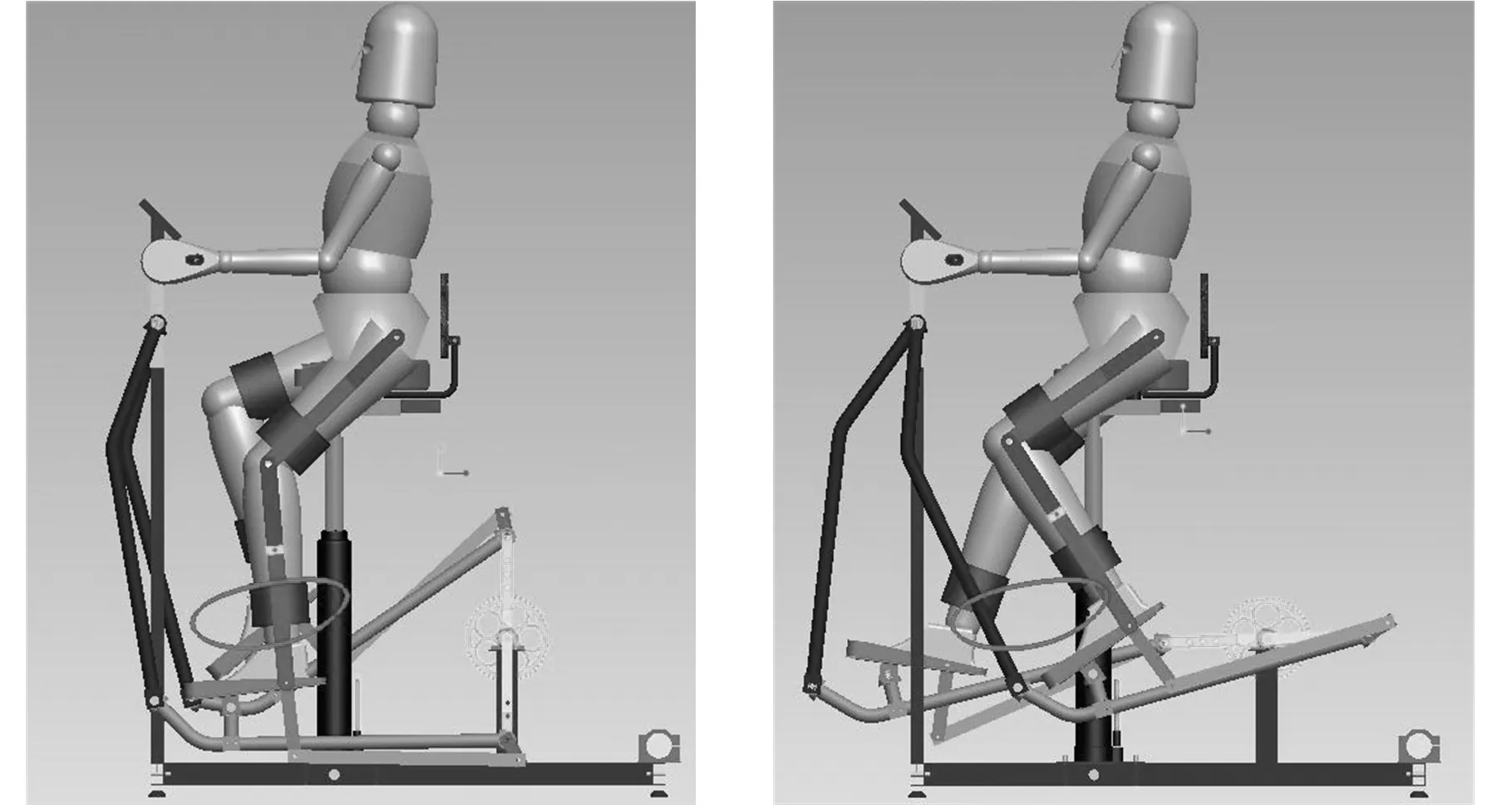
(a)t=1 s时机器人运动状态 (b)t=2.5 s时机器人运动状态
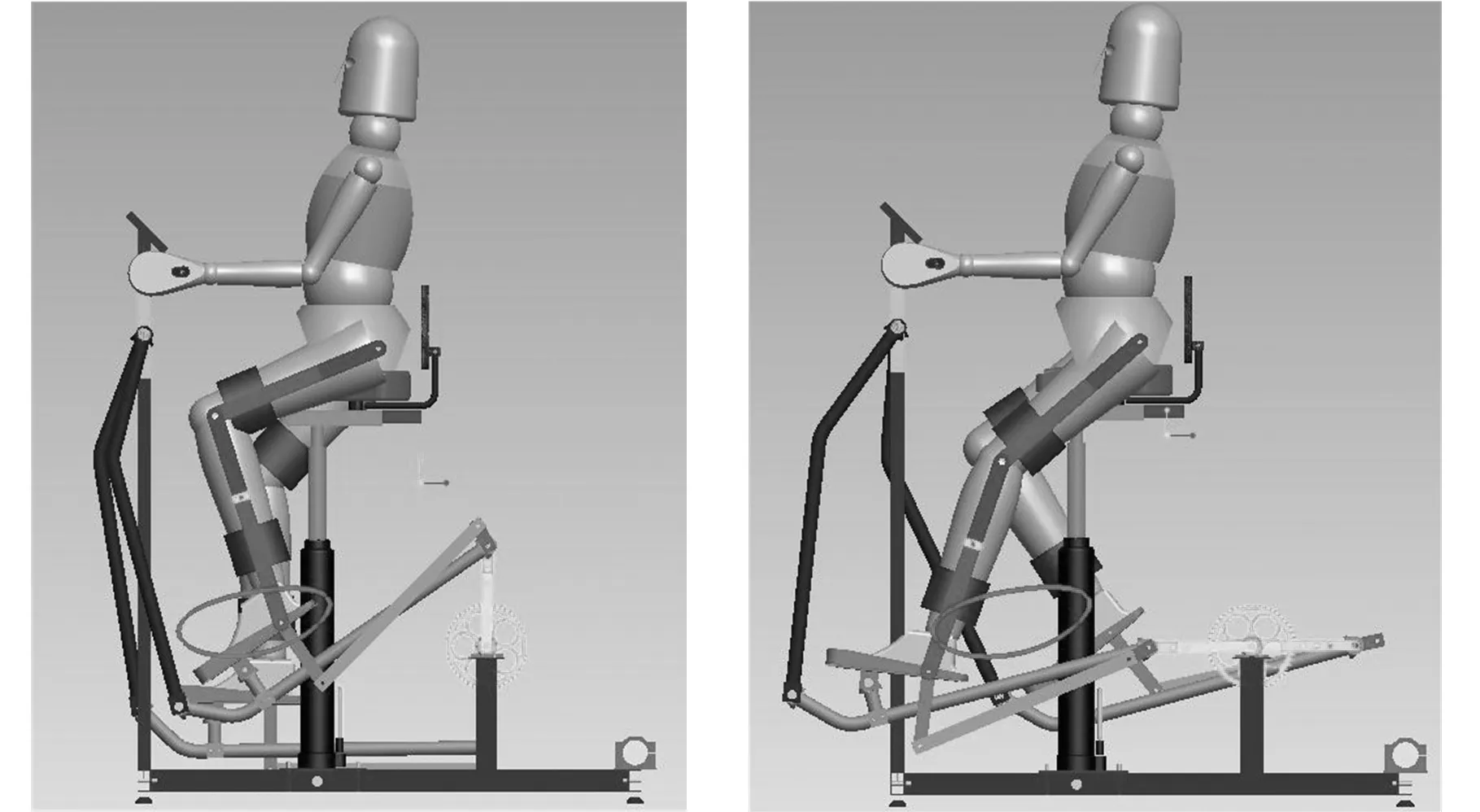
(c)t=5 s时机器人运动状态 (d)t=7.5 s时机器人运动状态图14 机器人运动状态图
5 实验研究
在软件数据仿真可行的基础上,还需要进行实验研究,以验证该脚踏式下肢康复机器人的可用性、可行性。根据最终确定的机构尺寸参数制作出下肢康复训练机器人实体模型,如图15所示。

图15 下肢康复训练机器人实体
为了测量人体进行康复训练时下肢各关节的变化规律,需要在人体的躯干、大腿、小腿和脚底分别固定角度传感器,搭建实验平台,如图16所示。通过测量得出,髋关节角度转角变化范围在-11°~30°之间,膝关节角度的转角变化范围在0°~-39°之间,踝关节角度的转角变化范围在-10°~18°(各角度均采用锐角)。正常人行走时,髋关节角度转角变化范围在-12°~31°之间,膝关节角度的转角变化范围在4°~-56°之间,踝关节角度的转角变化范围在-12°~16°之间[9]。通过数据比较分析,实验数据在允许的合理范围之内,所以该下肢康复训练机器人基本符合患者康复训练要求。
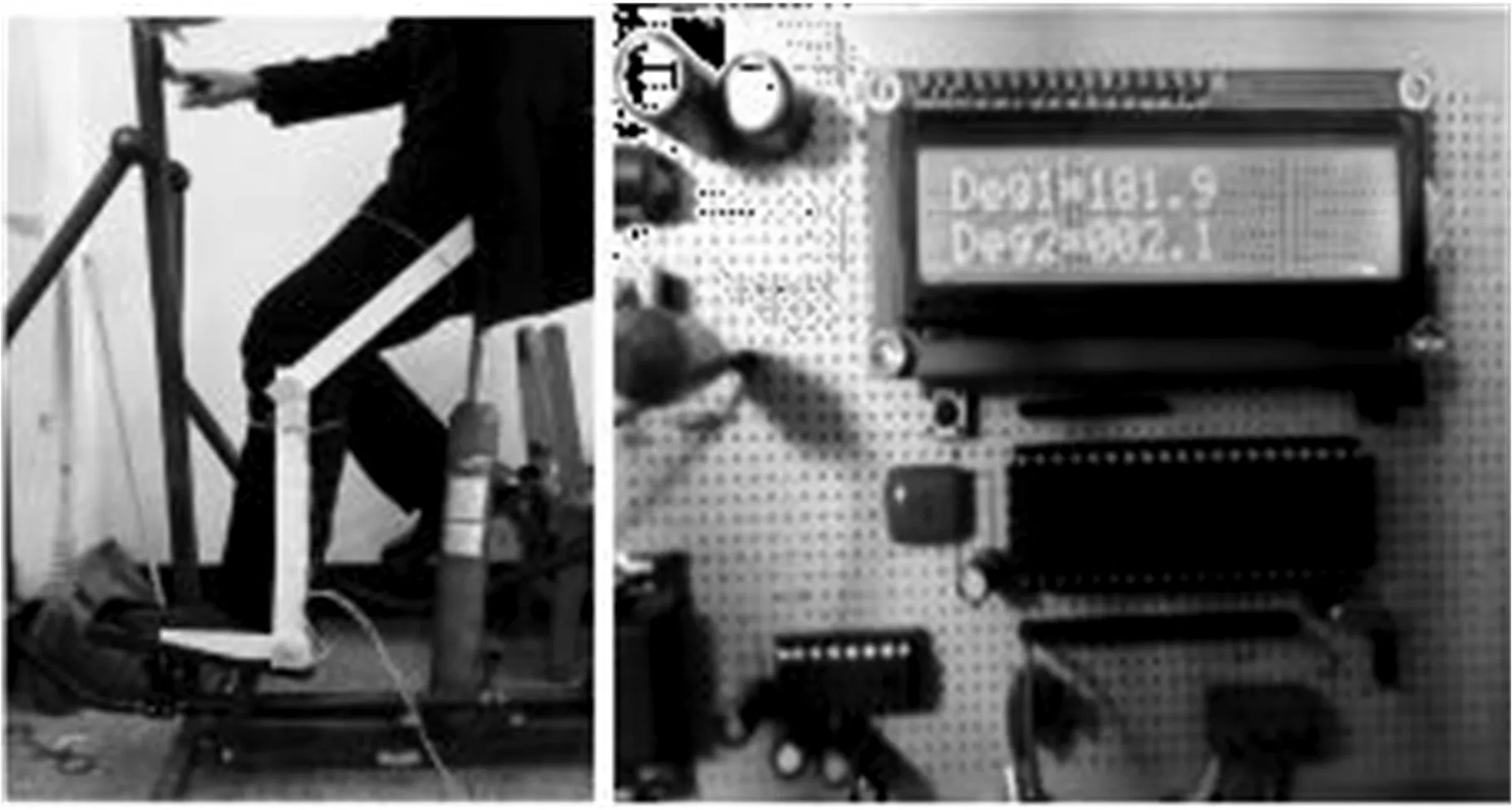
(a)下肢关节角度测量 (b) 下肢关节角度显示图16 实验平台
6 结语
本文提出的脚踏式下肢康复机器人能够通过调整自身机构参数来改变步态运动步长、步高的大小,从而适用于不同下肢长度的患者;能够较准确地模拟正常人的行走跨步和踝关节的转动,并且使两者协调运动。运动学仿真数据结果表明该机构符合下肢康复训练系统的整体要求。此外该机器人结构简单紧凑,利用低成本的设备就能够实现对患者的下肢进行科学的康复训练,适宜推广,易于产品化。
[1]金德闻,张济川. 康复工程学的研究与发展[J]. 现代康复,2008,4(5): 643-646.
JinDewen,ZhangJichuan.ResearchandDevelopmentofRehabilitationEngineering[J].TheModernRehabilitation, 2008,4(5): 643-646.
[2]王永敏. 脚踏式下肢康复训练机器人的研究与实现[D].天津:河北工业大学,2013.
[3]RoyA,KrebsHI,WilliamsDJ.Robot-aidedNeurorehabilitation:aNovelRobotforAnkleRehabilitation[J].IEEETransactionsonRobotics,2009,25(3):569-582.
[4]史小华,王洪波,孙利,等. 外骨骼型下肢康复机器人结构设计与动力学分析[J]. 机械工程学报,2014,50(3):41-48.
ShiXiaohua,WangHongbo,SunLi,etal.DesignandDynamicAnalysisofanExoskeletalLowerLimbsRehabilitationRobot[J].JournalofMechanicalEngineering, 2014,50(3):41-48.
[5]张杰. 脑卒中瘫痪下肢外骨骼康复机器人的研究[D].杭州:浙江大学,2007.
[6]刘靖. 气动肌肉驱动的下肢康复训练器的研制[D].广州:广东工业大学,2008.
[7]张晓超,张立勋,颜庆.一种新型三自由度下肢康复训练机器人步态机构运动分析及仿真[J].自动化技术及应用,2005,24(3):32-35.
ZhangXiaochao,ZhangLixun,YanQing.GaitAnalysisandSimulationofa3-DOFRehabilitativeRobot[J].TechniquesofAutomationandApplications,2005,24(3):32-35.
[8]戴克戎,汤荣光. 平地常速行走时的步态观察[J]. 中国生物医学工程学报,1982(5):15-21.
DaiKerong,TangRongguang.GaitObservationofaConstantSpeedWalking[J].ChineseJournalofBiomedicalEngineering,1982(5):15-21.
[9]郭忠武,王广志.正常青年人步态运动学参数的研究[J].中国康复理论与实践,2002,8(9):532-533.
GuoZhongwu,WangGuanghi.ResearchonGaitKinematicsParametersofNormalYoungPeople[J].ChineseRehabilitationTheoryandPractice,2002,8(9):532-533.
(编辑苏卫国)
Design and Simulation of a Lower Limbs Rehabilitative Robot
Liu RuisuXing XinchuangLiu YananYe XietongWang Yongmin
Hebei University of Technology,Tianjin,300130
A three-dimensional model of a lower limbs rehabilitative robot was built with Pro/E software. A gait mechanism which might change the step length and the pose of the ankle was designed. Kinematics simulation was carried out on the lower limbs rehabilitative robot, and the simulation results show that this mechanism may simulate human natural gait movement, and accords with robot system requirements.
lower limbs rehabilitative robot; rehabilitative training; mechanism model; kinematics simulation
2015-12-03
TP242
10.3969/j.issn.1004-132X.2016.20.005
刘瑞素,女,1963年生。河北工业大学机械工程学院教授。研究方向为机电控制及其自动化。发表论文20余篇。邢新闯,男,1991年生。河北工业大学机械工程学院硕士研究生。刘亚男,男,1991年生。河北工业大学机械工程学院硕士研究生。叶协通,男,1991年生。河北工业大学机械工程学院硕士研究生。王永敏,男,1986年出生。河北工业大学机械工程学院硕士研究生。
