基于模糊机制的ZigBee无线网络控制系统的优化
2016-10-31陆忠树
陆忠树


摘要:无线网络作为通信网络的重要组成部分,近年来得到了飞速的发展,其灵活、节约、便利的特点受到了用户的广泛好评,尤其是在一些地形条件复杂的生产场合,如井下、矿山、森林等,无线通信的特长更是得到了充分的发挥,其作用无可替代。基于ZigBee的无线网络控制系统WiNCS属于自适应闭环控制系统,在工业生产中发承担着重要的远程控制作用,该领域的研究包含了计算机控制、人工智能和网络通信等多个学科。该文对目前无线网络控制系统存在的问题进行了分析和研究,并提出将人工智能领域的模糊机制同自动控制领域的PID技术相结合,生成一种新的混合型智能方法,对无线网络控制系统进行优化,有效提高了该系统的各项性能指标,具有一定的实用价值。
关键词:ZigBee 无线网络;控制系统;模糊机制 PID
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2016)22-0027-03
1 无线网络控制系统概述
近年来,随着无线通信技术的不断发展,无线网络的覆盖率迅速扩大,目前已经广泛的被应用在工业生产、国防科技、医疗卫生、城市交通等各个领域,为我国生产力的发展和百姓生活提供了便捷、灵活、高效的信息通信服务。尤其在各种工业控制场合,无线网络更是因为其特有的优势成为了一种不可替代的远程控制系统的传输媒介,目前,无线网络控制系统(WiNCS)已经逐渐成为了自动控制领域发展的主要方向,根据无线网络的分类,将该系统分为基于IEEE 802.1 lb协议的无线局域网络控制系统和基于IEEE802.15.4协议的无线ZigBee网络控制系统,前者一般用于普通用户数据传输,带宽较大,但是成本相对较高;后者主要面对工业生产中的控制需求,本文即针对后者进行研究和优化,图1给出了基于ZigBee的网络控制系统中控制器、执行器和传感器的结构关系。
ZigBee的诞生来源于工业生产控制场合对低功耗、低成本、安装维护方便的无线通信网络的需求,在这类控制场合里,对带宽的需求往往不是很高,网络仅仅需要承担控制指令和采样数据的传输任务即可,但对系统的稳定性及功耗则有着较高的要求。802工作组针对此种情况,推出了IEEE802.15.4协议,而ZigBee正是基于这一标准而研发的一系列关于组网、安全和应用软件的技术。
2 无线网络控制系统存在的问题
在采用了无线网络为平台,完成控制信息的传输之后,系统的复杂性有了一定程度的提高,同时作为传输媒介的无线网络也易受到某些因素的干扰,从而给系统的稳定性造成了一定的负面影响。在查阅大量文献之后,总结出目前无线网络存在的主要问题有以下几点:
(1)时钟同步
WiNCS的时钟同步问题一直是该类系统发展的一大障碍,由于控制系统不再是集中于一地,因此各个控制环节之间的信息传输就会存在一定的时延,从而导致控制指令很难实现同步,加上系统的硬件偏差,使得采样错误和数据包出错的概率大大增加,从而降低了控制质量,甚至导致生产故障。
(2)网络时延
网络时延的大小直接影响到了控制系统的实时性,尤其对于要求响应速度快的被控系统而言,由于无线网络的时延过大,可能会导致系统出现累加延迟效应,使得控制系统失去了实用性。网络时延可以分为信道访问时延、队列时延和转发时延三类,其中影响最大的是队列时延,即数据信息在多个节点跳转的过程中,在每个节点缓存队列里排队等待的时延之和。
(3)数据包失序
根据现代计算机网络所采用的分组转发方式,各个分组在转发的过在发送时所选择的路由并不是唯一的,这就导致某些数据包可能出现“后发先至”的情况,这也给接收方带来了一定的处理开销。
(4)数据包丢失
数据包的丢失问题可以分为两种情况,即主动丢包与被动丢包。前者是系统为了确保其实时性,将时延过长,已失去使用意义的数据包主动丢弃,并禁止发送方重传;后者是指数据包由于延迟过长,超过了设定的重传时间上限而将其丢弃,这种情况通常是由于各种网络故障造成的,如网络拥塞、节点硬件故障等。
本文针对上文总结的无线网络控制系统存在的问题进行分析和研究,采用人工智能领域的模糊机制和自动化控制领域的PID算法相结合,对基于ZigBee的无线网络控制系统进行优化和改进,以下介绍相关的算法思路。
3 模糊自适应PID控制算法研究
模糊控制的本质是模仿人类的控制经验,增加了先验知识对优化策略的影响,简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。利用控制法则来描述系统变量间的关系,不必对被控制对象建立数学模式,是一种容易控制、掌握的较理想的非线性控制器。前在控制场合中,最常使用的是二维模糊控制器。
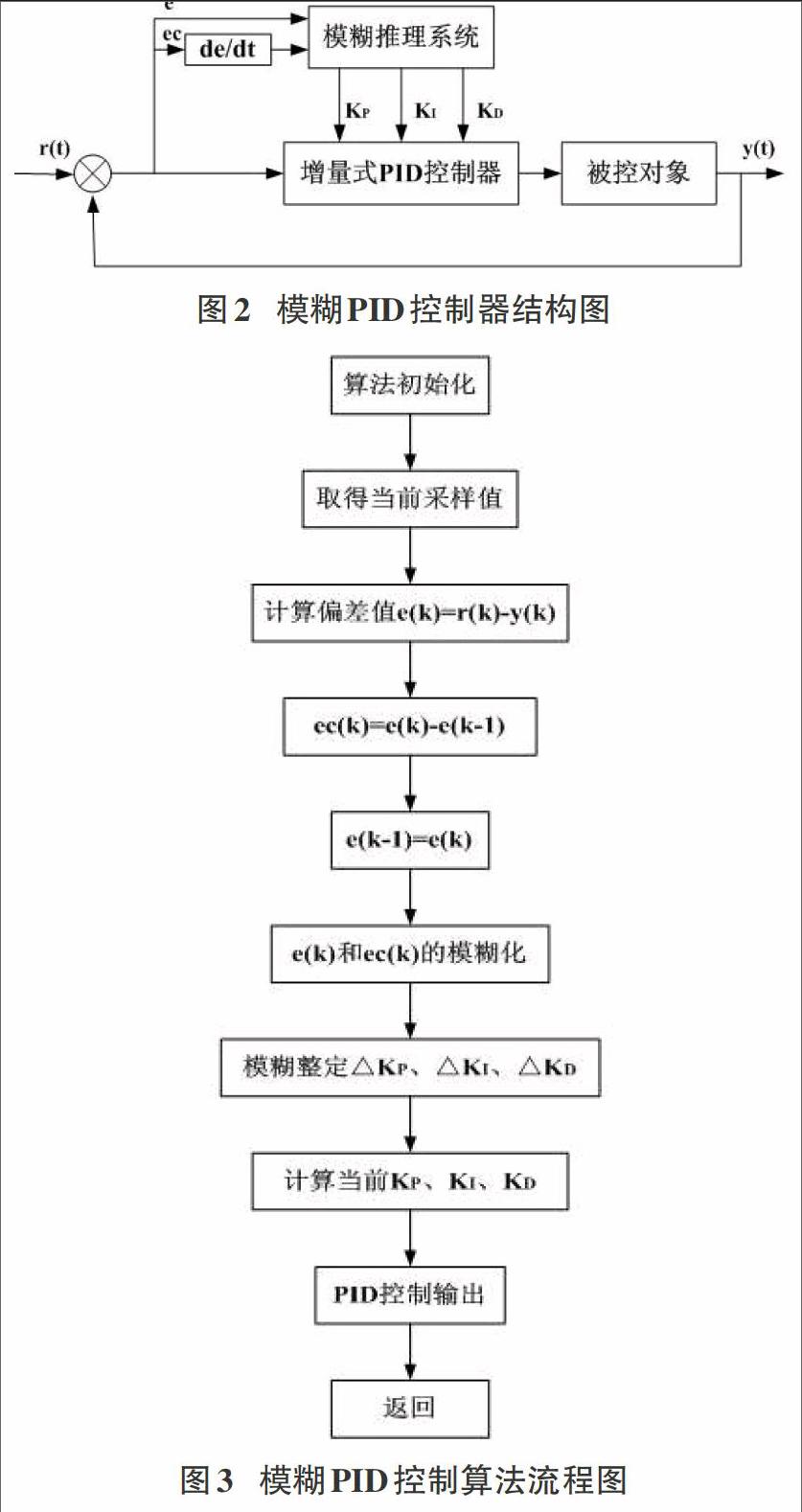
PID算法是自动控制领域中应用最广泛的一种可靠的控制算法,利用比例、微分、积分等计算方式的结合,来达到不同的自动调节效果,该算法兼容性良好,目前已经同许多优秀的智能算法相结合,生成了多种多样的混合型控制方法。本文提出将把PID控制方法同模糊机制相结合,既发挥PID对于静态控制的优势,利用模糊机制来完成动态微调,使得控制输出进一步逼近理想值,提高了控制质量。本文设计的模糊PID控制器的结构如图2所示:
由上图中的算法流程可以看出,模糊机制的作用主要体现在提高PID控制的参数整定效率,充分利用先验知识,快速缩小参数选值范围,对PID控制优化起到了良好的促进作用。
4 仿真结果分析
对了对比本优化算法的有效性,仿真实验采用了一阶阶跃波形为参照,并选定了时延和丢包率这两种无线网络控制系统的关键参数为影响因素,对模糊PID控制系统和传统的PID控制系统的响应效果进行跟踪,观察这两种控制方案对一阶阶跃波形的跟踪效果,从而比较两种方案的各自的性能。
(1)在相同的时延为3ms的条件下,分别采用传统PID和模糊PID作为控制器,响应曲线如图4所示。
图4中,虚线波形为传统PID响应曲线,实线为模糊PID的响应曲线,对比分析可以看出模糊PID对阶跃波形的跟踪效果明显更优,对波形的跟踪效果更好,在大约0.13s已经逼近了理想值,而传统PID的虚线波形则分别在0.07s、0.11s和0.14s左右时刻发生了超调,于0.2s才实现收敛,因此可以证明,模糊PID的控制性能要远远好于传统PID的控制性能,优化效果明显。
(2)在设定丢包率为5%的条件下,两种控制器对阶跃波形的跟踪效果如图5所示:
同图4一样,虚线为传统PID响应曲线,实线为模糊PID的响应曲线,设定了丢包率为5%,即意味着在系统不断调节的过程中受到了较大的干扰,因此图中虚实两条曲线波形都存在较大的超调,但模糊PID响应曲线明显的要比传统PID响应曲线更早的逼近理想值,且超调幅度相对较小,优化效果明显。
5 结论
根据仿真结果,可以得出如下结论:
(1)根据以往的实践经验,在理想环境,即不存在时延和数据包丢失的情况下,常规PID和模糊PID控制质量相当,对波形的跟踪效果较好,且响应速度较快,都能较好的完成控制任务。
(2)在存在时延和丢包率的情况下,模糊PID控制器都表现出了更好的跟踪效果,说明当网络处在一定程度的干扰的情况下,后者可以更好地适应网络的变化,在更短的时间内完成收敛,优化效果明显。
(3)除本文列出的时延与丢包率这两种影响因素外,还对采样周期、网络带宽、系统功耗等因素进行了仿真分析,结果均证实了本优化策略的有效性,但参数组合设定的不同对无线网络控制系统的运行表现起到了较大的影响,在实际运用之前,应根据不同的无线网络进行反复测试,选取最佳的参数组合,才能够有效的提高系统效率。
参考文献:
[1] 韩安大.无线网络控制系统中的延时分析及算法设计[D].杭州:浙江大学,2007.
[2] 张卫东. 基于改进模糊免疫PID控制的网络控制系统[D].海口:海南大学,2012.
[3] R.Alur,A.Dinnocenzo,K.H Johansson,G.J.Pappas,G.Weiss.Compositional modeling and analysis of multi-hop control nerworks [J]. Automatic Control,IEEE Transactions on ,2011,56(10):2345-2357.
[4] 赵铭,宋俊德.无线通信与网络[M].北京:国防工业出版社,2008.
[5] 赵亚平.模糊免疫PID算法在焦炉温度控制中的研究[D]. 沈阳:东北大学,2006.
[6] 王岩,孙增圻.网络控制系统分析与设计[M].北京:清华大学出版社, 2009.
