虚拟二维激光雷达成像积分算法
2016-10-31李志雄史思总
卜 燕,沈 俊,张 华,李志雄,史思总
(西南科技大学 信息工程学院,四川 绵阳 621000)
虚拟二维激光雷达成像积分算法
卜燕,沈俊,张华,李志雄,史思总
(西南科技大学 信息工程学院,四川 绵阳621000)
虚拟二维激光雷达是激光雷达扩展应用的组成部分,可以结合3D场景点云特征进行二维激光雷达扫描障碍物模拟;提出根据光线传导特征建立积分方程得到了在多障碍物场景下的激光雷达图生成的解析解,利用AutoCAD与Visual C#联合编程的方法进行了虚拟激光雷达的实现;最后,实验结果与真实二维激光雷达比对,虚拟激光雷达能从3D场景中准确提取物体的位置和距离信息。
激光雷达;虚拟;图像积分;场景扫描
0 引言
虚拟现实是人类在探索世界中创造的一种用于认识对象、模拟对象的有效方法。虚拟激光雷达是一类以计算机模型模拟激光传播、测距、成像原理形成激光图像的技术,对于激光雷达的开发和拓宽应用有着指导性的意义,国外早已经开始虚拟激光雷达的研究,研究内容涉及高速运动对象[1]、多工作原理[2-4]、复杂大气[5-7,8]、多物体场景[5,9-10]等,不乏有国际大公司参与。国内目前对于虚拟激光雷达相关的研究以针对某一种特殊对象或场景,通过真实激光采集数据获取目标3D[11-12]或者2D[13]重构,或利用单物体的3D模型生成虚拟激光雷达图验证某一激光成像原理[13-16],研究多数集中于一维和三维,且建立虚拟激光雷达仍以实际激光雷达测量数据为基础。
目前虚拟雷达成像领域较多的研究是以仿真真实激光雷达成像的过程,这些研究深入认识了激光雷达成像过程。但与真实激光雷达不同,虚拟激光雷达在3D模型建立之时,物体或者场景的尺寸和位置已知,因而可以采用真实激光雷达最基本的脉冲法和相位法以外的方法,如图像微分法[1]、反射成像法[5],同时虚拟激光雷达不同于真实激光雷达受大气、分辨率、距离、随机噪声等影响,可获得边缘清晰、距离自定义的图像。
本文以多物体3D场景为原始数据,类似于[1]中美国波音公司开发的Ladar仿真系统的图像微分法,建立积分模型,给出模型的解析解,获得场景任意点为中心的虚拟二维激光雷达图像。以AutoCAD和Visual C#联合编程为平台,对算法进行实现,与日本Hokuyo公司的二维专业激光雷达UTM-30LX所获得的真实环境激光图像做比对,验证本算法的有效性。
1 虚拟激光雷达成像模型
1.1激光场景的物理模型
3D场景包含多个3D模型的尺寸、位置的信息,而激光图是以空间给定一点为中心,扫描周围物体,每一扫描角度获取最远视距距离,建立的图像,可见,3D场景包含的信息量生成激光图是充分的。3D场景模型的建立可以依靠实际测量、激光扫描、视觉定位等方式并结合计算机建模形成,如图1所示。

图1 3D模型场景的建立
激光雷达对近场物体扫描时,大气衰减、散射等因素影响非常小,可以认为光线传导不衰减、不发生弯曲。从激光传导的物理原理进行分析,注重考虑光传导强度变化与距离关系,奠定激光雷达成像技术的基础。但这种描述在近场障碍物遮蔽式模拟的计算机仿真中不够简洁。
为此,在激光场景的计算机模型建立时,进行了必要的简化:1)激光沿直线传导,不衰减,不弯曲;2)3D模型表面光滑、平整;3)忽略环境背景光线对激光及激光反射光的夹杂。
1.2成像积分算法
激光雷达以给定点P为中心每一角度步长发射一次测距激光脉冲,激光脉冲遇到障碍物返回,返回的激光脉冲携带对应角度下障碍物所在距离信息,逐步的建立激光雷达图。步骤如下。
1.2.1建立世界坐标系
“我们认真梳理患者就诊的流程,分析排队的原因,觉得可以从诊间这个环节寻找突破。比如,如果诊间能够有一个收费窗口,就可以减少大量排队的时间和麻烦。医院有很多诊室,当然不可能给每个诊室安排一个财务人员和一套收费专用设备。当时,医院管理层就提出来,医生看病能不能同时收费,实现诊间结算,让患者不用多次付费排队。”杭州市第一人民医院党委书记黄进宇指出。
规定0点,X轴,Y轴,Z轴位置,根据3D模型生成截平面视图,截平面的方程α*x+β*y+γ*z+η=0 为已知平面,考虑到实际激光雷达常常以水平面扫描方式采集数据,可以设定截平面为Z=0 。
1.2.2建立激光直角坐标系
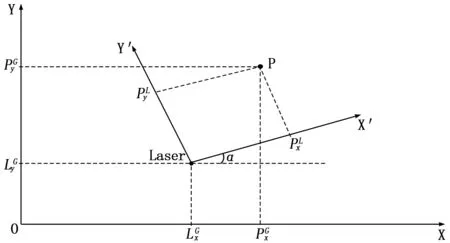
图2 激光坐标与世界坐标的关系图
平移关系:
旋转关系:
平移和旋转结合的关系:
1.2.3建立激光极坐标系
任一点在局部直角坐标系与局部直角坐标系下的位置关系:
1.2.4激光扫描的积分运算

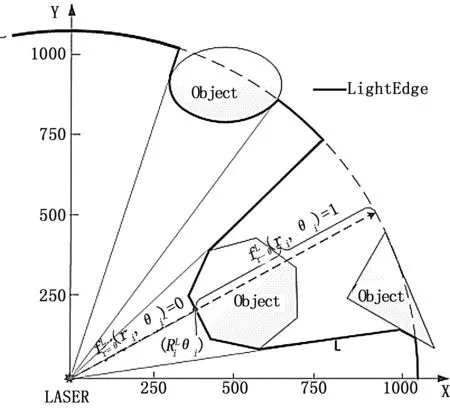
图3 多障碍物场景的激光雷达成像原理图
1.2.5扫描角度与障碍物距离关系解析解
或者
2 算法实现
激光仿真图的生成属于图像处理,AutoCAD在图形建模方面强大的功能,Visual C#是通用而高效的编程语言,本算法采用Visual C#调用CAD二次开发的方式,建立3D模型,获得扫描的截平面,由二维的截平面图获得仿真激光雷达成像如图4所示。
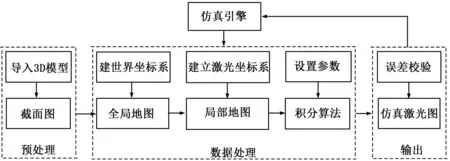
图4 虚拟激光雷达程序流程图
3 实验与结果
真实激光扫描仪UTM-30LX扫描范围0~270°、角分辨率0.25°、扫描半径最大60.0 m,考虑到实验室的大小以及障碍物放置的远近,取其1.20 m以内的数据。虚拟激光雷达参数设定为扫描范围0~360°、角分辨率0.25°、扫描半径最大1.20 m。
3.1设置实验环境
在激光雷达的半径[0,1.0]m的范围内,在不同位置,不同方向,摆放物体形成多障碍物环境(如图5(a)所示),给定激光坐标系原点在世界坐标系的坐标为(0.47,0.90),偏向角-35.5°,依据物体摆放的位置和尺寸用AutoCAD建立对应的3D模型场景(如图5(b)所示)。
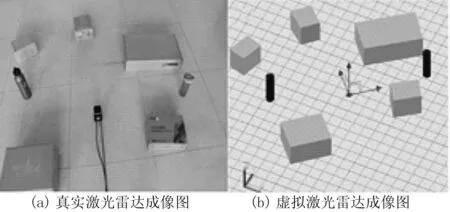
图5 真实场景与模型场景的比较图
3.2真实与虚拟激光雷达图像的获取
开启真实激光雷达UTM-30LX,获取真实激光雷达图像(如图6(a)所示);运行本算法在C#与Auto CAD联合编译的程序,获取虚拟激光雷达图像(如图6(b)所示)。
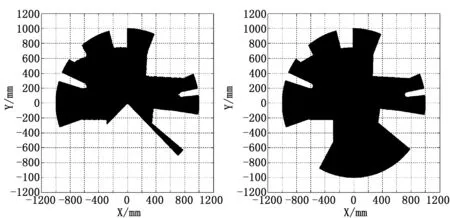
(a)真实激光雷达成像图 (b)虚拟激光雷达成像图图6 真实与虚拟激光雷达成像的对比图
3.3结果分析
1)仿真雷达图像与真实激光图像高度吻合。二者均取扫描半径1 200 mm内的数据作为对比,差值的范围-16~+16 mm,最大差异点出现在弧度值2.45的位置。虚拟激光雷达图像边沿是光滑的,而真实激光雷达图像边沿是粗糙的,这也体现计算机仿真时对物体表面进行光滑、平整的简化处理。
2)仿真激光雷达由于可以自定义扫描的角度范围、角度分辨率、长度分辨率,可以获得更大的使用自由,在本次的实验中,真实激光雷达ULX-30的扫描角度范围是0~270°,而仿真激光雷达可以设置成0~360°,真实激光雷达分辨率是0.25°,而仿真激光雷达的分辨率可以自定义设置,从而获得更细微的细节。
3)运行时间的差异。如图7所示,真实激光雷达单次扫描时间为25 ms,而仿真激光雷达的运行时间取决于扫描范围、扫描分辨率、计算机配置。仿真时扫描角度分辨率范围宜设定为0.01~0.1°,长度范围宜设定为0.1~1.0 mm,在配置为I5 双核2.2G,内存4G,独立显卡1 G的笔记本电脑上运行,单次扫描时间为10.5 ms。
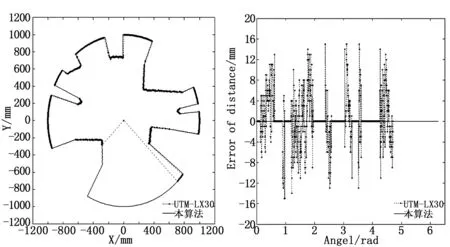
(a)边缘吻合 (b)差值分布图7 真实与虚拟激光雷达的数据对比图
4 结论
3D模型或场景含有距离、位置等丰富的信息,可以根据视觉图像生成激光图,利用虚拟激光雷达技术获取的图像携带有精简的场景信息,二维激光雷达以平面扫描方式对测物进行扫描,在获取环境信息时比立体扫描方式的三维激光雷达数据量精简、时间响应短、算法简单,有着独特的应用优势。当3D场景物体表面简化处理后,虚拟激光雷达生成图像也带有边缘光滑的特点。当3D场景与真实场景一致时,比对仿真激光雷达与真实激光雷达图后,将可以实现精确定位,并分析真实激光器的误差,将仿真实用化。
[1] Telgarsky R J,Cates M C,Thompson C,et al. High-fidelity ladar simulation[C]. International Society for Optics and Photonics,2004: 194-207.
[2] Savage J,Coker C,Edwards D,et al. Irma 5.1 multisensor signature prediction model[C]. International Society for Optics and Photonics,2006,62:390-401.
[3] Welliver M,Nichols T,Gatt P,et al. Supercomputer based ladar signature simulator[C]. International Society for Optics and Photonics,2005: 354-365.
[4] Gronwall C,Carlsson T,Gustafsson F. Performance analysis of measurement error regression in direct-detection laser radar imaging[A]. Proceedings.(ICASSP'03). 2003 IEEE International Conference on Acoustics,Speech,and Signal Processing,2003[C]. IEEE,2003,6: 545-552.
[5] Smith D,Nichols T L,Gatt P,et al. Supercomputer-based advanced ladar imaging simulator (ALIS)[C]. International Society for Optics and Photonics,2004: 142-152.
[6] Crockett G A,Brunson R L. Visualization tool for advanced laser system development[C]. International Society for Optics and Photonics,2002: 69-77.
[7] Douchin N,Joly A,Meynard T,et al. Simulation of Active EO Imaging System based on SE-Workbench and OSMoS software tools[A].5th International IR Target and Background Modeling & Simulation Workshop[C]. 2009:1-18.
[8] Han Y,Sun H,Li Y. Space-based laser active imaging simulation system based on HLA[A].ISPDI 2013-Fifth International Symposium on Photoelectronic Detection and Imaging[C]. International Society for Optics and Photonics,2013,89:512-511.
[9] Bosché F. Automated recognition of 3D CAD model objects in laser scans and calculation of as-built dimensions for dimensional compliance control in construction[J]. Advanced Engineering Informatics,2010,24(1): 107-118.
[10] Grasso R J,Dippel G F,Russo L E. A model and simulation to predict 3D imaging LADAR sensor systems performance in real-world type environments[A].SPIE Optics+ Photonics. International Society for Optics and Photonics[C]. 2006,63:30-41.
[11] 沈晶,刘纪平,林祥国. 用形态学重建方法进行机载 LiDAR 数据滤波[J]. 武汉大学学报信息科学版,2011,36(2): 167-170.
[12] 侯海平,曲长文,向迎春,等. 基于 LFMICW 的机载 SAR 前视成像研究[J]. 电路与系统学报,2011,16(3): 1-7.
[13] 金晓峰,孙建锋,严毅,等. 反射层析激光雷达小系统成像模拟[J].光学学报,2010,30(3):747-752.
[14] 李芳菲,张珂殊,龚强. 无扫描三维成像激光雷达原理分析与成像仿真[J]. 科技导报,2009,27(8): 19-22.
[15] 刘燕. 高分辨率及新模式 SAR 成像算法研究[D].西安:西安电子科技大学,2012:27-82.
[16] 胡剑. 凝视成像三维激光雷达系统的研究[D].杭州:浙江大学,2013:19-45.
A Integral Algorithm of Imaging Virtual 2D Lidar
Bu Yan ,Shen Jun,Zhang Hua,Li Zhixiong,Shi Sizong
(College of Information Engineering, Southwest University of Science and Technology,Mianyang621000,China)
Virtual two-dimensional (2D) lidar is part of the expansion of the lidar applications. 2D laser radar simulation process of detecting obstacles is based on point cloud features of 3D scene. The analytical solutions are obtained by integral equations based on light conduction characteristics of lidar map generated in a multi-barrier scene,then virtual two-dimensional (2D) lidar is achieved with the joint program of Visual C # and AutoCAD . Experimental results show that the virtual lidar can extract the location and distance information of objects from the 3D scene accurately comparing with real 2D lidar.
lidar; virtual; image integral; scene scanning
1671-4598(2016)04-0152-03DOI:10.16526/j.cnki.11-4762/tp.2016.04.045
TP391
A
2015-10-08;
2015-11-20。
西南科技大学研究生创新基金(15ycx119);四川省科技创新苗子工程(2015024)。
卜燕(1990-),女,四川内江人,硕士研究生,主要从事激光传感器方向的研究。
