双余度永磁直流无刷电机设计
2016-10-31郗珂庆郭炳岐高俊丽
郗珂庆,胡 昊,郭炳岐,高俊丽
(西安航天动力测控技术研究所 微特电机事业部技术中心,陕西 西安 710025)
双余度永磁直流无刷电机设计
郗珂庆,胡昊,郭炳岐,高俊丽
(西安航天动力测控技术研究所 微特电机事业部技术中心,陕西 西安 710025)
为了提高系统的可靠性及安全性,将双余度技术引入到永磁直流无刷电机设计之中,并指出了双余度电机设计的约束条件及通用设计方法。最后,通过工程实例设计出了两种绕组分配形式,经过仿真与实验验证,达到了预期的效果,并与理论分析结果相吻合,证明了该双余度设计方法的有效性。
双余度;永磁直流无刷电机;绕组分配;并联式
0 引言
在航空航天领域,系统的可靠性和安全性是需要关注的重点之一。为了提高系统的可靠性及安全性,一般会采用多余度的配置方式,即通过为系统增加多重的资源配置,实现对多重资源的合理管理,以期提高产品和系统的可靠性[1-3]。永磁直流无刷电机,一种执行机构,广泛地被应用于伺服驱动系统和传动系统中,其可靠性对整个系统的正常运行有着至关重要的影响。
因此,深入地了解并掌握多余度永磁直流电机设计技术愈发显得重要,而双余度电机是余度技术中最基本、也是最重要的一种,得到了一定领域的运用。
1 双余度永磁直流无刷电机的基本结构形式
双余度永磁直流无刷电机已经取得了成功运用[4-6]。传统的双余度的做法就是采用两台电机并联运行,即当一台电机出现故障时,可通过控制回路切换至备份电机,然而该方案具有体积大、结构复杂、成本高的特点[7]。相对于传统的双余度做法,一体式双余度电机是不错的选择。所谓的一体式是指电机双余度的实现是通过一台电机来完成的,具有结构简单(针对用户而言)、接口简单等特点。一体式双余度电机,其结构形式主要包括两种:一种是串联式结构双余度,一种是并联式结构双余度,两种形式的结构示意图分别如图1、图2所示。
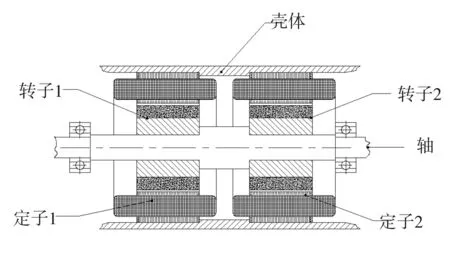
图1 串联式双余度电机结构示意图
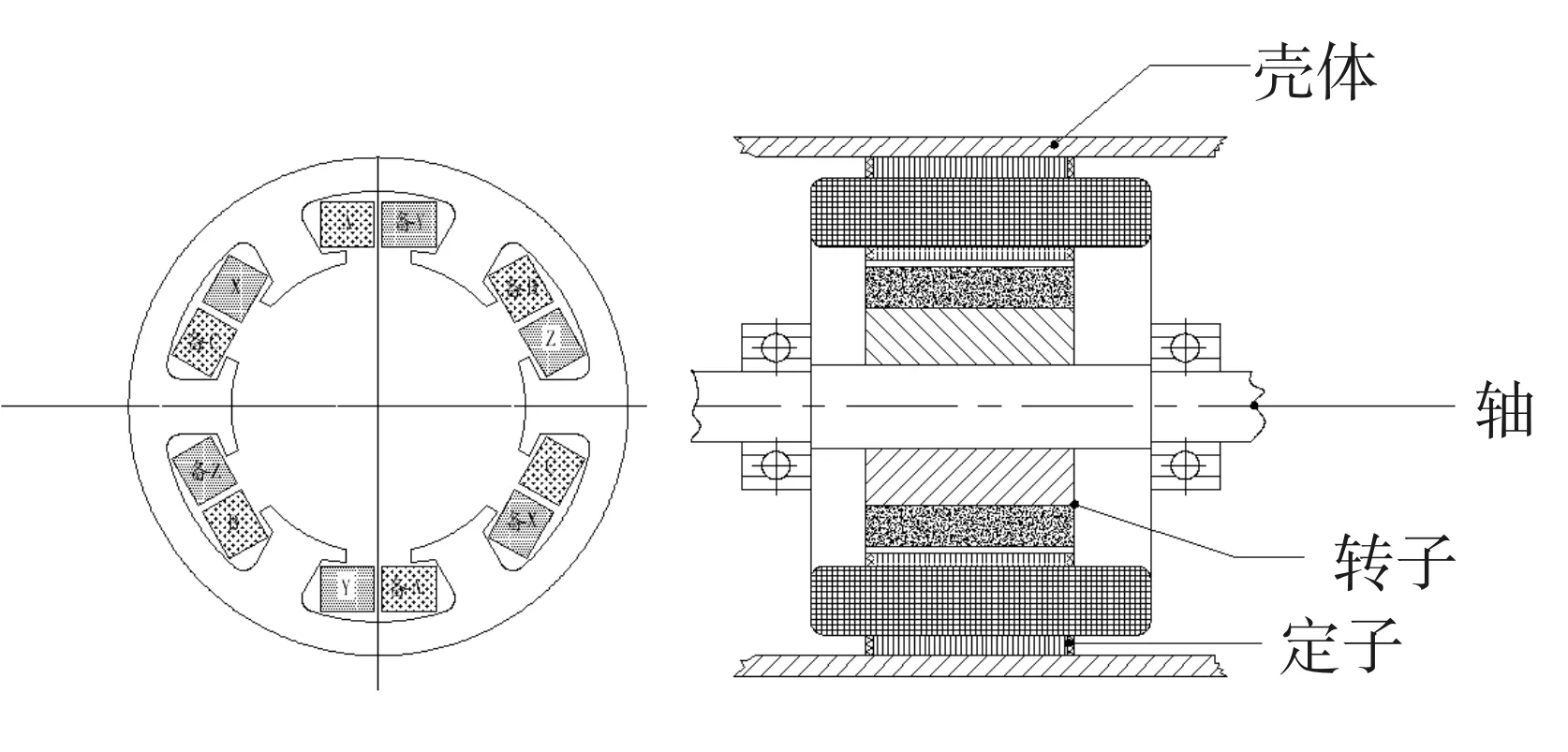
图2 并联式双余度电机结构示意图
由图1看出,串联式双余度结构的特点为:(1)该结构具有两套相同的定子(主要包括定子铁心及电枢绕组)、转子(主要包括磁钢及磁轭)及位置检测环节;(2)两套相同的定子通过同一个壳体安装,两套相同的转子共轴连接。由图2看出,并联式双余度结构的特点为:表面上看,该结构同单个独立电机的结构并没有什么不同,有一套定子,一套转子;然而,真正的区别在于该结构的定子铁心上嵌放着两套独立的电枢绕组,并配备两套相同的位置检测环节。
2 双余度永磁直流无刷电机设计方法
双余度结构分为串联式及并联式两种。串联式双余度电机的设计方法同通用的单个独立电机的设计方法一样,在此不做赘述。并联式双余度电机的设计涉及到电枢绕组的分配、位置检测环节的空间布局等棘手问题,是本文重点解决的问题。
2.1双余度电机设计需满足的约束条件
在进行双余度电机设计之前,选择合适的槽极比是有必要的。因为对于并联式双余度永磁直流无刷电机,其槽极比的选择不是随意的,而需要满足一定的约束条件。
首先,需满足单个独立电机槽极比选择的约束条件。根据每极每相槽数的定义,电机的绕组可分为整数槽绕组和分数槽绕组,尤其是分数槽绕组,其单元电机槽数Z0、极对数p0的选择不仅要考虑电机的相数,还需要考虑Z0/p0的可约分性、Z0的奇偶性等相关因素。
其次,在满足条件(1)的基础上,还需考虑电机是单层绕组还是双层绕组。对于单层绕组来说,电机绕组的个数是电机槽数的一半,为了能构成双余度,每相绕组个数N需满足以下条件:
N=Z/2m=2k=2,4,6,8,……(k为≥1的整数)
其中,Z为电机的槽数,m为电机的相数。
对于双层绕组来说,电机绕组的个数等同于电机的槽数,为了能构成双余度,每相绕组个数N需满足条件:
N=Z/m=2k=2,4,6, 8,……(k为≥1的整数)
2.2双余度电机绕组的分配
并联式双余度永磁直流无刷电机同单个独立电机的最大区别就是绕组的分配。电机绕组的分配主要涉及到绕组的分相及主、备绕组的分组问题,下面就以三相、4极12槽、双层绕组为例分别说明这两个问题。
2.2.1绕组的分相
对于4极12槽的电机,其槽距角为αm=360/Z=30°,则相邻两槽槽电动势相差的电角度为αe=αm×p=60°。其中,αm为相邻两槽槽距角(机械角度),αe为相邻两槽槽距角(电角度),p为极对数。基于计算,可以画出电机绕组的星行矢量图,如图3所示。
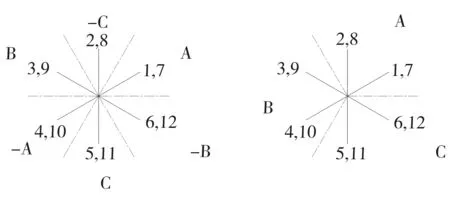
(a)60°相带绕组矢量图 (b)120°相带绕组矢量图
根据绕组的星形矢量图可以对绕组进行分相。通用的分相方法有两种,一种是120°相带,一种是60°相带。对于120°相带的分法,同一相的各个绕组转矩方向差别较大,合成的基波转矩受到的损失较大,即绕组利用系数较低。60°相带分法,其绕组利用系数虽然较120°相带的分法要高,但是在整极距条件下,绕组之间的过桥线会较长,嵌线的工艺难度会急剧增加,绕组的端部高度也会增加。
针对本例,两种相带分法的分相结果如表1所示。
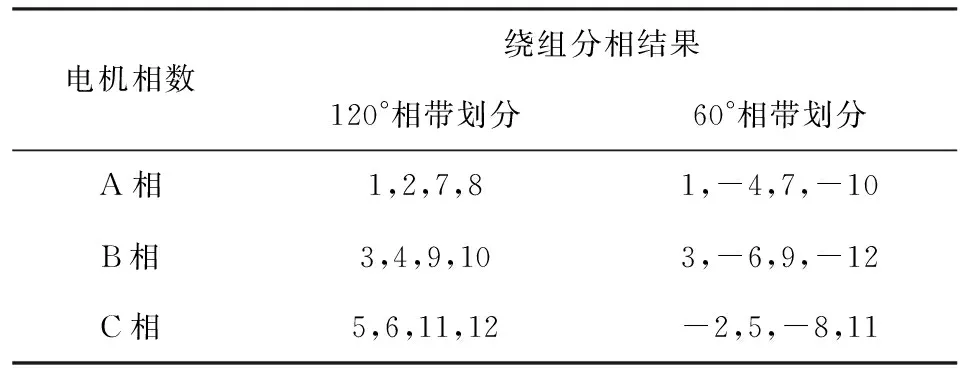
表1 绕组分相结果
*注:数字代表绕组的编号,负号表示绕组的绕制方向相反
2.2.2主、备绕组的分组
对于双余度电机,绕组有主、备之分。2.2.1节已经对绕组进行了分相,由分相结果可以看出,每相均有四个绕组组成,如何对每相绕组进行合理地分组,使之有主、备之分,是本小节要解决的问题。
对于分相后每相绕组的分组,要基于以下原则进行:
(1)分组后的每相绕组个数要一样,且绕制方向的分布要一样,目的是保证双余度主、备特性的对称性。例如针对本例,若采用60°相带分法,分组后的每相绕组由一个正向绕制的线圈和一个反向绕制的线圈,即分组后的每相绕组个数为2。
(2)电机绕组的空间分布应具有对称性。例如,对于三相电机来说,分组后的主、备绕组其任意两相互差120°的空间机械角度。
(3)要对电机的性能指标、绕组的端部高度、嵌线的工艺难度等多种因素加以考虑,选择出合适的极距。
(4)根据指标要求的传感器信号序列及绕组的通电顺序选择恰当的绕制方向。
针对本例,主、备绕组的一类分组结果如表2所示。
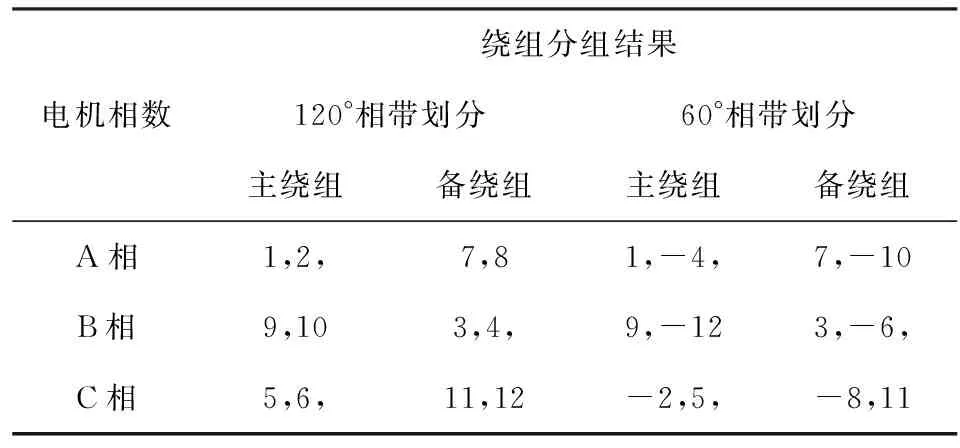
表2 绕组分组结果
*注:数字代表绕组的编号,负号表示绕组的绕制方向相反
根据表2,就可以画出绕组展开图,如图4所示。
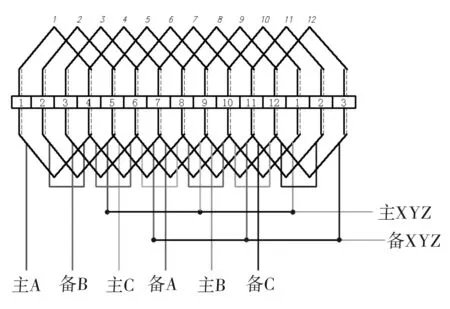
(a)120°相带绕组展开图(整极距)
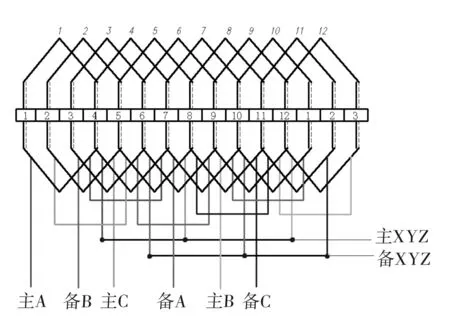
(b)60°相带绕组展开图(整极距)
2.3双余度电机位置检测环节的设计
永磁直流无刷电机是通过电子换相来保证连续转矩输出的。常用的电子换相元器件有两种:一类是霍尔传感器,一类是旋转变压器。霍尔传感器只能检测有限个离散的转子位置点信息,例如,三相六状态的工作方式就可以通过三个霍尔检测出六个换向点时刻,因此该方法检测转子位置的分辨率要低,成本也要低。旋转变压器能连续检测转子位置,具有分辨率高、成本高的特点。对于双余度电机位置检测环节的设计,可以从下面几个方面考虑:
(1)采用单个旋转变压器来实行对主、备绕组的切换。为了保证电机主、备性能的对称性,且避免主、备绕组切换时对软件中初始电角度的更改,可通过让主、备绕组相差360°的电角度的方式来实现。
(2)采用两个旋转变压器来实行对主、备绕组的切换。在这种情况下,相同型号的两种旋转变压器的固定、连接结构是设计时需重点考虑的问题。在该结构设计中,设计者不仅需要满足技术指标的要求,还需考虑旋转变压器安装、拆除的简洁及旋变调试的方便性。
(3)采用两套霍尔元器件来实行对主、备绕组的切换。在该方案中,一套霍尔对应于一套绕组。对于任意一套绕组,其自然换相点的相对位置是固定的,即霍尔位置传感器与电机绕组存在者严格的对应关系。电机的主、备绕组相差多少的电角度,两套传感器也应相差对应的电角度。
总之,由于电机绕组与位置检测环节的自然换相点存在着固定的对应位置关系,因此,不论对于串联式还是并联式,一旦三相绕组A、B、C的分布确定,位置检测环节的相对位置也就确定了。故而,一旦解决绕组分配及位置检测环节设计问题,并联式双余度电机设计同串联式双余度电机设计、单个独立电机的设计没有本质区别。
3 双余度直流无刷电机系统仿真实例
依据某一项目背景,通过一个具体的仿真实例来说明2.2节中两种相带划分对双余度直流无刷电机性能影响。
3.1电机设计要求及相关参数
主要的设计指标与设计参数如表3所示。
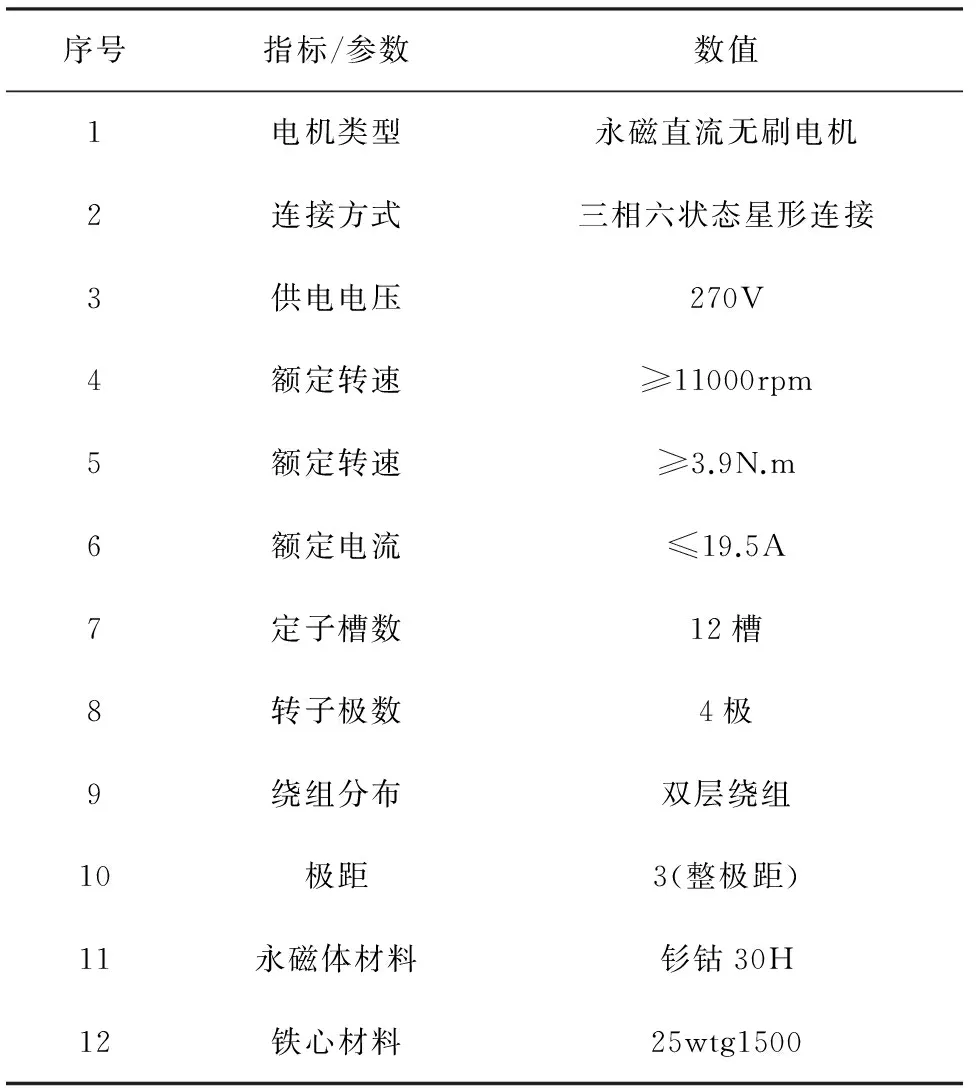
表3 双余度永磁直流无刷电机相关设计指标及设计参数
3.2仿真结果
120°相带与60°相带的仿真结果如图5~图7所示,图中点划线是120°相带仿真结果,实线是60°相带仿真结果。
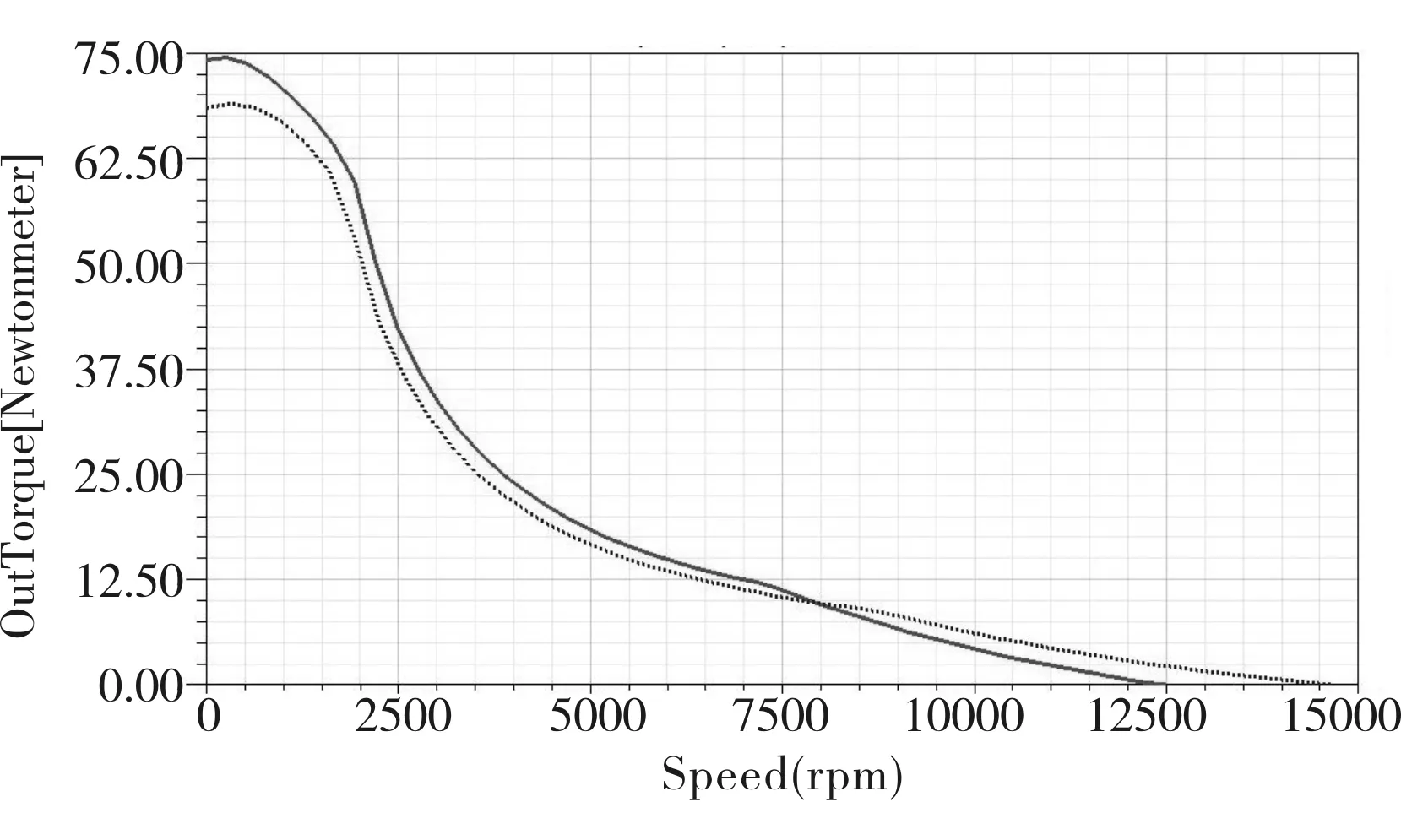
图5 电机的转矩-速度曲线图
图5是两种分组方法所得出的转矩-速度曲线图,由图可以看出,120°相带比60°相带空载转速要高(n0_120=14885rpm,n0_60=12685rpm,n0_60/ n0_120=0.852),这是由于两种分法的电机分布系数不同造成的。同理,由于60°相带的分布系数要高,会造成其堵转转矩比120°相带的堵转转矩要大。
图6和图7分别是电机在额定点状况下的转矩-时间、A相电流-时间的变化曲线。由图可以明显看出,120°相带相带分法比60°相带分法的转矩波动要小,且超前一定量的电角度,这与分析是相吻合的。
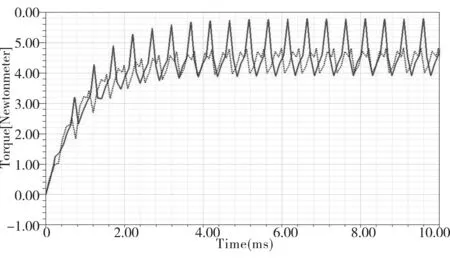
图6 额定点情况下电机转矩随时间变化曲线
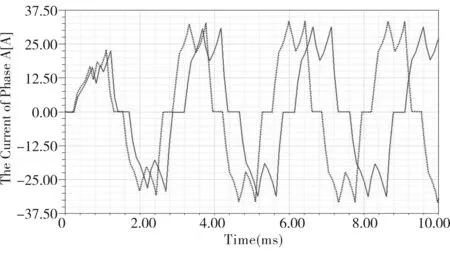
图7 额定点情况下电机A相电流随时间变化曲线
综上可知,电机的主、备绕组两种分法均能满足技术指标的要求,但实际过程中,具体选用哪种分组方法还会受空间尺寸限制、嵌线难度、转矩波动等多方面因素影响。
4 结语
双余度技术是提高电机可靠性的一种很有效的方法,其具有重要的应用意义及广泛的应用前景。一体式双余度电机结构上主要有串联式和并联式两种。串联式双余度电机的设计思路简单,同单个独立电机的设计思路一样,但为了保证主、备绕组性能的对称性,其结构设计、工艺实现相对较复杂;并联式双余度电机克服了串联式电机工艺复杂性的缺点,但难点在于绕组的分配问题,故对于并联式双余度电机来说,一旦掌握了绕组分配方法,双余度电机设计就迎刃而解。此外,双余度电机技术在余度管理策略、系统转矩均衡性等方面还面临着一些问题,需要更深一步的展开研究。
[1] 刘卫国,马瑞卿.双余度直流无刷电机控制系统[C]//中国电子学会元件分会.2006年中国电子学会第十四届电子元件学术年会论文集.2006:373-376.
[2] 马瑞卿,刘卫国,解恩.双余度无刷电动机位置伺服系统仿真与试验[J].中国电机工程学报,2008,28(18):98-103.
[3] 刘卫国,马瑞卿.双余度无刷直流电机控制系统[J].电气技术,2006(7):11-13.
[4] Guo H,Wang W,Xing W,et al.Design of Electrical/Mechanical Hybrid 4-Redundancy Brushless DC Torque Motor[J].Chinese Journal of Aeronautics,2010,23(2):211-215.
[5] 王慧娟.双余度电动伺服舵机系统设计[D].南京:南京航空航天大学,2010.
[6] 陆军,张元国,王长路.电动舵机余度技术概述[J].机械传动,2010,34(3):92-95.
[7] 付朝阳,刘景林,金英汉.双余度永磁无刷直流电机设计与实验研究[J].西北工业大学学报,2012,30(5):724-728.
[责任编辑、校对:郝杰]
A Practical Design of Permanent Magnet Brushless DC Motor (PMBLDCM) on Dual-redundancy
XIKe-qing,HUHao,GUOBing-qi,GAOJun-li
(Special Micro-motor BU Technology Center,Xi'an Aerospace Propulsion Testing Technology Research Institution,Xi'an 710025,China)
In order to improve the reliability and safety of the system,the redundancy technology is applied in the design of PMBLDCM.Then,some relevant constraint conditions and common design methods are put forward in this paper.In addition,two sets of winding arrangement are designed by means of the implementation of practical engineering projects.Through the simulation and experimental validation,the desired effect consistent with the results of theoretical analysis is achieved,thus proving the effectiveness of the proposed design method of the dual-redundancy.
dual-redundancy;PMBLDCM;winding arrangement;parallel connection
2016-08-25
郗珂庆(1977-),男,高级工程师,主要从事电机本体、伺服系统的驱动控制理论工程技术研究。
TM33
A
1008-9233(2016)05-0051-05
