胎儿颜面部三维超声基准标准切面自动校对系统的研究*
2016-10-29刘盛锋卓柳倪东
刘盛锋,卓柳,倪东△
(1.哈尔滨理工大学自动化学院,哈尔滨150080;2.医学超声关键技术国家地方联合工程实验室,广东省生物医学信息检测与超声成像重点实验室,深圳大学生物医学工程系,深圳518060)
1 引 言
超声检查对胎儿和孕妇无副作用,诊断准确,是目前产前诊断与缺陷儿筛查的首选影像检查方法。胎儿颜面部检查是一项重要的超声产前检查项目。其中,包含重要解剖结构的标准切面的定位是超声产前诊断的关键步骤之一。目前临床超声产前诊断主要有二维超声和三维超声。与二维超声相比,三维超声具有表面模式、三平面正交模式和多平面模式,可提供更加全面可靠的信息,更好的评估解剖结构,已广泛应用于临床胎儿颜面部的诊断。由于宫内胎儿胎位的不确定性,医生从胎儿颜面部三维超声体数据中手动校对胎儿胎位,手动定位三正交的基准标准切面是非常困难和耗时的。
近年来,吸引了许多研究者对三维超声自动提取标准切面的兴趣。Carneiro等[1]提出通过精确定位三维胎儿脑部体数据中的解剖结构的位置、方向和大小,来定位其解剖结构的标准切面。采用类似的方法,Lu等[2]研究了心脏三维超声数据中标准切面的自动提取方法。Feng等人[3],针对三维超声的表面模式,提出了从三维超声胎儿颜面部体数据中自动寻找胎儿面部的最优视角,结合3D人脸表面和2D面部轮廓精确检测3D人脸。Cuingnet等人[4]针对三维超声脑部体数据,提出将胎儿脑部解剖结构头骨、正中矢状面和眼球轨道作为参考,重新建立脑部体数据的正交坐标系和原点,最终确定脑部解剖结构的标准切面。Chen等人[5]针对三维超声胎儿颅脑轮廓分割进行了研究。
迄今为止,关于三维超声标准切面搜索研究已取得了一些进展,但就我们所知,尚无一个方法是针对从颜面部体数据中自动获取重要解剖结构的标准切面。另一方面,不管是临床研究还是计算机辅助,针对胎儿颅脑的研究,最受关注的解剖结构为双眼球[4-6]和面部轮廓[3-4,7-8]。双眼球在超声图像中特异性强,对称存在,相比其他解剖结构易识别,且受胎儿胎位、胎龄的影响小。但是双眼球灰度信息较为单一,在超声图像中存在较多与其表观类似的区域,文献[4-5]仅用双眼球本身来定位,鲁棒性有待提高。另一方面,正中矢状面上的面部轮廓线亦较易识别,可反应颜面部的本质特性,临床上往往对其进行多个生物学参数测量[9-12],以判断是否有颜面部畸形。
本研究提出一种三维超声胎儿颜面部三正交基准标准切面自动校对系统,可减少医生工作量,提高产前超声诊断的标准化水平。首先,根据平面上一点和法向量确定平面的原理,即通过自动检测双眼球,并基于对称性双眼球轨道和轨道中点定位正中矢状面;然后,通过自动检测正中矢状面上的面部轮廓线定位面额冠状切面;最后,根据双眼球和三平面正交关系校对水平横切面。从而重新定义胎儿颜面部的三维基向量。
2 方法
2.1 眼球自动检测
在三维超声颜面部体数据中,眼球能反应胎儿颜面部的本质特征:眼球受胎儿体位、大小和图像质量等变化影响小;超声眼球表现为中央极小的无回声区,眼球周边为一完整的、厚度均匀的强回声,这一强回声壁由眼框骨和眼睑组成,见图1;眼球具有对称性,可确定颜面部解剖结构的参考方向,校对正中矢状面,所以最先检测双眼球的位置。但是双眼球灰度信息较为单一,在超声图像中存在较多与其表观类似的区域,可能降低自动检测的鲁棒性。在超声图像中,蝶骨位于眼球下方,具有对称性,其声像表现为中央极小的强回声区,周边为厚度均匀的弱回声区,具有较强的标识性。因此,可通过联合眼球下方的蝶骨增加眼球自动检测的鲁棒性。
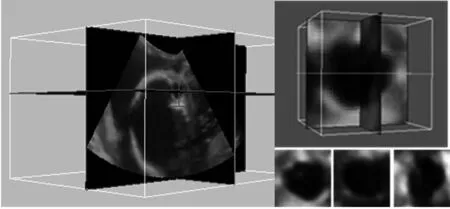
图1 3D超声眼球灰度示意图Fig 1 Diagram of 3D ultrasound eyeballs gray images
考虑到超声图像中典型眼球和蝶骨具有旋转不变的特性的表观,本研究拟将2D Haar-like特征[14]扩展到三维空间来描述训练样本的表观。2D Haar-like特征的基本原理是:特征值定义为特征模板中不同区域的像素灰度值之差。本研究定义了10种形式的3D Haar-like特征,见图2。
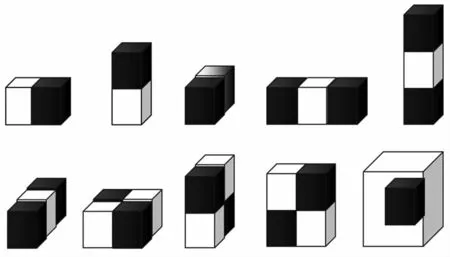
图2 3D Haar-like特征模板示意图Fig 2 Diagram of 3D Haar-like feature templates
为了更有效的计算滤波器的值,本研究提出了与计算2D Haar-like型特征的“积分图”方法类似的方法“积分体”。“积分体”和“积分图”的区别在于“积分体”是在三维空间中计算出来的。其具体计算过程如下:
(1)“积分体”是一个大小与体数据相同的三维矩阵,对于“积分体”上的某一点(x,y,z)来说,其值是时空体中所有序号小于等于当前位置的所有点的像素亮度和:

其中 iv(x,y,z)表示积分体(x,y,z)位置的值,i(x′,y′,z′)表示体数据中(x′,y′,z′)位置的值。(2)借助“积分体”的概念,任何一个立方体中的所有像素和可以通过7个加减操作计算出来。对于每一点(x,y,z)积分体的计算公式为:

每次计算特征值时,只需要计算顶点上的积分体值,这样可以大大减少计算时间[14-15]。
在机器学习的实际应用中,特征数量往往较多,其中可能存在不相关的特征,特征之间也可能存在相互依赖,容易导致如下后果:(1)特征个数越多,分析特征、训练模型所需的时间就越长。(2)特征个数越多,容易引起“维度灾难”,模型也会越复杂,其推广能力会下降。基于此,本研究将所有Haarlike总特征维数28318分成每1000维的特征子集,使用支持向量机 (support vector machine,SVM)分类器,然后利用每个特征子集对样本集进行分类,选取分类精度最高的特征子集做为最后的特征。
在获取最优特征子集后,即可分别训练眼球和蝶骨检测的SVM分类器;根据眼球与蝶骨位置关系空间不变性,采用眼球和蝶骨联合检测的方法;对所有眼球检测的预测点使用k-means聚类求得双眼球中心;最后,由双眼球中心所确定方向向量和双眼球中心连线的中心点,来定位正中矢状面。双眼球与正中矢状切面空间位置关系见图3。
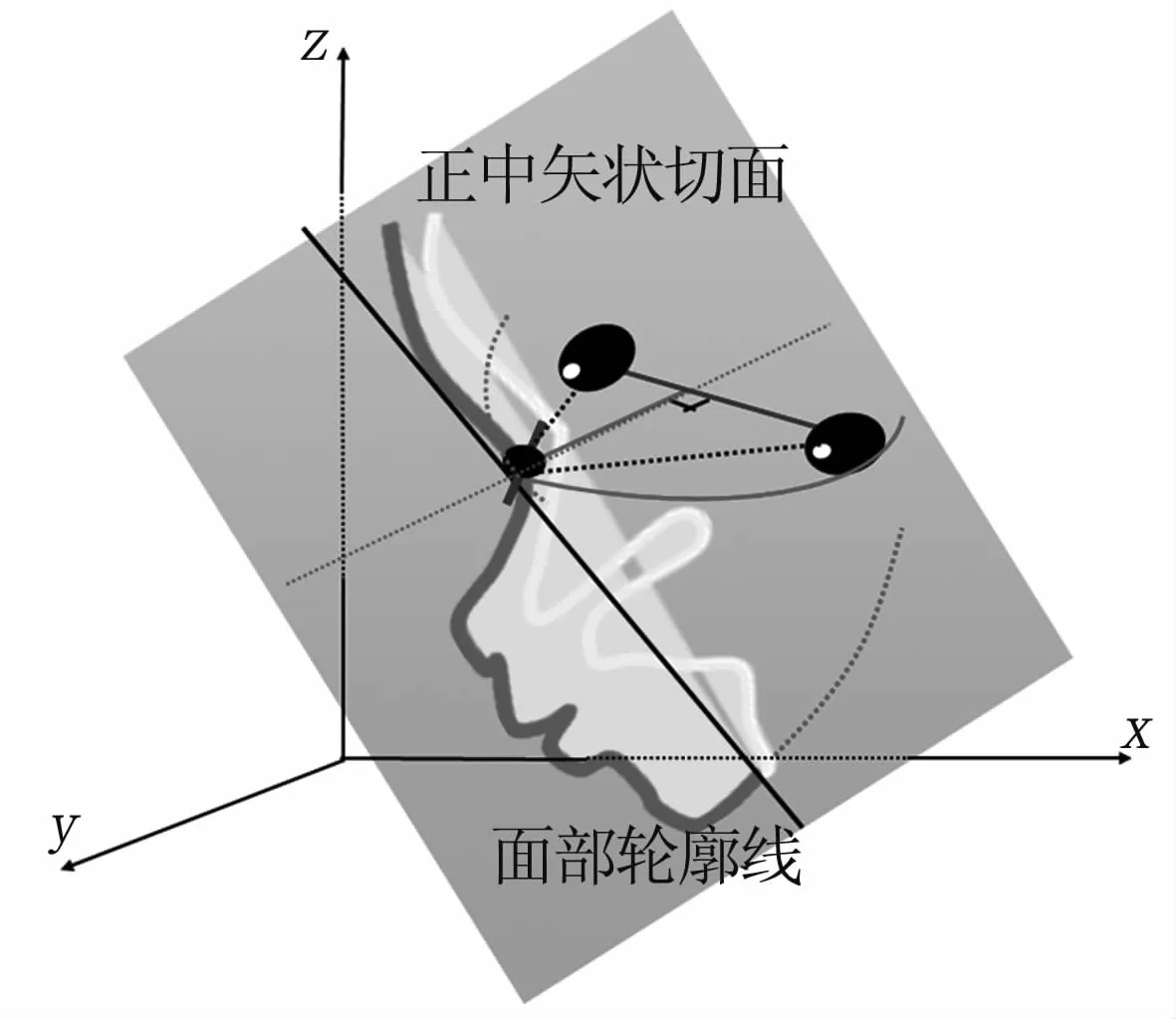
图3 双眼球与正中矢状切面空间位置关系示意图Fig 3 Diagram of the spatial relation between the eyeballs and the median sagittal plane
2.2 面部轮廓线自动检测
面部轮廓线自动检测的过程,也是求最优直线的过程包括三个部分:鼻骨位置、面部轮廓模型和最优面部轮廓线拟合。
在三维超声颜面部体数据中,面部轮廓能反应胎儿颜面部的本质特征:面部轮廓受胎儿体位、胎儿大小和图像质量等变化影响小,清楚可见,易获取;面部轮廓表现为成一定形状的强回声,区别于周围其他软组织,这一强回声壁由面额骨、鼻子、鼻骨和下巴皮肤、下颌骨组成;面额冠状切面通过面额骨、鼻骨和下额骨,与正中矢状面的交线为面部轮廓线,即鼻骨和下额骨的连线,定位面部轮廓线,从而校对面额冠状面。面部轮廓线及面部冠状切面超声图像见图4。
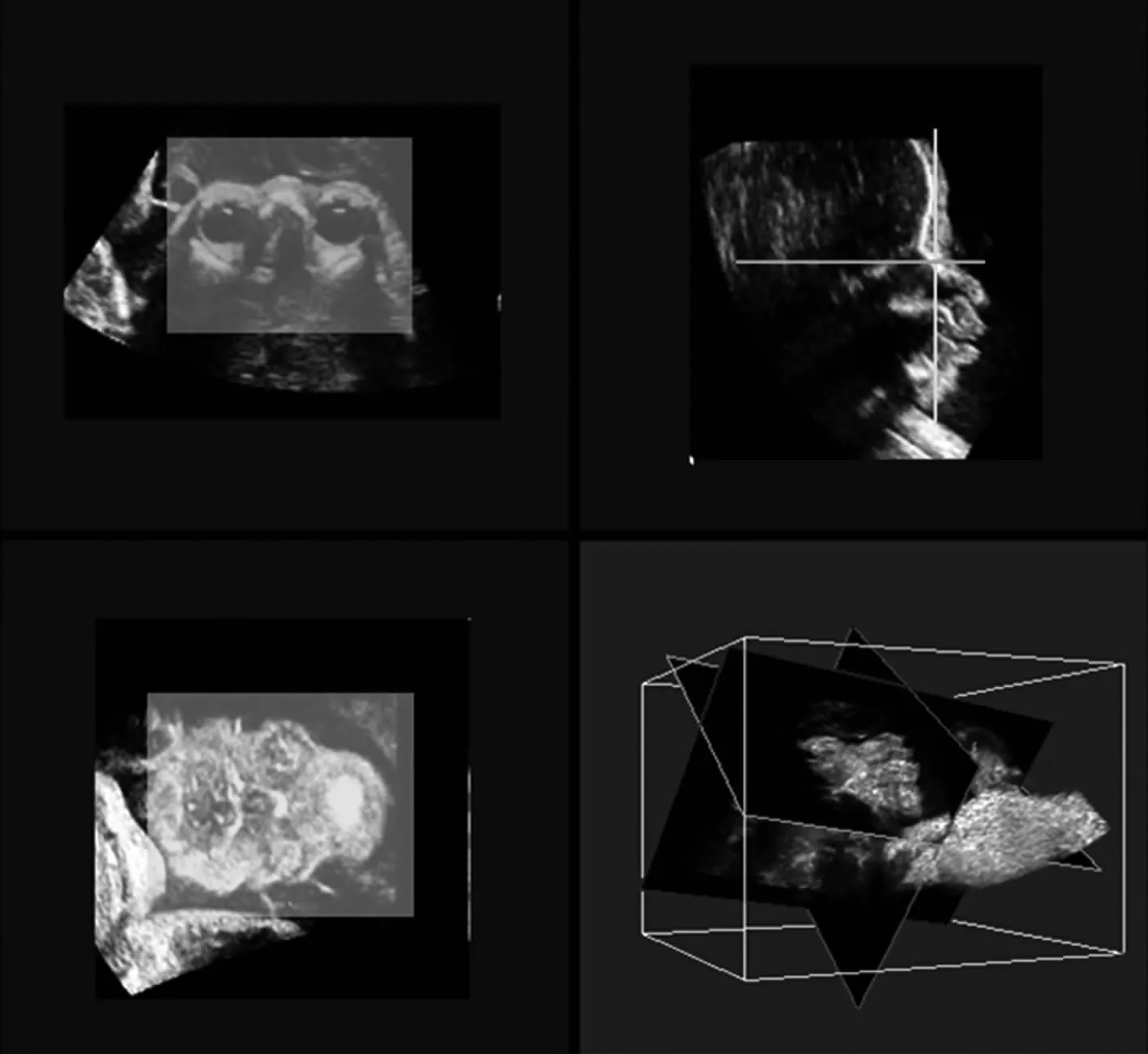
图4 面部轮廓线及面部冠状切面超声图像Fig 4 Ultrasound images of facial profile plane and facial coronary plane
正中矢状面、双眼球水平横切面、面额冠状切面之间成两两正交关系,相交于鼻骨[16]。鼻骨和双眼球具有固定的空间位置和大小比例关系:(1)鼻骨和双眼球成等腰三角形,鼻骨为顶点;(2)鼻骨到双眼球中心连线的距离d(如图(5a)的红色直线)即为等腰三角形的高;(3)双眼球中心之间的距离D(如图5(a)的蓝色直线),即为等腰三角形的底边;(4)等腰三角形的高和底边具有一定的比例关系,大概为d∶D=1∶4。所以,由双眼球中心连线即可粗略确定鼻骨位置。鼻骨初定位后,为后面的正中矢状面的面部轮廓区域分割进行了限制,可减少超声图像中宫内其他组织结构的噪声影响,提高分割的准确性。鼻骨-颜面部模型见图5。
Hough变换是图像处理中从图像中识别几何形状的基本方法之一。Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。本研究中是用来检测直线。
在根据鼻骨确定的面部轮廓区域中,进行kmeans聚类分割得到二值图,再进行Hough直线检测,检测到的多条直线集中分布在面部轮廓线区域,这是因为面部轮廓近似一条直线。根据Hough变换直线得到极坐标下的θ,便大大减少了面部轮廓线确定的范围,即已经确定了面部轮廓线的大致范围(θ1,θ2)。

图5 鼻骨-颜面部模型示意图a.模型示意图;b.面部比例示意图;c.鼻骨-眼球中心距离统计图Fig 5 Diagram of the nasal-facial model
然后采用模板匹配的方法对Hough直线检测确定的角度范围和初步鼻骨位置两个参数进行筛选,得到最佳的面部轮廓拟合直线方程,即为面部轮廓线。其过程是:首先,将多个胎儿正中矢状面上的面部轮廓区原图和对应的k-means分割二值图加权平均,得到平均模板图,其中模板大小为80×180。然后,对平均模板图阈值分割得到面部轮廓线二值模板图;最后,进行模板匹配,原则是,在已经确定的面部轮廓线大致范围内(θ1,θ2),将 Hough直线检测得到的二值图与面部轮廓线二值模板图进行运算再求和,得到和最大的匹配角度方向即为面部轮廓线的方向位置,再结合之前确定的鼻骨这个点,就可以精确拟合面部轮廓线。
面部轮廓线检测后,直接校对面额冠状切面。最后以鼻骨、双眼球、面部轮廓线为参考,重新定义胎儿颜面部三维空间坐标(x′,y′,z′,o′),鼻骨为新坐标系的原点o′,面部轮廓线为新坐标的z′轴,双眼球方向向量为新坐标的x′轴,鼻骨与双眼球轨道中心所在方向向量为新坐标的 y′轴,x′o′y′平面即为双眼球水平横切面,所以由此校对双眼球水平横切面。
2.3 评价方法
本研究对算法在眼球检测和三个基准标准切面和用户间可变性等方面进行了定量评估,为了便于作定量评价,基于VTK开发了一个交互式软件。用户可以从体数据里获取任意点的位置,记录点的坐标,还可以获取任意位置的切面,主要包括切面的法向量和中心点在内的参数信息。此外,还邀请了两位在胎儿颜面部超声检查方面有三年以上经验的超声医生(记为医生1和2)和三位超声医学影像专业的研究生(训练他们从体数据中标注三个基准标准切面;记为学生1,2和3),请他们标注最优的标准切面,并记录下这些切面的法向量和中心点等参数。在标注过程中,用户可以重复多次直到结果满意为止。
本研究用上述两位医生的平均结果作为评测的金标准:眼球中心点真实位置(坐标点)和三个基准标准切面的真实位置(切面的法向量和中心点)。其中,眼球真实位置用红色标注,三个标准切面用带有红色边线的平面标注。对于评价眼球检测结果的好坏,是通过评价自动检测眼球中心点和临床专家医生标注的实际位置的欧式距离。对于评价获取三个基准标准切面的好坏,主要采用两个指标:(1)手动获取与自动检测的切面之间的角度:

其中,nm表示手动获取切面的法向量,na表示自动获取切面的法向量。(2)两个平面之间的距离:

其中,bautomatic为体数据原点到自动获取切面中心点的距离,bmanual为体数据原点到手动获取切面中心点的距离。
3 实验内容与结果
3.1 实验数据
本研究使用的数据全部由深圳妇幼保健院超声科迈瑞DC-8机器上采集,包括经验丰富和新手医生采集的数据,数据孕周分布在20周到39周,主要集中在29周到32周之间。共采集了788个来自174个不同的胎儿体数据,体数据的平均大小为250×195×220(像素),两个像素相当于1 mm,每个胎儿有横切面和矢状面两种扫查方式获得的多个颜面部体数据。本研究使用来自134个胎儿的708个体数据做为训练,来自40个胎儿的80个体数据(其中矢状面扫查方式和水平横切面扫查方式各40个)做为检测。2D FP profile模板为20个胎儿的平均模板。所有的检测数据都能反应一般情况。
3.2 实验结果
主要通过平均误差、中间误差和标准偏差,定量得到自动检测的双侧眼球中心点和三个基准标准切面的真实位置与临床专家医生标注的实际位置误差分析结果分别见表1和表2。其中,表2中第一列的前三个指标分别为矢状、冠状和水平切面的角度,后三个为其对应切面间的距离。

表1 眼球检测的欧氏距离误差分析Table 1 Error analysis of Euclidean distance for eyeballs detection
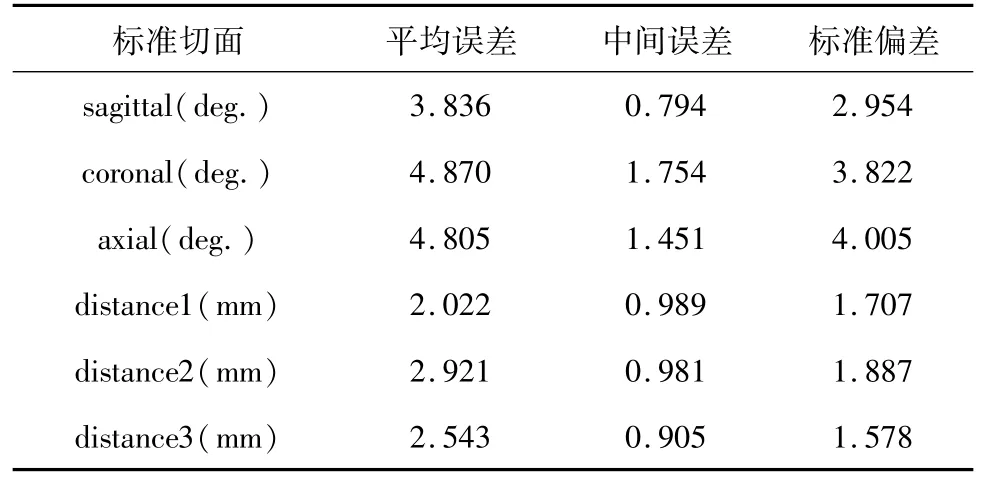
表2 三基准标准切面检测的误差分析Table 2 Error analysis of the three reference standard planes detection
为了验证用户间的可变性,表3给出了不同用户之间(包括医生与医生、医生与学生以及自动检测与医生)的误差比较。由此可知,自动检测与医生之间的误差小于医生与医生之间的误差,验证了本研究提出的方法自动获得的结果误差在用户间可变性变化范围内,可以减少用户间的差异。
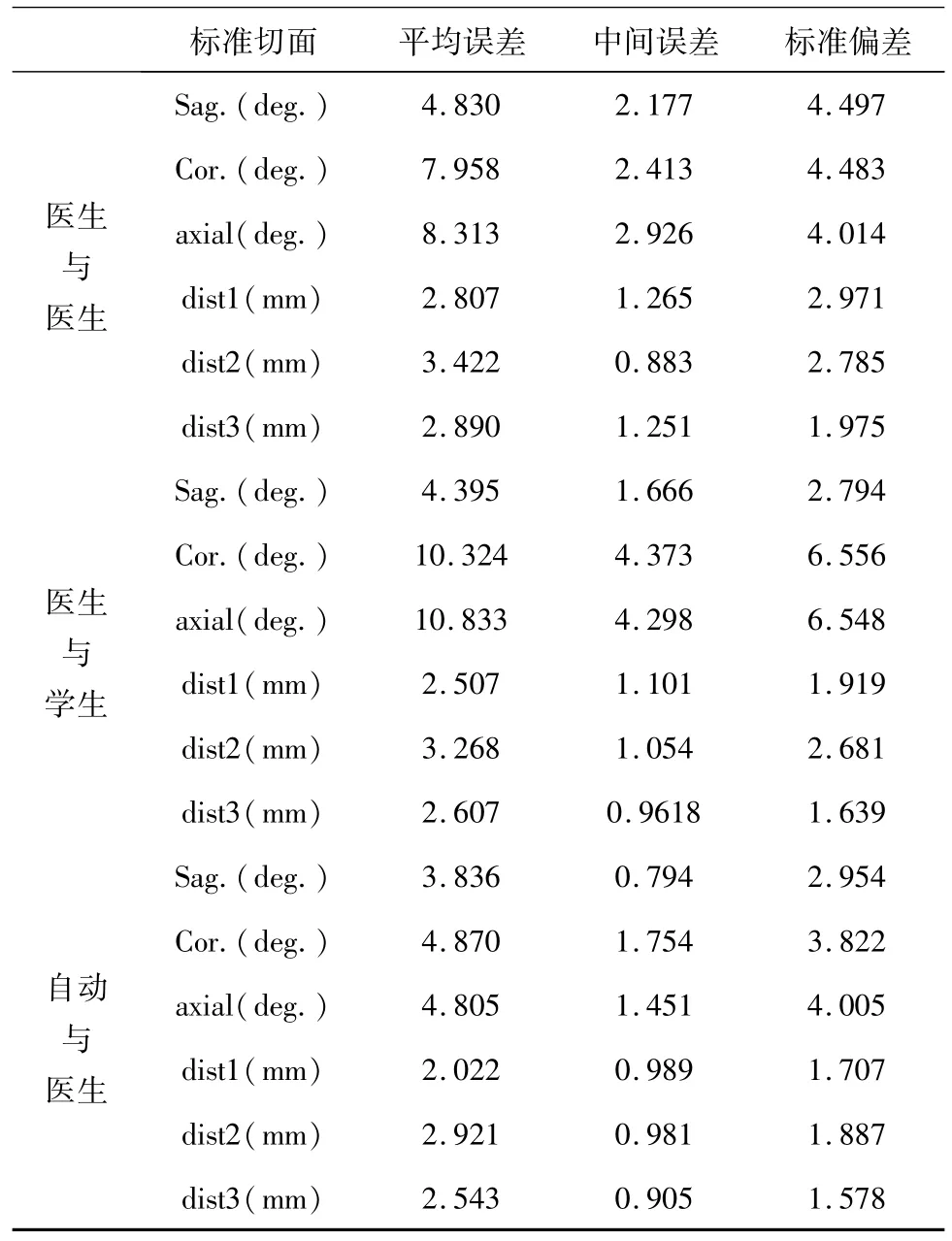
表3 不同用户间的误差比较Table 3 Error comparison between different users
4 结论
首次实现了三维超声中胎儿颜面部自动校对多基准标准切面导航系统。通过自动检测胎儿双眼球定位正中矢状面,进而通过自动检测正中矢状面上的面部轮廓线定位面额冠状切面,最后以鼻骨、双眼球和面部轮廓线为参考校对水平横切面,从而自动定义胎儿颜面部三维基准向量。实验表明,标准切面角度误差在2.541~4.601度之间,距离误差在0.739~1.000毫米之间。实验结果说明了本系统的可行性。