重型车辆液压辅助驱动系统的前馈+反馈复合控制
2016-10-29曾小华蒋渊德李高志宋大凤贺辉
曾小华 蒋渊德 李高志 宋大凤† 贺辉
(1.吉林大学 汽车仿真与控制国家重点实验室, 吉林 长春 130025;2. 广州汽车集团有限公司 汽车工程研究院, 广东 广州 510640)
重型车辆液压辅助驱动系统的前馈+反馈复合控制
曾小华1蒋渊德1李高志1宋大凤1†贺辉2
(1.吉林大学 汽车仿真与控制国家重点实验室, 吉林 长春 130025;2. 广州汽车集团有限公司 汽车工程研究院, 广东 广州 510640)

液压辅助驱动系统;前馈;反馈;重型车辆;牵引效率;仿真建模
重型商用车对动力性要求很高,且运行工况复杂,当车辆行驶于低附着路面时易出现打滑,导致牵引力不足[1-2].四驱构型具有大幅提高车辆动力性的潜能,但机械四驱构型有自重大、易产生寄生功率等缺点[3].与传统机械四驱车辆不同,液压辅助驱动系统通过在车辆前轮轮毂内安装液压马达,将车辆改装为四驱构型,具有功率密度高、体积小、质量轻等优点[4-5].当前,国内外对液压驱动系统的研究主要集中于液压混合动力系统[6-8].国外较早就开始研究液压辅助驱动系统[9-11],而国内在这一领域的研究较少.
为满足车辆的复杂工况随机性,液压辅助驱动系统需满足不同行驶工况要求[12].其中,系统中变量泵的排量控制是核心控制内容.如果变量泵的排量控制不当,车辆将出现前、后轮运动干涉,甚至出现前轮阻碍车辆行驶等问题.贺辉等[13]提出了一种基于最佳滑移率的PID控制算法用于调节变量泵,可使重型卡车在坏路面上获得良好的牵引力.然而,算法的工况适应性较差,难以在各种路面条件下理想工作.
根据地面车辆理论[14],若前、后轮的尺寸相同, 当前、后轮的转速相等时,车辆牵引效率最高.基于此,文中首先设计基于挡位的前馈控制算法,用于计算变量泵斜盘摆角的稳态值;然后考虑液压系统本身存在的泄漏、系统参数动态变化等因素[15-16],设计了基于PI算法的反馈控制;最后通过复合控制来精确修正泵的斜盘摆角,以使前轮转速精确地跟随后轮转速,进而提高车辆牵引效率.
文中通过建立机械传动和液压传动的动力学模型,提出了前馈+反馈复合控制策略,基于Simulink和AMESim软件建立该控制策略模型和车辆系统模型,并进行联合仿真,实现对液压辅助驱动重型卡车的牵引力和爬坡性能的仿真验证.同时利用所开发的样车进行实车试验测试,以验证该复合控制策略的可行性和有效性.
1 系统方案
基于技术成熟的三轴重型商用车设计液压辅助驱动系统,系统主要包括液压轮毂马达、液压变量泵、控制系统工作模式的液压阀组及发动机动力输出装置(PTO).由于车辆的中、后轴采用平衡悬架,所以水平路面上中、后轮的受力情况可视为基本相同.为突出文中研究的关键点,将该三轴重型车简化为两轴构型,简化后的车辆结构如图1所示.图中,ECU表示发动机控制单元;HCU表示液压控制单元;VCU表示整车控制器.
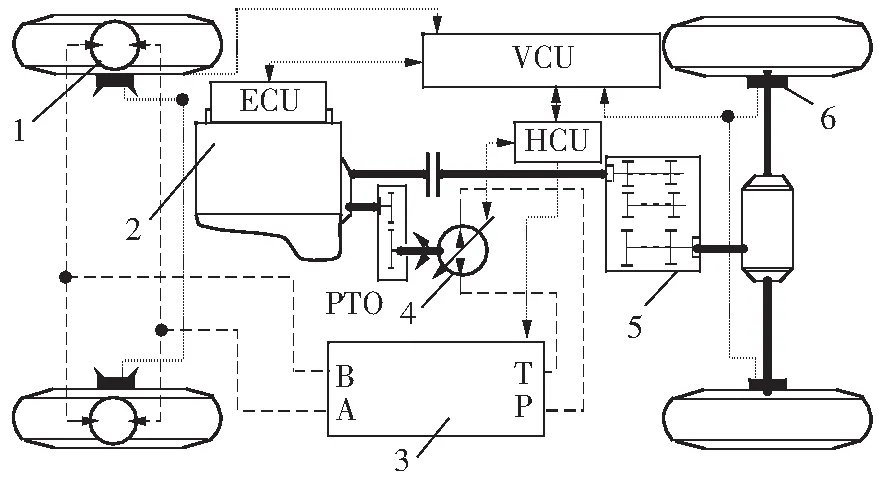
机械连接 管路连接 电连接
2 动力传动系统建模
动力传动系统包括机械传动系统和液压驱动系统,建立动力系统数学模型可对比研究液压辅助驱动的作用方式和驱动特性.
2.1机械传动系统建模
文中主要关注液压辅助驱动系统对整车的作用效果,因此可采用简化的发动机模型.文中选取一阶惯性环节表示,其转速的动力学方程为
(1)
式中,Ie为发动机曲轴和离合器主动盘的转动惯量,Te为发动机输出扭矩,ωe为发动机速度,Ce为发动机曲轴的阻尼系数,Tc为离合器传递的力矩,Tp为取力器输出到变量泵的力矩.
通过台架试验采集发动机的特性曲线,然后建立发动机数据模型.发动机输出扭矩Te为发动机转速ωe和发动机节气门开度θth的函数:
Te=Te(ωe,θth)
(2)
把由离合器从动盘到后轮的传动部分看作一个整体系统,离合器从动盘和变速箱输入轴的转速ωc表达式为
(3)
(4)
式中,Mbr为车轮制动力矩,Fxr为后轮输出牵引力,Fzr为后轮垂直负载, f为车轮和路面滚阻系数,R为车轮半径,ig、i0分别为变速箱、主减速器传动比,Iv为离合器从动盘到后轮传动系统的等效转动惯量,Ic为离合器从动盘的转动惯量,Ig、I0、Iwr分别为变速箱、主减速器、后车轮的转动惯量.
后轮转速ωr的计算式如下:
(5)
2.2液压辅助驱动系统建模
由于连接发动机动力输出装置和变量泵输入轴的传动比为1,所以泵转速np和发动机转速ne相同,即
np=ne
(6)
考虑到变量泵存在泄漏,泵的流量qp、输出功率Npo、输入扭矩Tp的计算式如下:
(7)
(8)
(9)
式中,Vp,max为变量泵最大排量,α为斜盘摆角值,Δpp为泵进出油口的压差,ηp,v为液压泵容积效率.
假设管道和液压控制阀的流量及压力损失非常小,则可以认为从泵流向两个马达的流量相同,所以每个马达的转速nm和输出转矩Tm分别为
(10)
(11)
式中,Vm为马达排量,Δpm为马达进出油口的压差,ηm,v为马达容积效率.
车辆前轮转速ωf为
(12)
式中,Mbf为前轮制动力矩,Im、Iwf分别为两马达、两前轮转动惯量,Fxf为前轮输出牵引力,Fzf为前轮垂直负载.
2.3整车动力系统建模
前轮滑转率sf、后轮滑转率sr分别为
(13)
(14)
式中,v为整车瞬时速度.
通过式(13)、(14)计算得到前、后轮的滑转率,采用14自由度整车动力学模型,利用Gim轮胎模型可分别求得车辆前、后轮与路面间的纵向力Ft1和Ft2,则车辆可获得的牵引力为
Ft=Ft1+Ft2
(15)
车辆的行驶方程式为
Ft=Ff+Fw+Fi+Fj
(16)式中,Ff=fmgcosβ,Fw=CDAv2/21.15,Fi=mgsinβ, Fj=ma,m为车辆质量,g为重力加速度,β为道路坡度角,CD为风阻系数,A为迎风面积,a为车辆加速度.
3 复合控制策略开发
根据地面车辆理论,四轮驱动车辆的滑转效率η为
(17)
式中,Kd为驱动力分配系数.
为求得滑转效率最大值,取η对Kd的偏导数并令其为0,即
(18)
显然,式(18)只有在前轮或后轮的滑转率为100%,或前、后轮的滑转率相等时才成立.当前轮或后轮的滑转率达到100%时,车辆根本无法向前运动,牵引效率等于0.因此,只有当前、后轮的滑转率相等时,才可获得整车的最佳滑转效率.在本系统中,可通过调节变量泵的排量对前轮转速进行调节.因此,为使车辆达到最佳牵引效率,文中提出了前轮转速跟随后轮转速的控制策略.
3.1前馈控制策略开发
由于前轮轮毂马达转速nm与前轮转速nf相同,故当后轮转速为nr时,前轮轮毂马达的目标转速为
nm=nf
(19)
根据流量连续方程,泵和马达的流量满足:
αnpVp,max=2nmVm
(20)
故可以计算出变排量泵的期望摆角α:
(21)
(22)
(23)
根据式(21)-(23)得到泵的斜盘摆角值为
α=2VmiPTO/(igi0Vp,max)
(24)
在式(24)中,i0、iPTO、Vm、Vp,max是常量,故α对应于ig是一个确定的值,不论后轮转速如何变化,理论上前轮转速能够跟随后轮的转速.在本研究中,挡位1、2、3、4、5对应的泵排量分别为0.30、0.38、0.49、0.63、0.81.
根据上述分析建立整车模型及前馈开环控制器,并进行前馈控制仿真,结果如图2所示.结果表明,在挡位切换时前轮马达旁通,动力中断,换挡结束后可以快速响应并跟随,但前、后轮始终存在转速差,整车的牵引效率不佳,不利于整车牵引性能的提高.另外,前馈控制器无法消除因外部干扰造成的误差,因此,需要进一步改进.
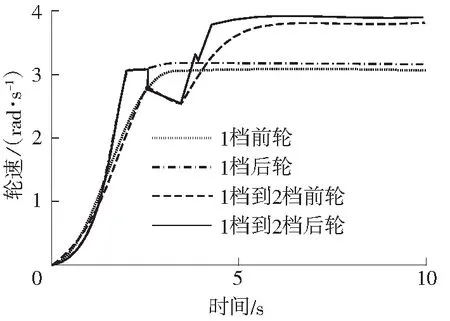
图2 前、后轮转速曲线
3.2前馈+反馈复合控制策略
由于液压元件的泄漏和溢流而使前轮和后轮转速之间产生的差别是难以预测的,上述设计的前馈控制策略无法消除因外部干扰造成的误差,甚至可能导致前轮转速无法跟随后轮转速,而反馈控制能够显著提高控制精度.因此,文中基于PI算法的反馈控制来修正斜盘摆角值α,设计前馈+反馈复合控制器.反馈控制器的输入信号定义为目标后轮和实际前轮的转速差:
e(t)=nr-nf
(25)
连续控制系统的PID控制算法可以描述为
式中,kp为控制器比例常数,Ti为控制器积分时间,Td为控制器微分时间.
离散化的PID算法可以描述为
(27)
式中,T为样本时间.式(27)可写成
u(k)=u(k-1)+Aee(k)-Bee(k-1)+
Cee(k-2)
(28)
式中,Ae=kp+kpT/Ti+kpTd/T,Be=kp+2kpTd/T,Ce=kpTd/T.
最终,前馈+反馈控制器的输出是泵斜盘摆角的修正值,即
α=αf+αb
(29)
式中,αf为前馈控制器输出的斜盘摆角值,αb为反馈控制器输出的斜盘摆角值.
整个复合控制的结构如图3所示.
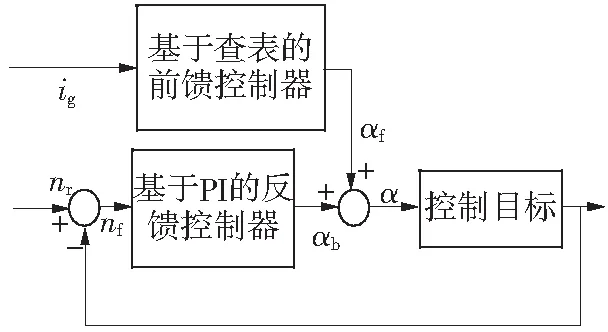
图3 前馈+反馈复合控制策略的结构
基于所建立的整车模型设计前馈+反馈复合控制器进行仿真测试,结果如图4所示.可以看出,前轮转速可以很好地跟随后轮转速.将前馈控制器和前馈+反馈复合控制器作用下的车辆前、后轮轮速列于表1,对比可知,使用前馈+反馈控制器后静差有明显的降低.
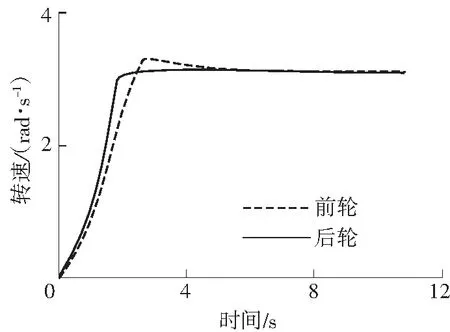
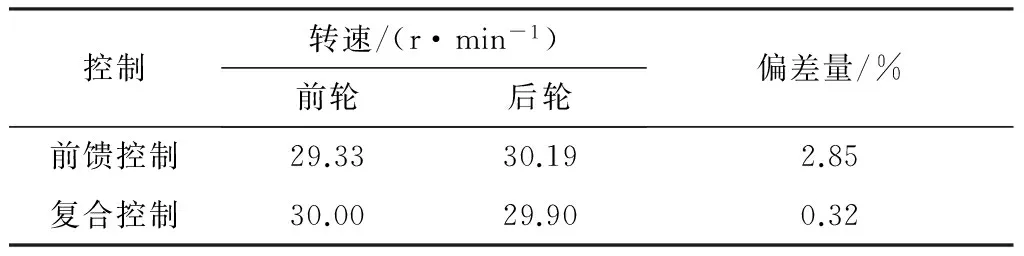
图4 前馈+反馈控制器的控制效果
4 仿真验证
为充分验证前馈+反馈控制策略的效果,文中通过仿真获取液压辅助驱动系统中变量泵排量、马达转矩及整车牵引力等参数的变化情况,并分析液压辅助驱动系统对提高重型车辆动力性的贡献.
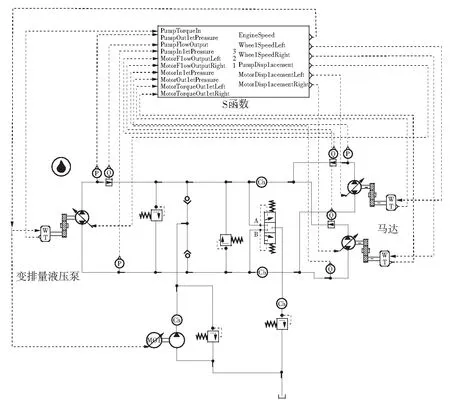
图5 AMESim 模型
4.1仿真参数
文中基于某重型车辆进行研究,该重型车辆的主要参数如下:整车质量为5.5×104kg,轴距为3 825 mm,发动机最大功率为275 kW@1 900 r/min,发动机最大转矩为1 806 Nm@1 400 r/min,泵最大排量为75 mm3/r,泵额定转速为3 900 r/min,泵最大转矩为1 190 Nm,泵额定压力为420 MPa,马达最大排量为1 248 mm3/r,马达额定转速为59 r/min,马达最大转矩为6 kNm,马达额定压力为420 MPa.
在Matlab/Simulink仿真软件平台上建立控制算法和整车模型,基于AMESim搭建液压驱动系统仿真模型,如图5和图6所示,两者之间通过S函数实现数据交换.这里假设路面附着系数为0.4,车辆从静止开始加速起步,变速器保持在1挡.
4.2仿真结果
对基于前馈+PI反馈控制器的控制系统进行仿真,泵排量控制信号波形如图7所示,可以看出,在车辆起步加速时排量会有较小的超调量,随后快速稳定在0.3附近.
为适应前轮负载需求,马达输出转矩会相应变化,如图8所示,在开始的2 s内,车辆从静止状态启动需要很大的起动转矩,车辆起动后,所需要的转矩迅速下降.
从以上仿真结果可看出,加入前馈+反馈控制策略后,能实现对泵排量的快速、精确的控制.维持路面附着系数不变,开启液压辅助驱动系统后车辆
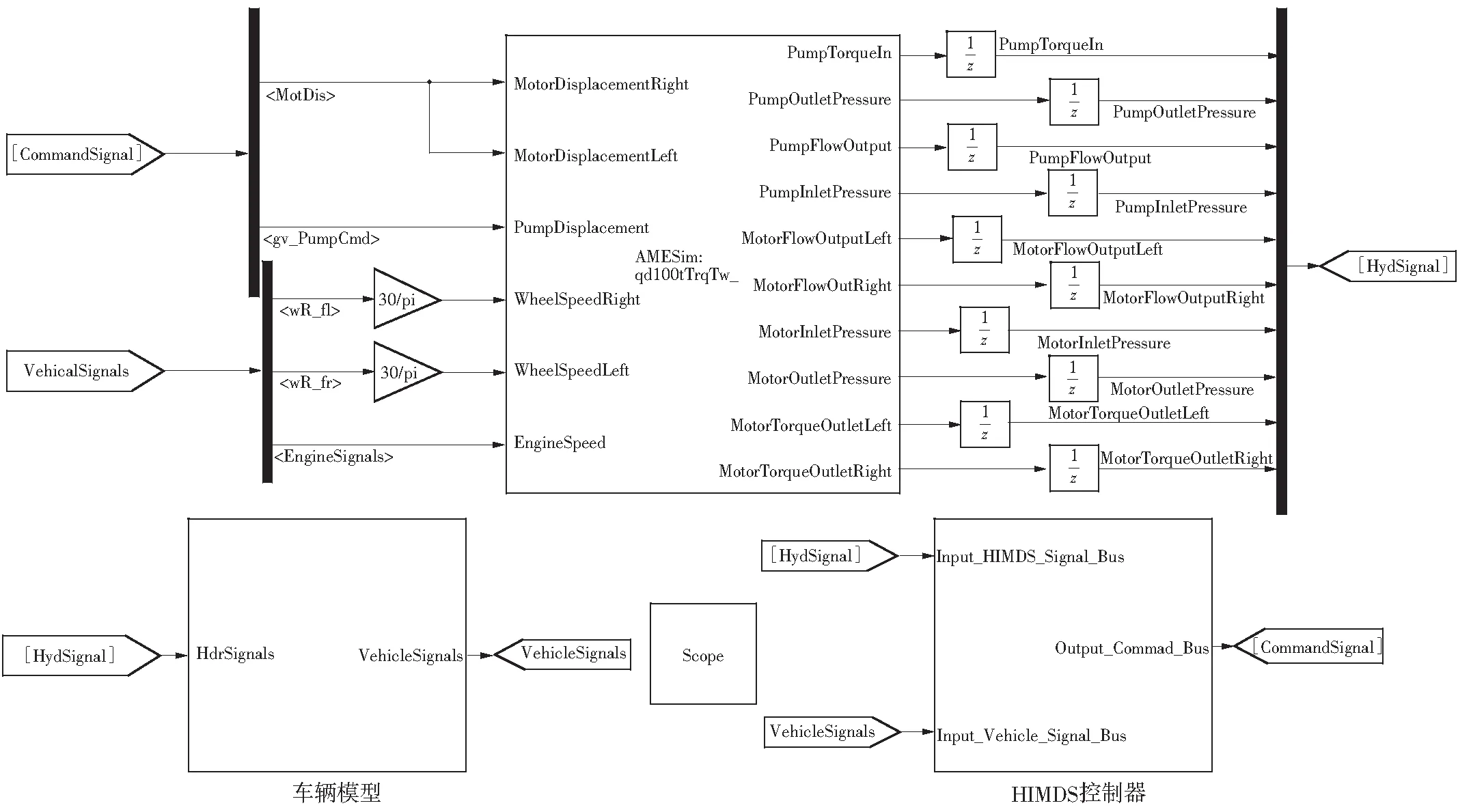
图6 Simulink 模型
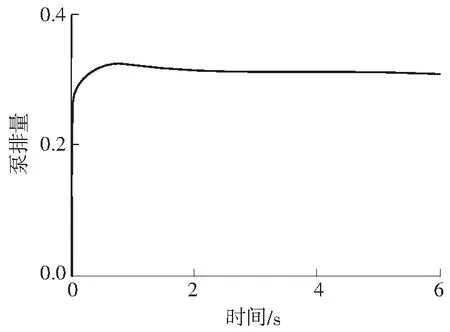
图7 泵排量信号波形
总牵引力有明显的增加,如图9所示.
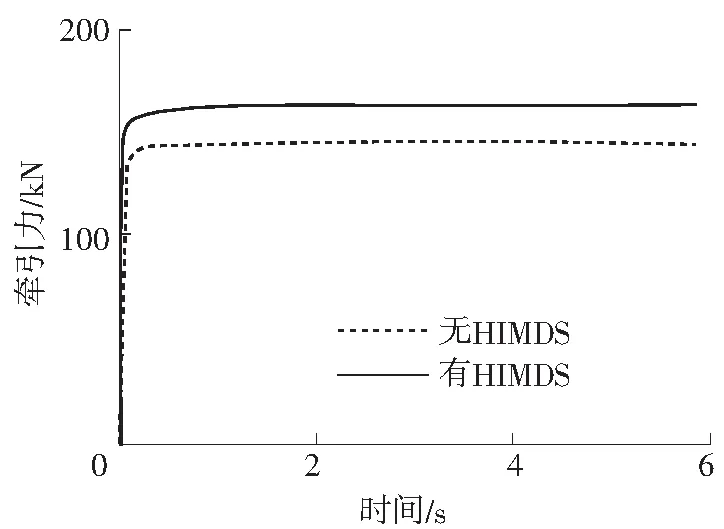
图9 车辆牵引力曲线
车辆的最大爬坡度和牵引力随着路面附着系数变化的仿真结果如图10所示.使用液压辅助驱动系统后,车辆的最大爬坡度和牵引力随着路面附着系数μ的增加而增加,其提高幅度随路面附着系数的增加而降低.
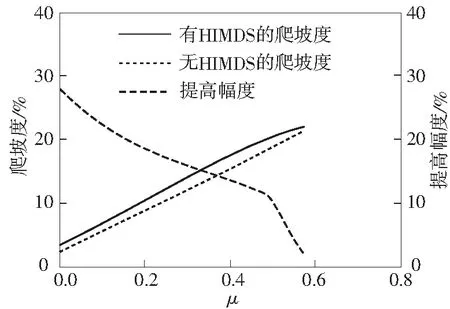
(a)最大爬坡度
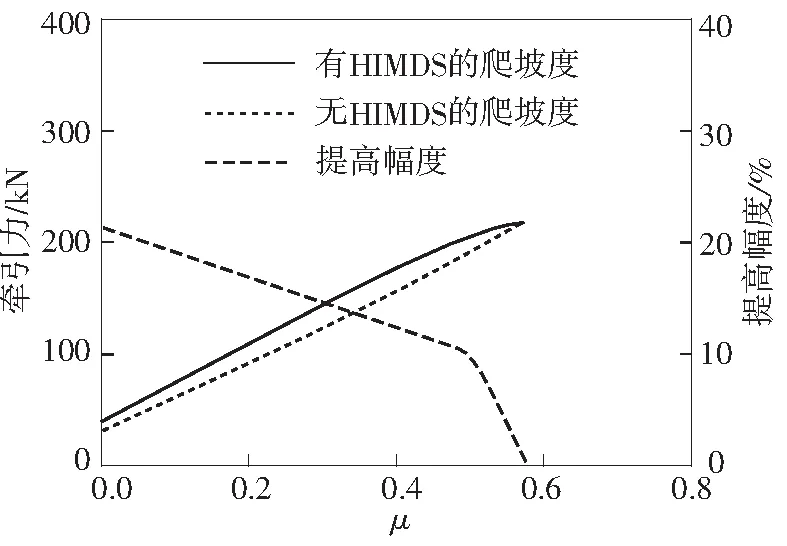
(b)最大牵引力
Fig.10Comparison of maximum grade ability and maximum traction
5 实车测试
基于某技术成熟的传统重型商用车,文中开发如图11所示的液压辅助驱动样车,然后通过实车测试验证前馈+反馈复合控制策略的有效性,并利用实验数据对标模型的可信性.
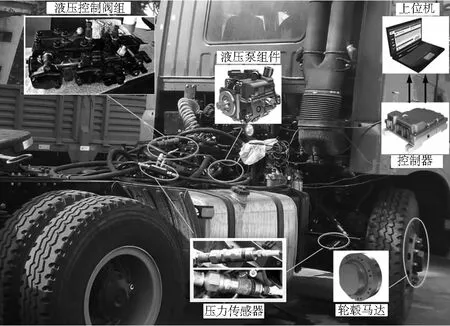
图11 液压辅助驱动车辆
(a)高压油路

(b)低压油路
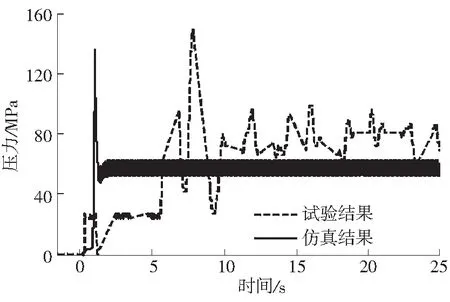
Fig.12Comparison of pressures for low-and high-pressure pipelines between experimental results and simulation results
液压辅助驱动系统高压、低压油路压力的实验结果与仿真结果对比如图12所示.由图可知,当系统切换至辅助驱动模式时,系统高压油路压力会出现短时的尖峰,随后快速平稳,仿真模型能够准确地反映实际现象.仿真结果与系统试验数据较为吻合.
6 结论
文中通过添加一套液压辅助驱动系统,将传统后驱车辆改装成全驱动力系统,可明显提高整车的牵引力和爬坡能力,从而满足重型车辆的动力性要求.
为提高车辆牵引效率,文中基于装配有液压辅助驱动系统的重型车辆,设计了前馈+反馈复合控制策略.Matlab/Simulink和AMESim的联合仿真表明,系统在复合控制器作用下,前轮转速能够快速跟随后轮转速,整个系统的控制效果良好,使整车的牵引效率得到优化.实车测试结果表明,该复合控制策略可保证液压辅助驱动系统提供平稳的驱动力.实验结果与仿真结果的对比分析表明了仿真结果的准确性.
[1]BODINA.Developmentofatrackedvehicletostudytheinfluenceofvehicleparametersontractiveperformanceinsoftterrain[J].JournalofTerramechanics,1999,36(3):167-181.
[2]周兵,徐蒙,范璐.低附着路面电动助力转向控制策略 [J].湖南大学学报(自然科学版),2015,42(2):29-34.
ZHOUBing,XUMeng,FANLu.Controlstrategyforelectricpowersteeringonlowfrictioncoefficientroads[J].JournalofHunanUniversity(NaturalSciences),2015,42(2):29-34.
[3]胡文奇,赵炬.四轮驱动车辆使用特点分析 [J].农业机械,2000,33(9):76-77.
HUWen-qi,ZHAOJü.Characteristicsanalysisoffour-wheel-drivevehicle[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2000,33(9):76-77.
[4]张仲良,钱正纵,陈杰.城市客车并联液压混合动力系统参数匹配 [J].中国公路学报,2013,26(3):176-182.
ZHANGZhong-liang,QIANZheng-zong,CHENJie.Parametermatchingofparallelhybridhydraulicsystemforurbanbus[J].ChinaJournalofHighwayandTransport,2013,26(3):176-182.
[5]罗念宁,赵立军,姜继海,等.一种混联式液压混合动力系统及控制策略 [J].华南理工大学学报(自然科学版),2014,42(9):134-139.
LUONian-ning,ZHAOLi-jun,JIANGJi-hai,etal.Aseries-parallelhydraulichybridsystemanditscontrolstrategy[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2014,42(9):134-139.
[6]MOLLAS,SILLJ,AYALEWB.Hydrostaticwheeldrivesforvehiclestabilitycontrol[J].SAEInternationalJournalofPassengerCars-MechanicalSystems,2010,3(1):187-198.
[7]SUNHui,JIANGJi-hai,WANGXin.Torquecontrolstra-tegyforaparallelhydraulichybridvehicle[J].JournalofTerramechanics,2009,46(6):259-265.
[8]赵金祥.液压节能汽车制动能量回收及动态调节控制策略的研究 [D].长春:吉林大学,2009.
[9]SCHWABDelmarG,GRAHAMDennisP.Hydrostaticauxiliarywheelmotorassistdrivesystemforvehicles:US3780820 [P].1973-12-25.
[10]PFUNDSTEINDonaldK.Supplementaryhydrostaticdriveelectroniccontrol:4l86816 [P].1980-02-05.
[11]TOSHIYUKIHasegnwa,NORIHIROIshii,KOJIIwaki,etal.Four-wheeldrivevehcile:US2005/0230171A1 [P].2005-10-20.
[12]WUD,BURTONR,SCHOENAUG,etal.Analysisofapressure-compensatedflowcontrolvalve[J].JournalofDynamicSystems,Measurement,andControl,2007,129(2):203-211.
[13]贺辉,宋大凤,杨南南,等.轮毂马达液驱系统控制与仿真 [J].吉林大学学报(工学版),2012,42(1):27-31.
HEHui,SONGDa-feng,YANGNan-nan,etal.Controlandsimulationofhydraulicin-wheelmotorpropulsionsystem[J].JournalofJilinUniversity(EngineeringandTechnologyEdition),2012,42(1):27-31.
[14]黄祖永.地面车辆理论 [M].北京:机械工业出版社,1985.
[15]GAOBZ,CHENH,HUYF,etal.Nonlinearfeedforward-feedbackcontrolofclutch-to-clutchshifttechnique[J].VehicleSystemDynamics,2011,49:1895-1911.
[16]ALMAM,LANDAUID,MARTINEZJJ,etal.Hybridadaptivefeedforward-feedbackcompensationalgorithmsforactivevibrationcontrolsystems[C]∥Proceedingsofthe50thIEEEConferenceonDecisionandControlandEuropeanControlConference.Orlando:IEEE,2011:6771-6776.Feedforward+Feedback Control for Hydraulic Assistance Drive System of Heavy Truck
s:SupportedbytheNationalNaturalScienceFoundationofChinaforYoungScholars(51305155)andtheNationalNaturalScienceFoundationofChina(51575221,51675214)
ZENGXiao-hua1JIANGYuan-de1LIGao-zhi1SONGDa-feng1HEHui2
(1. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130025, Jilin, China;2. GAC Automotive Engineering Institute, Guangzhou 510640, Guangdong, China)
1000-565X(2016)09-0116-007
2015-10-19
国家自然科学基金青年科学基金资助项目(51305155);国家自然科学基金资助项目(51575221,51675214)
曾小华(1977-),男,博士,教授,主要从事混合动力系统研究.E-mail:zeng.xiaohua@126.com
宋大凤(1977-),女,博士,副教授,主要从事车辆地面力学与底盘电子集成控制研究.E-mail:songdf@126.com
U469.7
10.3969/j.issn.1000-565X.2016.09.017
