步进电机在短波发射机的应用与问题解析
2016-10-29张志红
张志红
(国家新闻出版广电总局731台,福建 龙岩 364000)
工程技术
步进电机在短波发射机的应用与问题解析
张志红
(国家新闻出版广电总局731台,福建龙岩364000)
针对步进电机运行特点,提出一种采用FPGA对步进电机速度与位置控制的方法,建立一种步进电机驱动控制系统。该系统采用脉冲频率实现步进电机速度控制,可防止失步和过冲,提高工作效率,并结合实际工作控制,对平时出现的故障进行汇总,为今后维护打下基础。
短波发射机;FPGA;步进电机;步进驱动器;光电码盘
引言
步进电机是将电能转换为机械位移的一种机械驱动装置,在短波发射机的机械传动中取代了直流电机的地位,具有工作稳定、运行精确等特点。在设计控制系统时,需要多路通信能力和快速的运算能力和抗干扰能力,结合工业控制机,加上FPGA的功能,当每个运行的电机进行精确地控制时,发射机工作状态更佳,符合现行的短波发射机的控制设计。
1 步进电机在发射机中的运行原理
1.1系统概述
发射机的运行过程以FPGA为控制核心,由控制单元、保护单元和调谐单元构成,在发射机的运行过程,通过对FPGA逻辑外部信号的综合分析:一个脉冲信号,步进电机驱动传动,通过调整单元调整到位置驱动,由光电码盘实时检测,保证了调谐装置的旋转位置的准确性,具有良好的驱动能力和抗干扰能力,并赋予了快速的判断能力[1]。
1.2系统结构
步进电机控制系统结构(如图1所示),包括以下部分:
1)FPGA控制核心,以FPGA为整体信号处理板,接收短波发射机各个采集点所得的信息后,再对外输出相应的控制信号。在硬件上为短波发射机的开、关机、倒频,各路调谐元件的位置驱动,各个调谐点的精确细调,各种过荷保护;在软件上用户可以随时地对数据库数据进行查询、更改、删除等操作,检查各项存储数据指标。
2)步进驱动器:驱动接收来自FPGA输出的脉冲信号驱动步进电机,比如设定的方向、角位移和旋转一个固定点,均由输入控制脉冲的数目决定;脉冲频率则是决定了电机转速和加速度,通过改变脉冲频率达到调速控制的目的。
3)光电码盘:光电编码器通过齿轮电机采集光电信号,光电采样相对原机械采样更准确,FPGA发送的数字信号,即实际位置和设定电机的位置进行比较,如果设定的位置,原套数字值大于数字实时采样值的光电编码器实际位置,发出一个正信号,否则发出负信号,抗干扰强带光耦隔离,以避免误操作。
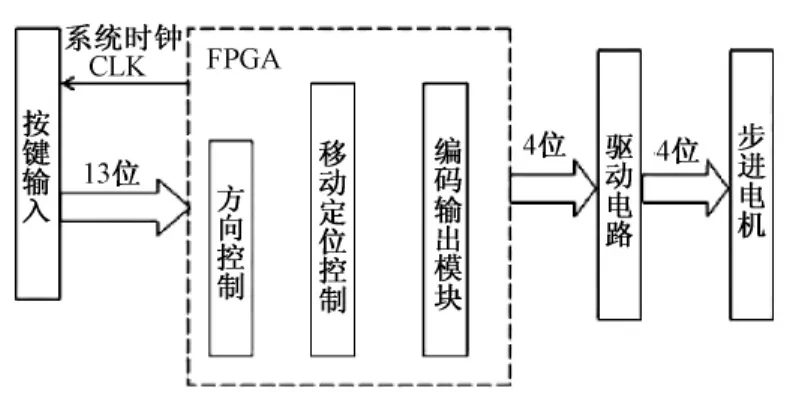
图1 步进电机FPGA控制系统框图
2 发射机工作控制原理
短波发射机的工作过程为粗调控制、细调控制、自动|手动控制,具体包括:
1)粗调控制:发射机与8驱动元件连接,工作时调整到预先设定的位置,其中所需的调谐电容、谐振电感和谐振腔的短连接板。
2)细调控制:发射机加电后,发射机要达到满功率,每一个调谐元件的电感需调整已到位,共振后才是最合理的状态,发送信号根据电容的微调,细分值取决于不同的驱动程序设置。
3)自动|手动控制:自动微调由检测信号反馈,人工手动操作则根据电压和电流状态,驱动步进电机正反转[2]。
2.1粗调
在FPGA内部ROM的不同工作频率的多调整对应的最优位置信息元素存储在发射机,需要调整到相应的调谐元件的频率调制的位置信息给FPGA主要的芯片spt-200,由主芯片将激励调整到相应的频率值和水平,各种电机预设位置数据信号。数字脉冲信号的预定位置信息转换传输到8个步进电机,也从A/D转换器读出调谐元件的当前位置信息,在内部FPGA将预设的位置和实际位置信息进行比较,通过逻辑判断,根据大小和极性的差异来控制步进电机的速度和方向,直到误差信号为零,调整到位,然后没有高频率输出的机器,命令输入开关,连接高频,准备微调。
2.2细调
前级调谐:各电机到位后解除封锁,开始微调前级电容器,根据相位电压的采集,正和负对比,反转电机,当错误时,顺时针旋转的电机,直至等级鉴相电压输出。
末级细调:前级细调结束后,启动末级3路调谐电容和5路调载电容,暂时封锁1路电机,高频供电电压和高频激励设定在较低的运行状态,通过相位器件,正和负方向调整,当调整和负载到位后,此时,发射机已准确地调谐在谐振点,下一步可以用全电压加音频。
2.3调谐中的电机控制
调谐中步进电机控制关键在于两点:一是速度的控制,调谐是有时间限定的,需要步进电机加减速的控制;二是精确度的控制,由光电码盘随动取样反馈,决定电机的精确度。
加减速的控制:减速加速是步进电机的运行速度、跳跃频率和加速度曲线加速,但不同的负载跳变频率是不同的,一般的跳跃频率不宜过大,以存储在ROM中的计数频率之前,FPGA直接选择,这个时间短;放缓,通过控制脉冲频率,电机能平稳减速和停止时注意刹车,不能太生硬,防止元件损坏,这样的特性很好地保护了连接装置的销钉。在三阶段,如果设计不合适,会导致步进电机失速。
3 实际问题与解决
1)问题1:电机正向转动和反向转动,和控制的方向相反。
处理:步进电机的驱动方向是由FPGA控制步进驱动器而来,脉冲信号出现错误,应是步进驱动器的内部出现问题,更换步进驱动器后,电机方向恢复正常。
2)问题2:电机转动中进行卡齿轮,步进电机无法正常转动。
处理:单独拆卸步进电机不带任何负载,接上电源进行驱动,仍会卡齿,对步进电机内部进行检查,发现是限位转轴由于长时间的运转,出现转轴平面削损,更换此机械装置后恢复正常。
3)问题3:发射机工作中忽然掉电,导致整体工作单元失去数据,恢复电源后,发现各路电机均无法驱动。
处理:发射机的FPGA控制系统没有UPS电源保护,断电后,对FPGA内部数据造成严重的冲击,对外输出无法正常运行,脉冲序列出现问题这样无法控制步进驱动器,对FPGA控制系统进行重启,如果重启无效的话,只能更换FPGA控制系统备件。
4)问题4:一路电机转动中,显示在液晶屏的,电机数值却无任何反应,仍停留在原值,其他各路电机数值正常。
处理:对数字显示的实际位置,由步进电机光电编码器反馈,物理采样电机光电编码器改变,信号转化成数字信号发送给FPGA,数值无法变化,估计是光电码盘问题或接线断开,先检查码盘的接线,无误后再更换光电码盘。
5)问题5:正常步进电机检修中,发现电机的外部有明显机油流溢的痕迹,表面温度比其他电机高。
处理:电机温度不对,说明内部的散热或是机油润滑是有问题的,外表观察发现该步进电机的装机方向和其他电机不同,机油进口是向下,由于重力原因,导致长期的机油溢出,机油的减少导致摩擦的增加,温度自然就升高。处理中,对机油进口进行了改良,增加了防溢接头,另外,将电机的位置重新安装[3]。
4 结语
在短波发射机中运用步进电机传动,优点突出,实际效果明显,有效提高了发射机的性能,与原来的直流伺服电机控制系统相比,具有很高的实用价值,且累计了多年故障处理的经验,有较强的自身步进电机的维护能力。
[1]黄晓兵.THB-522型150KW短波发射机维护手册[M].北京:中国书籍出版社,2011:148-152.
[2]TBH-522型短波发射机自动控制技术说明书[Z].北京:福昊达科技开发有限公司,2006:57-62.
[3]杨菁.基于FPGA的步进电机发射机控制系统设计[J].数字技术与应用,2014(6):7-8.
(编辑:王红霖)
Application and Problem Analysis of Stepping Motor in ShortWave Transm itter
Zhang Zhihong
(Publication,Radio,Film and Television of China 731 Station,Longyan Fujian 364000)
The steppermotor operation characteristic,put forward amethod of using FPGA to step into themotor speed and position control,establish a kind of step motor drive control system,the system uses pulse frequency achieve the steppermotor speed control,can prevent the loss of step and overshoot,improve work efficiency,combined with the actualwork control,fault of usual the summary,for futuremaintenance and lay the foundation.
shortwave transmitter;FPGA;steppermotor;step driver;photoelectricencoder
TM383.6
A
2095-0748(2016)11-0022-03
10.16525/j.cnki.14-1362/n.2016.11.09
2016-04-18
张志红(1964—),女,福建龙岩人,大专,电气工程师,研究方向:短波发射技术。
