四旋翼无人飞行器实验平台设计及姿态控制研究
2016-10-28范云生曹亚博赵永生王国峰
范云生,曹亚博,赵永生,王国峰
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
四旋翼无人飞行器实验平台设计及姿态控制研究
范云生,曹亚博,赵永生,王国峰
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
为了实现四旋翼无人飞行器姿态的稳定控制并验证控制算法的性能,设计了一种可用于四旋翼无人飞行器姿态控制算法研究及控制性能测试的物理实验平台;首先,利用牛顿-欧拉法建立了四旋翼无人飞行器的六自由度动力学模型;其次,对姿态传感器数据进行融合,利用互补滤波算法实现对四旋翼飞行器姿态进行快速准确解算;然后,在MATLAB环境下搭建了四旋翼飞行器仿真模型,并设计改进的PID控制器对飞行姿态进行了仿真;最后,搭建了一个四旋翼无人飞行器姿态控制的物理实验平台,进行了飞行器姿态控制算法的性能测试;实验结果表明了四旋翼无人飞行器实验平台设计的合理性和正确性,是一种快速有效的飞行器姿态控制算法性能测试实验平台。
四旋翼飞行器;姿态解算;改进PID控制;姿态控制
0 引言
四旋翼无人飞行器是一种可通过调整四个旋翼的转速对飞行姿态和位置进行控制的、具有能够垂直起降和自由悬停等特点的小型无人机[1-2]。由于其飞行性能好、灵活性大、成本低等诸多优点,在军用和民用领域具有广泛的应用前景,已成为目前无人机领域的研究热点之一[3-4]。其中高性能的飞行姿态控制是研究多旋翼无人飞行器飞行控制系统的关键技术之一[5],也是开展四旋翼飞行器其它方面研究的基础和前提。国内外学者也将诸多的控制算法应用到了四旋翼无人飞行器的姿态控制研究中,设计了如非线性PID控制[6]、自抗扰控制[7]、滑模控制[8]、自适应控制[9]、自适应鲁棒滑模控制[10]、神经网络控制[11]、模糊控制[12]等控制算法,也建立了控制系统的仿真实验平台[13],对飞行控制性能进行了仿真验证[14]。为了保证实际飞行的安全,降低开发成本,高效的开发飞行控制系统,对飞行器进行系留实验是四旋翼无人机试飞之前的一个重要环节。因此,在飞行器姿态控制仿真的基础上,建立一种飞行器姿态控制算法性能测试的物理实验平台便显得尤为重要。
本文针对四旋翼无人飞行器的姿态控制,首先根据牛顿-欧拉法建立了四旋翼无人飞行器的六自由度动力学模型,在MATLAB环境下搭建了飞行器的仿真模型,设计了改进型的PID控制器对其姿态控制进行仿真;然后,将传感器的陀螺仪、加速度传感器和电子罗盘的数据信息进行融合,利用互补滤波算法进行飞行姿态的解算,实现了四旋翼飞行器姿态的快速准确获取;最后,以微处理器STM32为核心控制器,采用改进型的PID姿态控制算法,设计了一种针对四旋翼无人飞行器姿态稳定控制器及其控制性能测试的物理实验平台。
1 飞行器姿态控制建模与仿真
1.1 四旋翼飞行器结构原理
四旋翼无人飞行器采用十字交叉水平分布四个旋翼的结构,它通过改变四个旋翼的各自的升力调整飞行器的姿态和位置,其坐标系如图1所示。

图1 坐标系的建立
图1中飞行器的2号和4号旋翼顺时针旋转,1号和3号旋翼逆时针旋转,用以平衡旋翼对机身的反扭矩和实现偏航。当1号旋翼降低转速且3号旋翼同时提升转速时,飞行器则完成俯冲动作,反之完成上仰动作。当2号旋翼降低转速且4号旋翼同时提升转速时,飞行器向左横滚,反之向右横滚。同时提升或降低各个旋翼的转速,则四旋翼飞行器上升或者下降。
1.2 四旋翼飞行器建模及仿真
四旋翼飞行器是一个典型的四输入六输出的欠驱动系统[15-16],选取机体坐标系统和地面坐标系如图1,通过对四旋翼的建模、无刷电机的建模和建立机体的简化转动模型,对机体进行受力分析,由Newton-Euler法得四旋翼无人飞行器的转动模型并简化如下:
(1)
(2)
其中:φ、θ、ψ分别为横滚角、俯仰角和偏航角,Ti(i=1,2,3,4) 为四个螺旋桨产生的升力,Qi(i=1,2,3,4)为四个螺旋桨产生的反扭矩, l为飞行器机体臂的长度,Jx、Jy、Jz为机体绕机体相应坐标轴旋转的转动惯量,在MATLAB中搭建Simulink仿真框图如图2所示,依据所建模型进行仿真得到姿态角的仿真结果如图3。
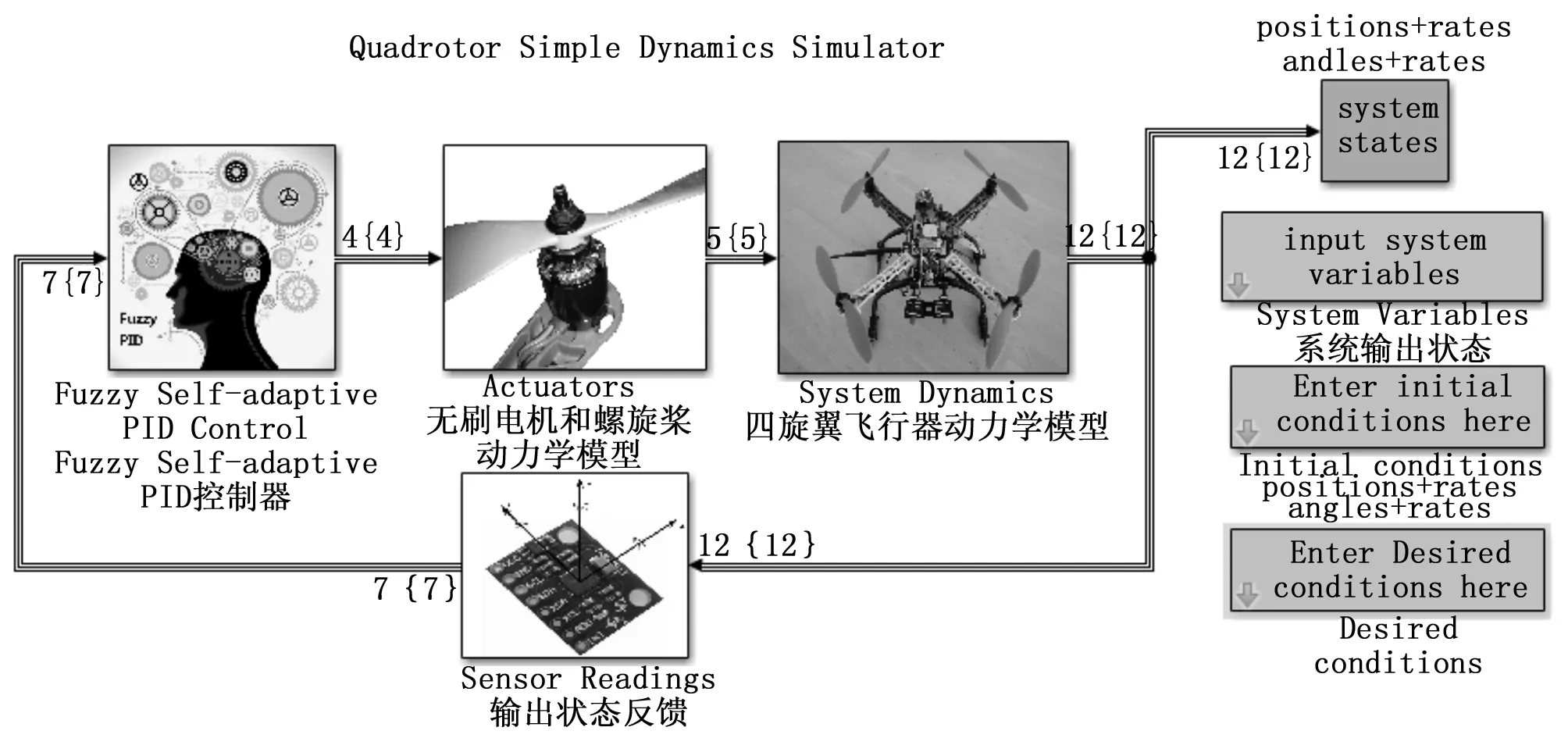
图2 Simulink仿真框图
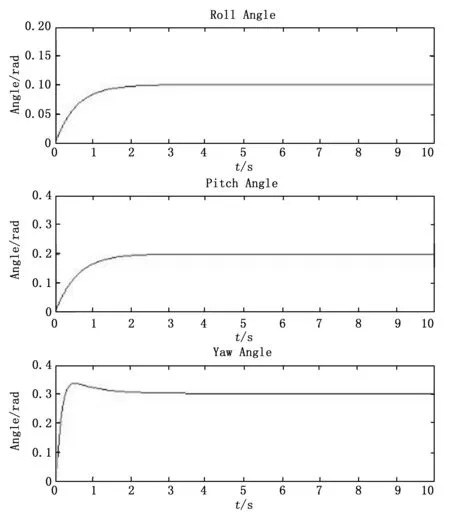
图3 横滚角、俯仰角和偏航角响应曲线
2 飞行姿态解算与控制器设计
2.1 姿态信息融合与解算
将三轴加速度计、三轴陀螺仪、三轴磁力计的数据进行融合分析,利用互补滤波算法进行飞行姿态解算,实现了四旋翼飞行器姿态的快速准确解算,姿态滤波和解算的过程如图4所示。

图4 姿态滤波和解算过程
设重力加速度在机体坐标系下的3个坐标轴上的分量为gn(n=x,y,z),则横滚角φ和俯仰角θ可通过式(3)和式(4)得出。
(3)
(4)
由于三轴加速度计测得的三轴重力加速度分量值受机体震动影响大导致噪声多,因而不能直接使用,需要进行滤波并借助三轴陀螺仪估计出机体在3个轴向上的重力加速度分量。
其中:gn(n=x,y,z)由以下步骤得出:

(5)
(6)
滤波前后所得到的三轴重力加速度值对比如图5所示。
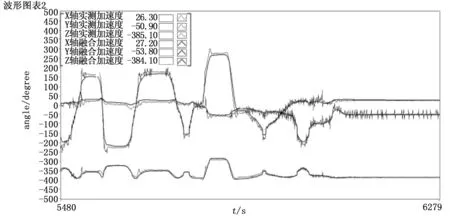
图5 三轴重力加速度值
由图5可看出滤波后得到的三轴重力加速度值滤掉了因震动而产生的噪声并克服了陀螺仪的漂移。通过该滤波得到的三轴重力加速度值按式(3)和式(4)计算得到的姿态角能够真实反映飞行器的姿态信息。
2.2 姿态控制器设计
常规PID姿态控制器是利用的是期望姿态与当前姿态的偏差,通过控制作用输出四路不同的PWM驱动电机产生升力,使得飞行器调整自己的姿态,满足当前姿态与期望姿态的误差为0的目标。为了快速抑制外部扰动和提高系统的动态响应性能,本文采用改进式PID控制算法如图6所示。
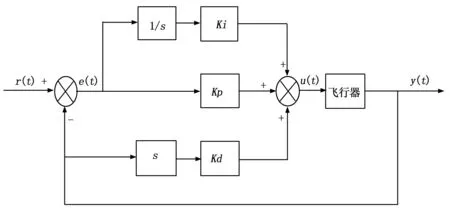
图6 改进型PID控制器
图6中,将姿态传感器测得的角速度值作为微分项,替代传统PID控制器中相邻两次偏差之差的导数,利用姿态传感器的硬件性能,提高控制器的响应速度,从而提高系统的整体响应性能。
3 实验平台设计及实验结果分析
3.1 飞行器姿态控制实验平台的设计
为了测试飞行器姿态控制算法的实际控制效果,搭建了一个四旋翼无人飞行器姿态控制性能测试的物理实验平台,通过该平台可针对飞行姿态控制进行研究,并且在实验室环境中对飞行控制系统进行验证和参数整定,同时对姿态控制算法性能进行测试,可提高开发效率、减少开发成本,保证实际飞行试验的安全。
四旋翼无人飞行器姿态控制实验平台由三部分组成,一个是飞行器性能参数监控系统,一个是飞行器及其机载控制系统,一个是飞行器实验台架。其中,飞行器性能参数监控系统通过数传电台主要完成控制器参数的设定,姿态控制过程数据的记录及显示等功能;飞行器及其机载控制系统主要由STM32微控制器、三轴加速度计、三轴陀螺仪、三轴磁力计、无刷电调和电机、无线数传电台等部分组成,并完成对飞行姿态的实时控制,另外考虑到将来的拓展作用又增加了气压高度计、超声波测距模块和GPS模块;飞行器实验台架主要将四旋翼飞行器模型通过万向节连接到底座上。
3.2 实验结果与分析
通过飞行器性能参数监控系统设定姿态控制器的参数和期望的姿态角,并由无线数传电台发送到机载控制器中,实现姿态角的阶跃响应性能测试,其姿态角的阶跃响应曲线和误差曲线如图7和图8所示。
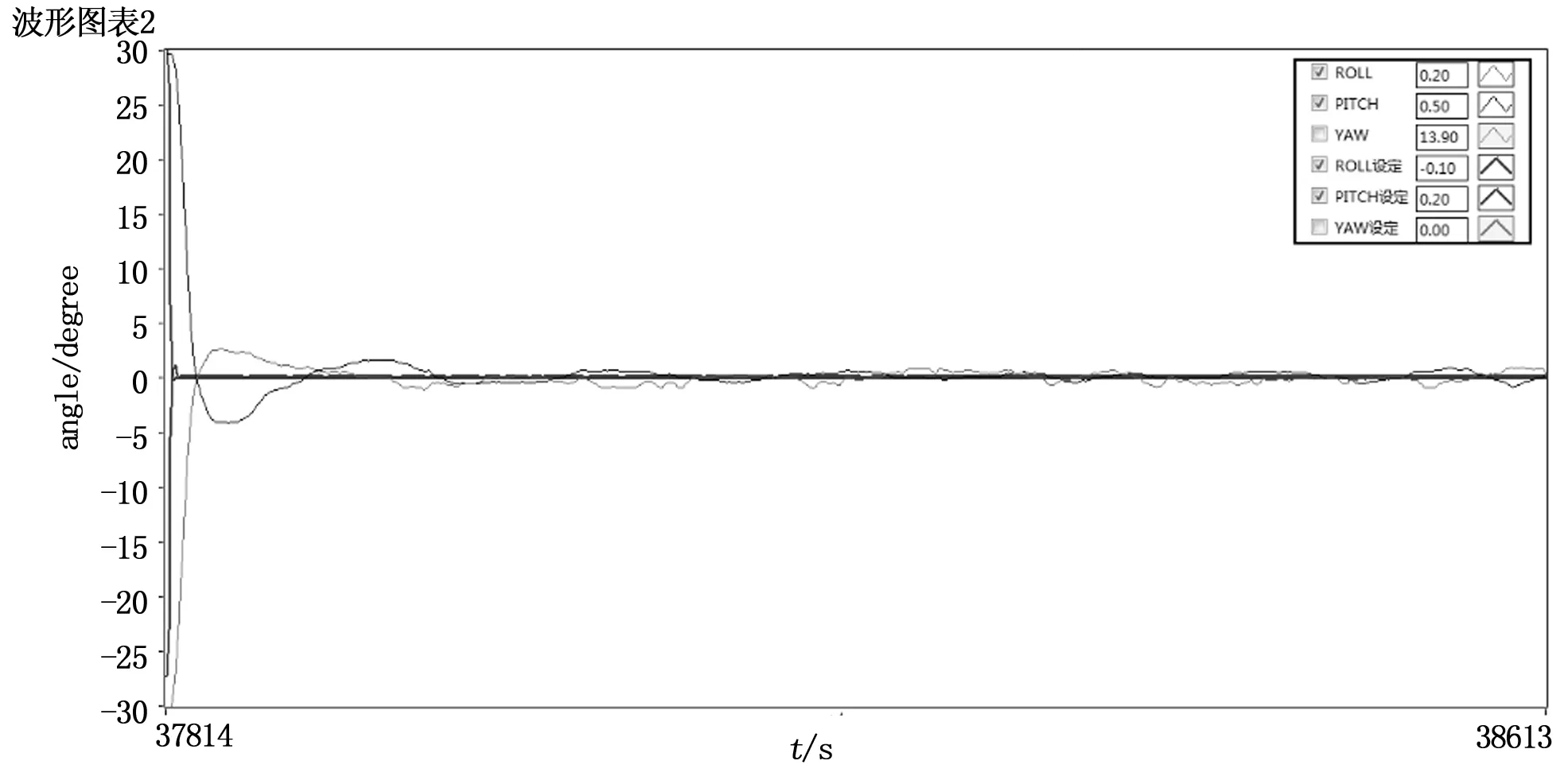
图7 横滚和俯仰角的阶跃响应
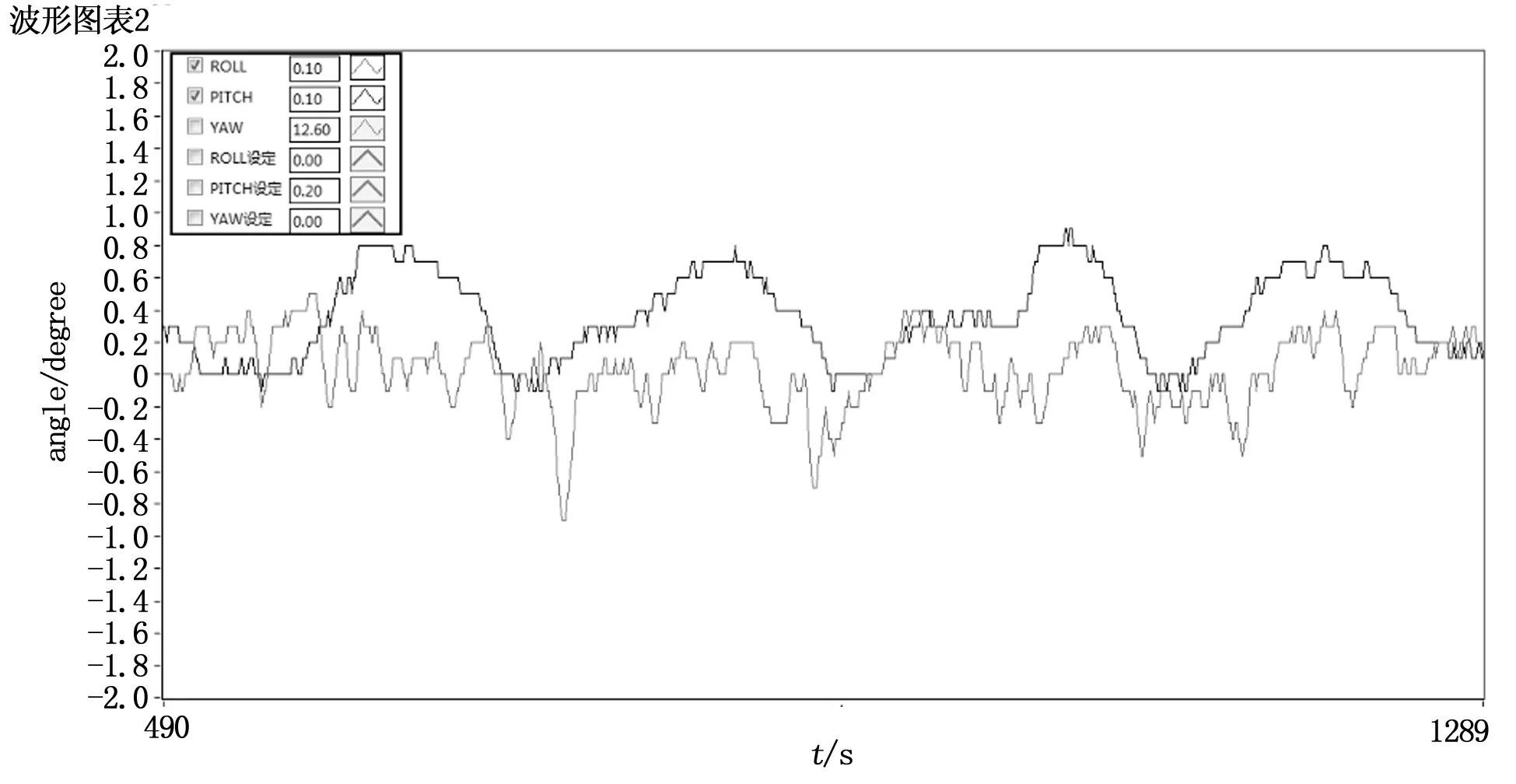
图8 横滚和俯仰角的角度控制精度
由图7可看出飞行器姿态控制响应较为迅速,同时由图8可看出姿态角的控制精度在±1°范围内。经过多次的实际飞行,飞行器可完成起飞、降落、横滚、俯仰和偏航控制,结果表明本设计的软硬件工作正常,能够满足对四旋翼飞行器姿态的控制需求。
4 结论
四旋翼无人飞行器的姿态稳定控制是其飞行控制系统的关键技术之一。本文针对四旋翼无人飞行器的姿态控制,在飞行器姿态控制仿真实验的基础上,设计了一种可用于四旋翼无人飞行器姿态控制算法研究及控制性能测试的物理实验平台。通过分析多旋翼飞行器的结构和飞行原理,对四旋翼飞行器进行建模和改进PID姿态控制的仿真;利用互补滤波算法进行飞行姿态信息数据的融合和解算,实现了四旋翼飞行器姿态的快速准确获取;最后,完成了姿态控制实验平台的软硬件设计,搭建了实际的飞行器性能测试平台,可实现了对飞行器姿态控制性能的测试。实验结果表明了四旋翼无人飞行器姿态控制算法性能测试实验平台设计达到了设计预期目标,是一种快速有效的飞行器姿态控制算法性能测试实验平台,可以提高飞行控制器的开发效率,减少开发成本,并保证实际飞行试验的安全。
[1] Bouabdallah S, Murrieri P, Siegwart R. Design and Control of an Indoor Micro Quadrotor[A]. Proceedings of the 2004 IEEE International Conference on Robotics & Automation[C]. New Orleans,LA, 2004.
[2] Tayebi A, McGilvray S. Attitude stabilization of a VTOL quadrotor aircraft[J]. IEEE Transactions on Control Systems Technology, 2006,14(3):562-571.
[3] Ilhan I, Karakose M. Type-2 Fuzzy Based Quadrotor Control Approach[M].2013.
[4] Bouabdallah S, Noth A, Siegwart R. PID vs LQ control techniques applied to an indoor micro quadrotor[M].2004:2451-2456.
[5] 梁延德, 程 敏, 何福本, 等. 基于互补滤波器的四旋翼飞行器姿态解算[J]. 传感器与微系统, 2011(11):56-58.
[6] 宿敬亚, 樊鹏辉, 蔡开元. 四旋翼飞行器的非线性PID姿态控制[J]. 北京航空航天大学学报, 2011(09): 1054-1058.
[7] 彭 艳, 刘 梅, 罗 均, 等. 无人旋翼机线性自抗扰航向控制[J]. 仪器仪表学报, 2013(8):1894-1900.
[8] Lénaïck B, Yuri B S, Brian L. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J]. Journal of the Franklin Institute, 2012,349(2):658-684.
[9] Palunko I, Fierro R. Adaptive control of a quadrotor with dynamic changes in the center of gravity[A]. Proceedings of the 18th IFAC World Congress[C]. 2011.
[10] Waslander S, Hoffmann G M, Jang J S. Multi-agent quadrotor testbed control design:integral sliding mode vs reinforcement learning[A]. 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems[C]. 2005[C].
[11] Mehmet Önder Efe, Senior M. Neural Network Assisted Computationally Simple PID Control of a Quadrotor UAV[J]. IEEE Transactions on Industrial Informatics, 2011,7(2):354-361.
[12] Mehranpour M R, Emamgholi O, Shahri A M, et al. A New Fuzzy Adaptive Control for a Quadrotor Flying Robot[A]. 13th Iranian Conference on Fuzzy Systems[C]. 2013.
[13] 周德新, 马腾达. 四旋翼无人机飞控系统仿真平台研究[J]. 计算机测量与控制, 2014(2):424-426.
[14] Salih A L, Moghavvemi M, Mohamed H A F, et al. Modelling and PID controller design for a quadrotor unmanned air vehicle[J]. 2010:5.
[15] Amir M Y, Abbass V. Modeling of quadrotor helicopter dynamics[M]//2008:100-105.
[16] Jongho S, Kim H J, Youdan K, et al. Autonomous Flight of the Rotorcraft-Based UAV Using RISE Feedback and NN Feedforward Terms[J]. Control Systems Technology, IEEE Transactions on, 2012,20(5).
Research on Design of Quadrotor Aircraft Experimental Platform and Attitude Control
Fan Yunsheng,Cao Yabo,Zhao Yongsheng,Wang Guofeng
(School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China)
For the attitude control and performance test of a quadrotor a kind of physical experiment platform is designed which can be used to study and test the attitude control algorithm of a quadrotor UAV. Firstly, six degree of freedom dynamics model of a quadrotor UAV is established by using the Newton-Euler method. Secondly, the attitude data measured by attitude sensors is analyzed using the complementary filter algorithm to obtain the accurate attitude of the quadrotor UAV fast. Thirdly, in the MATLAB environment, the simulation model of a quadrotor UAV is built, and an improved PID controller is applied to the vehicle’s simulation mode for attitude control. Finally, a physical experiment platform of the attitude control of the quadrotor UAV is built, and the performance test of the attitude control algorithm is carried out. The experimental results show that the design of the quadrotor UAV experimental platform is reasonable and correct, and it is a fast and effective platform for the performance testing of the quadrotor UAV attitude control algorithm.
quadrotor; attitude algorithm; improved PID control; attitude control
2016-01-26;
2016-03-07。
国家自然科学基金资助项目(61374114);辽宁省自然科学基金资助项目(2015020022);中央高校基本科研业务费资助项目(3132015039)。
范云生(1981-),男,工学博士,讲师,主要从事交通信息工程及控制,无人系统的智能控制方向的研究。
1671-4598(2016)07-0117-04
10.16526/j.cnki.11-4762/tp.2016.07.031
TP3 文献标识码:A
