齿轮齿条直线运动的线性测量与分析
2016-10-28乡碧云
乡碧云
(顺德职业技术学院,广东 顺德 528300)
齿轮齿条直线运动的线性测量与分析
乡碧云
(顺德职业技术学院,广东 顺德 528300)
在齿轮传动机构的直线运动研究中,为了测量直线误差,设计了齿轮齿条的测量平台;采用伺服电机直接驱动齿轮在齿条上运动,并以基于运动控制点位运动模式来实现测量间距和待机等控制要求;在齿轮齿条传动机构直线运动的过程中,用激光干涉仪对与齿轮同轴运动的工作台实际运动位置测量,获得测量数据;用最小二乘法求解线性矛盾方程的方法来构造拟合函数,并将其推广至任意次和任意多个变量的拟合函数,使用MATLAB编程求解,获得与设计数据曲线对应的实际数据曲线,得出齿轮齿条的线性定位精度和重复精度;这项技术可以推广到对大多数的直线运动机构来进行线性测量及数据分析;也能成为直线运动控制中线性参数自动补偿算法的依据。
线性测量;激光干涉仪;运动控制器;最小二乘法;拟合函数
0 引言
在工业领域中,齿轮齿条传动机构的应用范围很广。在一些需要重负荷、高精度、高刚性、高速度、长行程运动控制的机械设备中,常常采用齿轮齿条传动机构应用于快速、精确定位。齿轮齿条传动机构是工业应用的重要零部件之一。
当前,在大多数厂家特别小型加工厂,齿轮齿条生产后的产品测量工艺流程里,常见的测量方法是测量人员普测仪器进行打表读数,或者做些成型卡规量度。这样做法测量精度有限,采用这样的齿轮齿条的机器运动精度也难保证。为了改善对齿轮齿条的测量方法我们尝试创新一种齿轮齿条直线运动线性测量及数据分析形式。
1 设计测量及分析系统
测量系统设计由测量平台、运动控制系统[1]、激光干涉仪[2]测量系统组成,如图1所示。对齿轮齿条的数据分析方面,一方面采用Matlab及其仿真软件对齿轮齿条理想数据分析拟合[3],另一方面,采用激光干涉仪测量并分析实测结果,最后拟合理想与实测结果,提出对齿轮齿条运动参数补偿的调整方式。

图1 测量系统
1.1 测量平台的搭建
测量平台由齿轮齿条运动副以及控制齿轮齿条运动的机构组成,主要的机械结构[4]如图2所示。
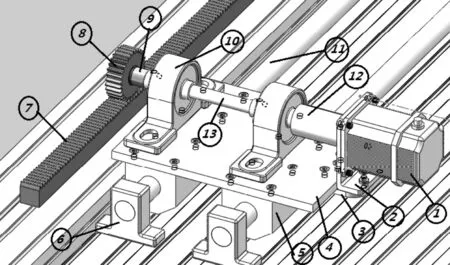
(1)伺服电机,(2)电机法兰,(3)连接角铁, (4) 滑块垫板,(5)滑块,(6) 运动机构(7)被测齿条,(8)被测齿轮,(9)轴套,(10)带座轴承,(11)直线导轨(12)联轴器,(13)齿轮轴图2 机械结构
1.2 齿轮齿条节点数据的采集
本次试验选取的是模数为1.5,齿数为30的标准的直齿圆柱齿轮,齿条的模数也为1.5。如图3所示为齿轮齿条的节点数据图,其中A、B、C、D点为齿轮与齿条啮合运动中的一些节点。
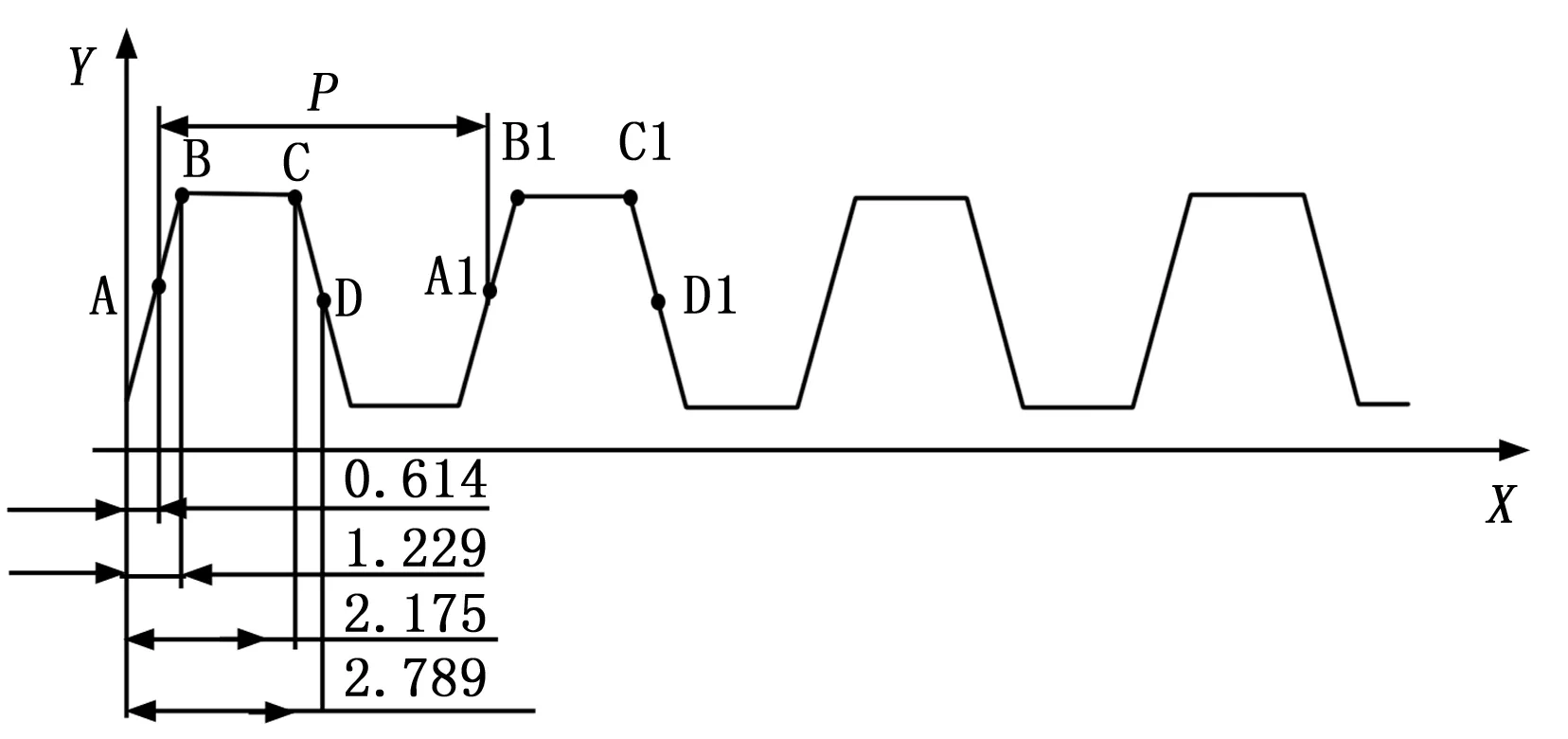
图3 齿轮齿条的节点数据图
齿轮齿条的设计数据:
齿距p=4.712 mm,(a为测量点间所取的间距)
(n=1,2,3...)(n<被测齿条的齿数/a)
An=A+n·(a·p);
Bn=B+n·(a·p);
Cn=C+n·(a·p);
Dn=D+n·(a·p);
以运动控制器控制伺服电机通过传动轴带动齿轮在齿条上运动,用激光干涉仪做线性测量,得到齿轮运动的实际数据。齿轮运动到A点,停顿,用激光干涉仪测量采集A数据;再控制齿轮运动到A1点,停顿,用激光干涉仪测量采集A1数据;再到A2点……依此类推,直到测完整条齿条。此为An组的数据。
以此方法测量Bn组,Cn组和Dn组的数据。选取4节点测量采集4组实测数据。
1.3 激光干涉仪测量软件数据采集与分析操作流程
被测齿轮齿条如图1安装在平台上,调整时尽可能将齿轮齿条啮合在理想的分度圆点上,然后架设激光干涉仪,选定几个齿之间的移动距离作为测量间距,对齿轮齿条的啮合精度进行线性测量,采集实测数据分析可对齿轮齿条进行更高的精度调试。测量流程图如图4所示。

图4 测量操作流程图
1.4 运动控制流程
在进行实验的数据测量中,我们需要通过运动控制器做到的控制要求是:通过伺服电机控制齿轮运动到第一个测量点,然后停下,3 s后;电机再启动,控制齿轮运动到第二个测量点,然后停下,3 s后……依次循环,直到完成对所有测量点测量。
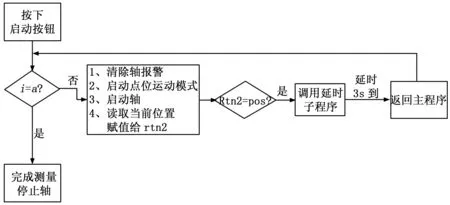
图5 运动控制流程图
2 数据分析模型的建立
2.1 解矛盾方程法拟合多变量函数
采集数据完成以后,根据数据拟合运动位置曲线,分析位置误差。我们通过求解均方误差极小意义下矛盾方程的解来获取拟合曲线。
由数学推导可以证明:方程组AT·AX=ATY的解就是矛盾方程组AX=Y在最小二乘法意义下的解。

(1)
如果拟合函数有n个自变量并进行一次拟合,则其拟合函数为:
通过m(m>>n)次试验,测量得到了m组(yi,x1i,x2i,...,xki,...,x(n-1)i,xni)的实验数据,则可得到上面n个自变量拟合函数的法方程:
(2)
只要对法方程稍加修改,就可以得到有n个自变量的任意次方的拟合函数的法方程,通过法方程的求解,就可以得到拟合函数中的各项系数。
(3)
2.2 模型的仿真验证
现利用解矛盾方程的方法,用一次函数拟合案例中齿轮齿条的理想坐标数据An=A+n·(a·p);且a取10,取7次数据采集(见图3)见表1,推荐一种拟合方法。

表1 数据采集范例
设拟合函数曲线为f(x)=a0+a1x形成法方程:
而

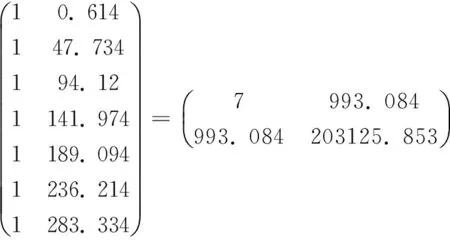
ATY==

得到
解得到:a0=1.875,a1=0
f(x)=1.875
2.3 Matlab仿真拟合
在Matlab中运行并绘图,得出运行结果与拟合曲线。
3 结束语
本设计系统对生产出来的直齿圆柱齿轮齿条啮合运动设计一个测量平台,用运动控制器控制伺服电机带动齿轮在齿条上运动,再用激光干涉仪在已选定的一系列节点处测量齿轮运动的线性度,得到数据后再进行数据处理,得出齿轮齿条的线性定位精度和重复性,进一步研究可以提出对齿轮齿条运动参数自动补偿的控制方法。
在这套设备上只要我们稍微修改一下测量平台上的夹具和装夹方式,就可以推广到对大多数的直线运动机构来进行线性测量及数据分析,有极大的应用及推广范围。
本系统使用了激光干涉仪测量技术,这种测量仪器属于贵重精密仪器,是普通的企业不一定能拥有测量技术,因此,还需要进一步的改进。在系统设计方案当中,我们铺设了一条技术暗线,运动路线放置了光栅尺。如果没有激光干涉仪,或者不需要测量精度非常高的情况下,就用控制器读取光栅尺的位置数据,取代激光干涉仪测量,这一部分相关技术,是项目实用性有待提高的一个方面。
[1] 固高科技.OtoStudio高级运动控制编程手册[Z],2010.
[2]RENISHAW. 激光干涉仪原理及应用概述[Z]. 2004.
[3] 百度文库.线性拟合方法[EB/OL].http://wenku.baidu.com/view/d31c8252b84ae45c3b358c4d.html.
[4] 中国机械工程学会,中国机械设计大典编委会.机械设计手册[M]. 北京:电子工业出版社,2007.
Linear Measurement and Analysis of Linear Movement of Gear Rack
Xiang Biyun
(Shunde Polytechnic, Shunde 528300,China)
In the research of the linear motion of the gear drive mechanism, the measuring platform of the gear rack is designed in order to measure the linear error. using servo motor directly drives the gears on the rack. and is based on the motion control PT point mode to realize the measurement of the Measuring distance and standby control requirements etc.In the process of the linear motion of the gear and rack drive mechanism, the measuring data is obtained by using the laser interferometer to measure the position of the actual movement of the gear axis. Using the least square method to solve the linear equations of contradiction, and to extend it to any number of times and arbitrary number of fitting functions, using MATLAB programming to obtain the actual data curve corresponds with design data curve,and the linear positioning accuracy and repeatability of gear and rack。This technology can be extended to linear measurement and data analysis of the majority of linear motion mechanism. It can also be used as the basis for the automatic compensation algorithm of linear motion control.
linear measurement; laser interferometer; motion controller;least square method; fitting function
2015-10-02;
2016-02-24。
顺德职业技术学院创新强校工程“自主创新能力提升”类项目(2015-KJZX051)。
乡碧云(1964-),女,广东四会人,高级工程师,主要从事机电控制系统及自动化技术应用、数控技术应用方向的研究。
1671-4598(2016)07-0028-03
10.16526/j.cnki.11-4762/tp.2016.07.008
TP273 文献标识码:A
