音码混合测距在深空探测中的应用研究
2016-10-28陶华堂
李 强, 陶华堂
(中国卫星海上测控部, 江苏 江阴 214400)
音码混合测距在深空探测中的应用研究
李 强, 陶华堂
(中国卫星海上测控部, 江苏 江阴 214400)
深空探测具有目标距离远、信号往返时延大和信号微弱等特点, 纯侧音测距和伪码测距无法满足深空测距的需求;提出了一种适用于深空探测的音码混合测距方法,详细分析了测距信号发送、接收时序,对由于超远距离、超大时延引起的测距信号返回时间预报偏差较大,采取有效的保护措施,减小测距信号返回时间预报偏差,避免距离匹配出错;阐述了距离捕获、解模糊和跟踪的过程,充分考虑了音码相位进周问题,提出了改进措施,提高了距离测量值的准确性;分析估算了测距精度和距离捕获时间,分析结果表明文章提出的音码混合测距方案具有较高的测距精度,较短的距离捕获时间;最后在由DSP和FPGA构建的全数字化控制平台上进行了实验研究,与纯侧音测距相比,音码混合测距精度更高,测距值更稳定。
音码测距;深空探测;距离捕获;距离跟踪
0 引言
为充分利用空间资源、探索宇宙的起源和演化,寻求社会的可持续发展,人类积极开展深空探测活动。国家将“探月工程”列为中长期科技发展重大专项,成功发射了“嫦娥号”系列探测卫星,进行月球探测活动,并将陆续展开其他行星的探测活动。目标器的跟踪、测量、遥测、遥控、通信主要由地面测控系统完成,而距离测量是实现目标器遥测遥控、通信的基础。目前用于深空测距的方法有脉冲雷达测距和统一载波测距。脉冲雷达由于峰值功率受限,作用距离受到限制,且测速精度不高,也不能同时传输其他数据,在深空探测时应用较少。统一载波测距是将一定形式的测距信号调制在连续载波上,比较接收测距信号与发射测距信号时延求得距离,其突出特点是存在相位模糊,所以距离解模糊是连续波测距的一个更为特殊的问题。目前统一载波测距主要有纯侧音测距、扩频伪码测距和音码混合测距。纯侧音测距和伪码测距各有优缺点,对于纯侧音测距,提高侧音频率可获得高精度的测距,且所占用的带宽窄,捕获快,但解相位模糊复杂;而伪码测距无模糊距离长,但要提高精度必须减小码元宽度,使得占用带宽增加,捕获更加复杂,占用时间长。
深空探测的突出特点是目标器距离远、信号往返传输时延大、信号微弱。单纯的侧音测距和伪码测距不能满足测控要求。本文提出一种音码混合测距方法,该方法对由于超远距离、超大时延引起的测距信号返回时间预报偏差较大,采取有效的保护措施,减小测距信号返回时间预报偏差,避免距离匹配出错。最后进行了实验研究,结果表明,音码混合测距精度更高。
1 深空探测特点分析
深空探测具有目标距离远、信号强度衰减大、信号传输时延大、信号频率变化范围小等特点。
1.1 超远距离
与常规近地飞行器相比,深空探测目标距离超远,例如探月的目标飞行器飞行距离约为3 540万km,导致信号在传输过程中衰减量较大,地面接收到的信号信噪比较低。假设近地飞行器距离为1 000 km,探月飞行器由于距离变远产生的路径损失大约为50 dB,因此地面设备必须具有对低信噪比信号捕获跟踪的功能。
1.2 信号往返时延大
2 音码混合测距方案
音码混合测距和纯侧音测距相比,有两个明显特点:一是音码测距只有一个侧音频率;二是解模糊序列码调制在侧音上,距捕过程中用来解距离模糊。音码测距分为距离捕获、解模糊、测量3个阶段,捕获阶段是完成单音的接收解调;解模糊阶段是按照一定发送间隔顺序发送解模糊码,一直发送到最高的解模糊码;测量阶段是一直发送最高的解模糊码。
2.1 测距模块组成
音码测距模块主要由音码发生器和音码测距处理单元等模块组成,如图1所示。音码发生器也称测距信号产生器,主要用于生成测距信号,即正弦侧音信号和序列码信号。音码测距处理单元通过控制测距信号产生器和测距信号同步器来实现音码测距功能,音码测距包括单音捕获、音码解模糊和测量三个阶段。测距处理单元在测量阶段采样测距信号产生器和测距信号同步器的码元个数差值和侧音相位差值,通过解模糊并扣除飞行器和地面设备零值后计算出测量站与飞行器之间的径向距离。

图1 音码测距模块的组成框图
2.2 信号形式
音码混合测距信号由高频侧音fr和及其分谐波得到的序列码rn(t),该序列码以调相(PM)的方式调制在侧音副载波上,得到的测距副载波信号为:
(1)
式中,fr为测距侧音信号(一般为正弦信号)的频率, Ktone为序列码调制度,序列码Cn(t)是由测距侧音的谐波产生,是双极性周期矩形函数,主要用来解距离模糊,其信号可表示为:
(2)
其中:Cn为第n个码,⊕代表异或,Qi为频率为fr/2n的方波。
码序列也可以用递推公式表示:
(3)
每个序列码与高频侧音信号同步,且传输的周期固定,以便接收机进行相关解调和相位对齐。测距信号通过调相体制调制在基带主载波上,其载波信号形式为:
(4)
2.3 距离捕获方案
基带中频接收单元锁定卫星发射的下行信号后,开始发射上行信号,待双捕完成后测距模块开始工作。音码混合测距采用侧音长发、序列码轮发的基本测距原理。测距信号发送和接收时序图如图2所示,首先发送单侧音,侧音发送的开始时刻记为ST0,发送保持时间为T1+Tp,然后发送解模糊序列码C1,发送保持时间从ST0+T1+Tp开始计时,保持发送T2+Tp时间后开始发送C2解模糊序列码,即ST0+T1+T2+2Tp时刻开始发送C2解模糊序列码,以此类推,发送到C20解模糊序列码。其中, ST0测距信号发送的起始时刻,T1为侧音信号发送保持时间,T2为码发送保持时间,Tp为信号保护间隔时间。
深空条件下,目标距离远,信号极其微弱,空间环境影响较大,可能存在侧音不能同步或者解模糊码相关异常的情况,这时地面站需要重新进行距捕。由于远距离而导致的信号往返传输大时延将严重降低距捕的效率,为了增加距捕一次性成功的概率,模糊码发送可以根据选择进行多次轮发,其发送时序同前面所述。
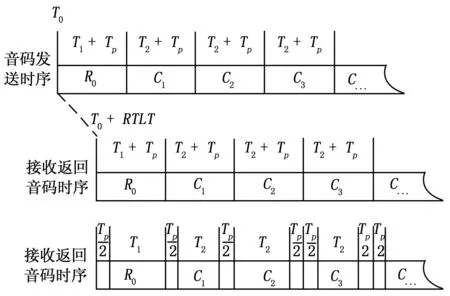
图2 音码测距信号发送和接收时序图

音码测距捕获处理流程图如图3所示。音码测距只有一个侧音频率,仅需进行一次侧音副载波捕获、跟踪,解模糊码与侧音相干不需要环路跟踪,音码测距能快速捕获低信噪比测距信号,T1时间长短主要与完成侧音副载波捕获跟踪时间有关;T2是解模糊码相关的时间,其大小与测距信号信噪比和预报精度等相关联;Tp为测距码之间的保护时间,大小与预报精度相关联。
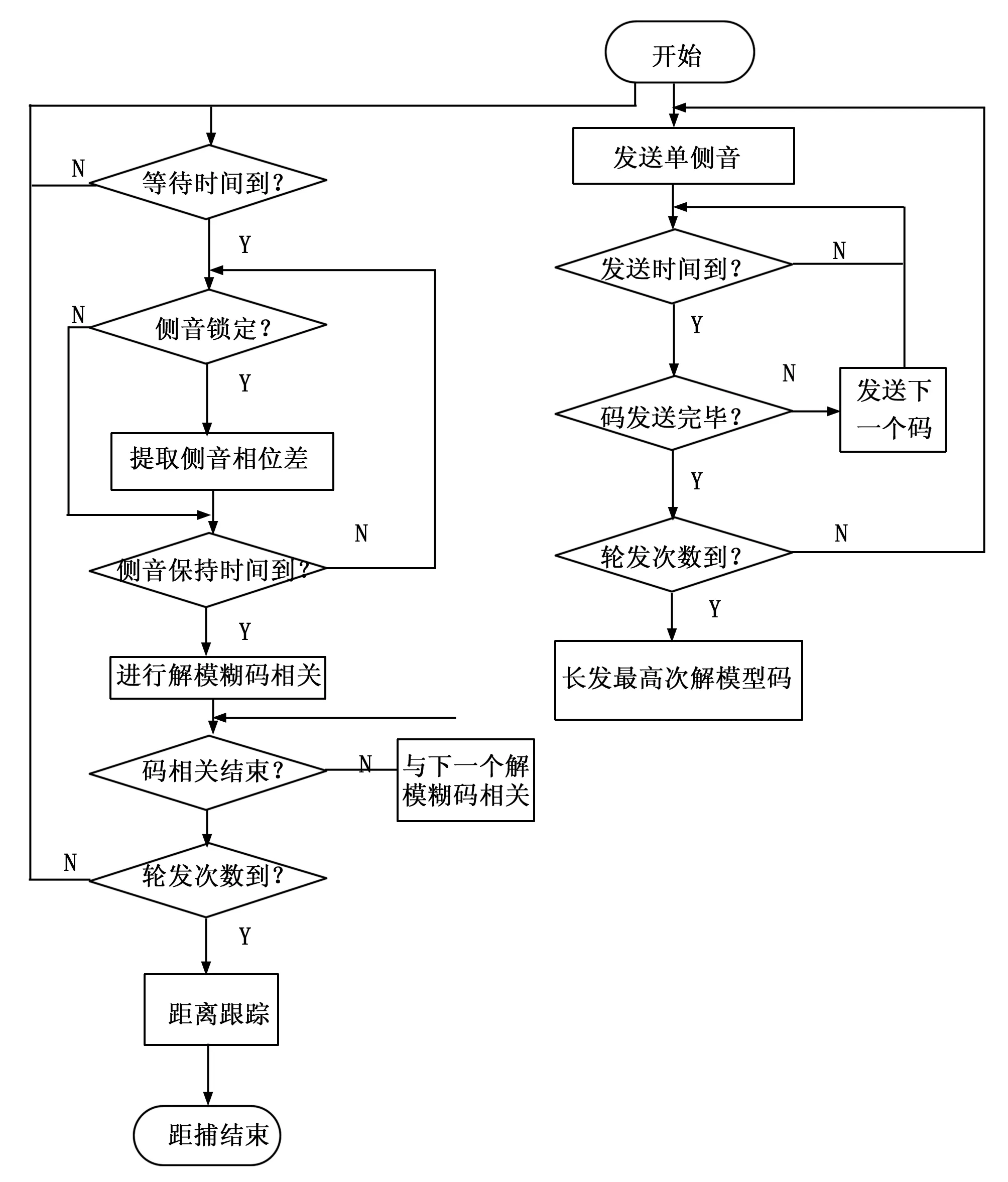
图3 音码测距捕获处理流程图
音码混合测距捕获阶段采用主音长发,码从低到高(从C1到C20)的顺序轮发。从最低频率解模糊码(C1)开始,按解模糊码频率从低到高的顺序依次进行距离匹配,对每一个解模糊码根据其对应的解模糊距离值L来进行解模糊。最低解模糊码的解模糊距离值L为距离预报值Rp(即L的初值为Rp),其他解模糊码的解模糊距离值L为上一个序列码的距离输出值。
(2)根据当前序列码的模糊周数ni和相位值φi,计算当前序列码的一个距离值Ri。
(5)
(4)将Ri作为当前序列码的距离输出。
(5)更新解模糊距离值L=Ri。
(6)循环执行120,直到主音匹配完成。
主音输出的距离R0即为最终距离,且距离匹配结果不会为负。
2.4 距离跟踪
距离捕获完成后,只发主侧音进行距离测量,即通过主侧音当前相位测量值对距离进行更新。距离跟踪采用如下算法:
(6)
由于相位取值在0°到360°之间,考虑到相位测量值的进周问题,Δφn+1的取值由式(7)确定。
(7)
通过以上算法,可以不断利用新得到的主侧音相位测量值对飞行器测量的距离进行更新,完成距离跟踪。如果飞行器相对于测控站的距离远远大于最低侧音的最大无模糊距离,这时需要根据飞行器相对于测控站的距离预报值Rp对最低侧音所测相位对应的一个周期内距离值L解距离模糊,得到无模糊空间距离值。
3 精度分析
3.1 测距误差分析

(8)
测距随机误差为:
(9)
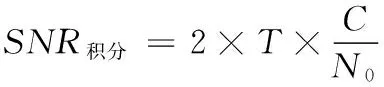
当ft=1.0 MHz,Ktone=22.5°,s/n0=10 dBHz,双边环路带宽为0.02 Hz时,音码测距随机误差为0.98。
3.2 距离捕获时间分析
距捕时间即测距捕获时间,指从上行测距信号发送到实现距离跟踪所需时间,主要包含测距信号环路锁定、距离解模糊等时间。
根据工程经验,环路锁定时间与环路带宽成反比,即ΔT环锁=5/BL。其中,BL为环路单边带宽,环路带宽的选择必须满足环路信噪比大于10 dB的要求。
根据以上原则对载躁比分别为10 dB和30 dBHz时的距捕时间进行估算,估算结果如表1所示。

表1 距离捕获时间估算结果
4 实验研究
搭建基于DSP和FPGA的全数字化控制平台,音码测距信号的产生、发送、捕获和同步处理均由系统自动完成。音码测距主侧音频率为1 MHz,载波环路带宽为500 Hz,AGC时间常数选择10 ms,测距双边环路带宽选择0.8 Hz,解模糊序列码个数为20个。无人机搭载联试应答机,地面测控系统进行跟踪实验,整个实验过程均在中强信号条件下进行。分别采用本文提出的音码混合测距和传统的纯侧音测距两种测距体制进行距离跟踪。
4.1 距离捕获时间分析
在每种距离测量体制跟踪过程中,人为使距离跟踪失锁,然后进行距离重捕,并记录距离捕获时间,实验结果如表2所示。
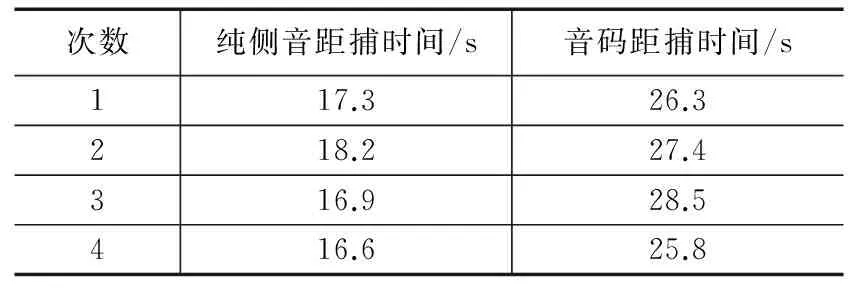
表2 距离捕获时间
根据3.2节距离捕获时间分析原则,纯侧音测距距离捕获时间理论估算值应为15.5 s,音码测距距离捕获时间理论估算应为22.5 s。实测结果略大于理论估算,是因为存在干扰信号和测量误差。音码混合测距捕获时间比纯侧音测距长,是因为纯侧音测距侧音个数只有9个,而音码测距解模糊码个数为20个。
4.2 测距误差分析
对两种测距体制的距离测量结果进行数据分析,结果如图4所示。
可以看出,本文提出的音码混合测距系统误差均值约为-4.4 m,且相对稳定;而传统的纯侧音测距系统误差均值为-8.7 m,且波动较大。因为传统的纯侧音测距主音频率为500 kHz,本文提出的音码混合测距主音频率为1 MHz,大大提高了距离测量精度;传统的纯侧音测距解模糊过程复杂,实现起来难度较大,使得距离测量精度降低,而音码混合测距采用解模糊序列码进行距离结算,易实现,且距离解算精度高。
5 总结
针对深空探测存在目标距离远、信号强度衰减大、信号传输时延大等特点,本文在分析纯侧音测距和伪码测距的基础上,设计了一套音码混合测距方案,详细分析了音码混合测距信号的发送、接收过程和距离解算、跟踪原理。最后进行了实验研究,结果表明,本文提出的测距方案系统测距误差较小,精度高。
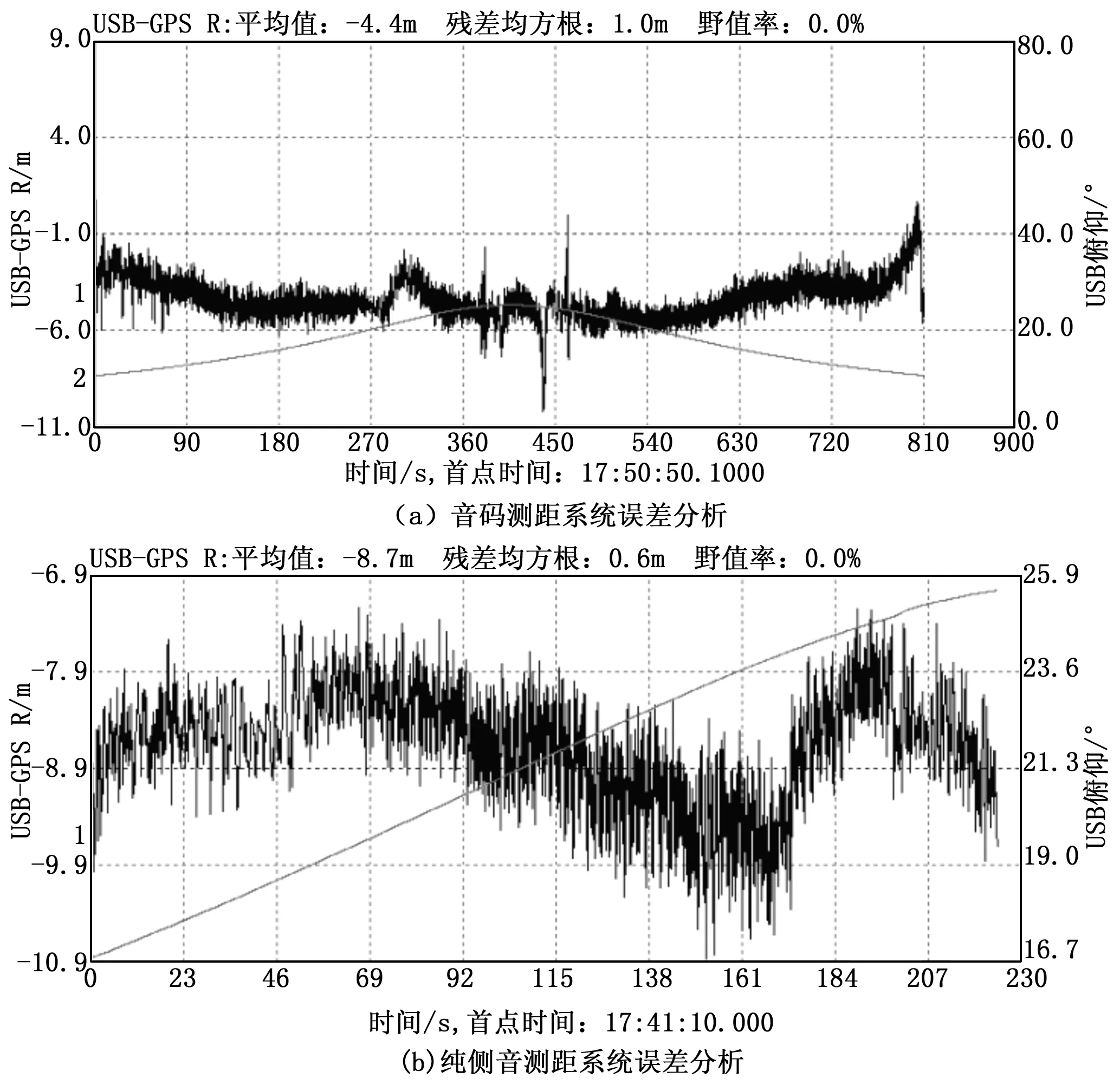
图4 测距系统误差分析
[1] 成亚勇.侧音测距在探月测控中的应用.无线电工程[J],2009(6):40-41.
[2] 杨勃航,刘 岩,王 雷.提高侧音测距系统无模糊距离的方法[J].电讯技术,2007(5):142-145.
[3] 杨建伟,王跃科,杨 俊.基于软件无线电的近距离扩频测距算法[J].测试技术学报,2006(1):60-64.
[4] 唐 军,谢澍霖,王卫星.航天扩频测控通信系统中伪码测距方法及精度分析[J]. 电讯技术,2006(4):91-95.
[5] 樊昌信.通信原理教程[M].北京:电子工业出版社,2011.
Application of Tone-code Ranging in Deep Space Exploration
Li Qiang, Tao Huatang
(China Satellite Maritime Tracking and Command Department ,Jiangyin 214400, China)
The deep space exploration has extremely long-range,large delay of signal round trip,weak signal and other characteristics, pure tone ranging and PN ranging are unable to meet the demand of deep space ranging. A method of tone-code ranging that is suitable to the deep space exploration was proposed, and the transmitting and reception timing of the ranging signal was analyzed in detail. Because of the large forecast deviation of ranging signal return time caused by long-range and large delay, some effective protective measures were taken to reduce the forecast deviations of the ranging signal return time and avoid the match mistakes. The process of ranging capture and tracking were elaborated, in which the phase cycle of tone-code considered fully, and the improvement measures were proposed to improve the accuracy of range measurement. The ranging accuracy and capture time were analyzed; the results show that the tone-code Ranging proposed in paper is with higher accuracy and shorter capture time. Finally, the experiment was carried out on fully Digitized Control platform constructed by DSP and FPGA, compared with pure tone ranging, the accuracy of tone-code was higher, and range value is more stable.
tone-code ranging; deep space exploration; range capture; range tracking
2015-12-05;
2016-01-28。
李 强(1985-),男,陕西彬县人,工程师,硕士研究生,主要从事航天测控系统方向的研究。
1671-4598(2016)07-0017-04
10.16526/j.cnki.11-4762/tp.2016.07.005
V11 文献标识码:A
