无轨胶轮车全液压制动系统故障诊断研究
2016-10-28刘志海杨凯迪张荣华李祥千李建忠
刘志海,杨凯迪,张荣华,李祥千,李建忠
(1.山东科技大学 交通学院,山东 青岛 266590;2.山东科技大学 机械电子工程学院,山东 青岛 266590;3.兖州煤业股份有限公司 兴隆庄煤矿,山东 济宁 272102;4.陕西正通煤业有限责任公司,陕西 咸阳 713600)
无轨胶轮车全液压制动系统故障诊断研究
刘志海1,杨凯迪2,张荣华2,李祥千3,李建忠4
(1.山东科技大学 交通学院,山东 青岛266590;2.山东科技大学 机械电子工程学院,山东 青岛266590;3.兖州煤业股份有限公司 兴隆庄煤矿,山东 济宁272102;4.陕西正通煤业有限责任公司,陕西 咸阳713600)
针对无轨胶轮车全液压制动系统长期工作在煤矿井下恶劣的环境中而易于发生故障的问题,提出了基于支持向量机的故障诊断方法。应用支持向量机回归估计算法建立全液压制动系统的故障预测辨识模型,将支持向量机模式分类算法应用于故障分离,并在Matlab环境下分别进行了故障检测与故障分离试验。试验结果表明,将支持向量机方法应用于无轨胶轮车全液压制动系统故障诊断中是完全可行的,可以有效提高故障检测效率和诊断准确率。
无轨胶轮车;全液压制动系统;支持向量机;故障诊断
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160930.1015.015.html
0 引言
随着现代化矿井的建设和高产高效工作面生产设备的采用,无轨胶轮车因其较高的运输效率得到广泛应用。为了满足煤矿井下特殊的使用条件,无轨胶轮车大多采用全液压双回路制动系统[1]。由于全液压制动系统长期在井下恶劣的环境中工作,系统中的蓄能器、充液阀、制动器及液压管路等难免会发生一些故障,导致车辆失去稳定性,造成矿井人员伤亡。因此,研究无轨胶轮车全液压制动系统的故障诊断对煤矿高效、安全生产具有重要意义。
无轨胶轮车全液压制动系统是一种典型的液压系统,其故障诊断可通过分析系统失效形式和故障机理,对状态检测信号进行模式识别或分类来实现。现有的液压系统故障智能诊断方法[2]主要有故障树(FTA)[3]方法、BP神经网络[4]方法、专家系统(ES)[5]方法等。FTA方法是将系统故障形成的原因由总体至局部按树状进行逐步细化的分析方法,应用FTA原理无法快速将故障定位到真正发生问题的底事件,因此,将FTA方法应用于故障诊断尤其是在线诊断还存在很大限制。BP神经网络方法能学习和存储大量的输入与输出模式映射关系,但是训练速度较低、容易隐入局部最小值,并且对样本的数量和质量要求较高。ES是一种基于知识的应用系统软件,可用来解决只有专家才能解决的困难问题,但对于诊断知识不完备的诊断对象,在实际应用中很难获得理想效果。
基于以上方法存在的问题,为了更好地适应小样本情况,得到现有信息条件下的最优解,提出将支持向量机(Support Vector Machine,SVM)方法[6]应用于无轨胶轮车全液压制动系统故障诊断中。从理论上讲,SVM方法得到的是全局最优解,克服了其他方法易陷入局部极值的问题。同时,SVM方法可以保证较高的故障诊断准确率和诊断效率,为无轨胶轮车全液压制动系统的故障诊断提供了一种智能有效的方法。
1 SVM方法
1.1SVM非线性回归估计算法
样本训练集D={(xi,yi)|i=1,2,…,N},xi∈Rn,yi∈R,N为样本数。对于非线性回归SVM,用于估计训练集的非线性回归函数为
(1)
式中:ω为超平面法线;φ(xi)为非线性映射;b为截距。
训练集D中的N个样本(xi,yi)均满足以下约束条件:
(2)
优化目标为
(3)
式中C为规则化参数。
构造拉格朗日函数为

(4)
根据KKT[7]条件,转化为对偶问题求解:
(5)
式中[φT(xi)·φ(xj)] 可由核函数K(xi,xj)替代。
得到非线性支持向量回归(Support Vector Regression,SVR)的回归函数为
(6)

1.2SVM非线性分类算法
对于支持向量机模式分类( Support Vector Machine Classification,SVC)问题,取训练集D={(xi,yi)|i=1,2,…,N},xi∈Rn,yi∈{±1}。非线性映射将输入向量x从原空间Rn映射到一个高维空间Z,在高维空间中构造最优线性分类超平面y=(ωT·φ(xi))+b,空间中的分类约束条件为
(7)
定义拉格朗日函数为

{yi[(ωT·φ(xi))+b]+ξi-1}
(8)
对ω,b和ξi求偏导数,然后根据Mercer[9]条件,用核函数K(xi,xj)代替内积[φT(xi)·φ(xj)],转化为拉格朗日对偶问题:
(9)
求解式(9)得到的最优分类函数为
(10)
2 全液压制动系统故障诊断原理
基于SVM的全液压制动系统故障诊断过程主要分为辨识建模、故障检测及故障分离3个阶段,故障诊断原理如图1所示。

图1 基于SVM的全液压制动系统故障诊断原理
图1中,全液压制动系统在每k个采样时刻的实际输入为u(k),实际输出为y(k),k=1,2,…,N,m、n分别为输入/输出的延迟,TDL表示多分头时延系统,故障预测辨识模型为
yp(k)=fSVM[(y(k-1),y(k-2),…,y(k-n),
u(k-1),u(k-2),…,u(k-m)]
(11)
故障预测辨识建模就是对SVM进行训练的过程,针对样本对{u(k),y(k)}构造训练集:

(12)
X(k-m)={y(k-1),y(k-2),…,y(k-n),
u(k-1),u(k-2),…,u(k-m)}
(13)
Y(k-m)=y(k)
(14)
应用SVR算法建立全液压制动系统故障预测辨识模型fSVM(·),并选择模型参数(包括核函数及其参数、规则化参数C、不敏感度ε),然后通过所给的训练集D对fSVM(·)进行训练并计算残差值e(k),直至残差满足要求为止。最终确定一组最优的模型参数,从而得到性能良好的故障预测模型。
在实际情况下,由于噪声等其他因素的影响,残差不可能完全等于零。因此,在辨识建模时必须为残差设置一个检测阈值,依据阈值逻辑即可实现故障检测,进而实现故障分离,检测阈值的判断方程为
(15)
式中δ为检测阈值,δ>0。
3 全液压制动系统故障诊断试验
3.1构造训练集
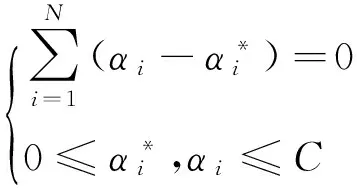
全液压制动系统的典型故障为车辆制动距离长,制动力不够。产生此类故障的主要原因是蓄能器充气压力过低、制动阀输出压力过低等。因此,制动过程中蓄能器充液压力及制动阀出口压力的动态特性对分析系统故障具有重要意义。以WCJ12E型多功能防爆无轨胶轮车为研究对象,分别在前后桥蓄能器出口、制动阀出口处安装压力传感器,在制动踏板处安装踏板力传感器,建立的测试系统如图2所示。
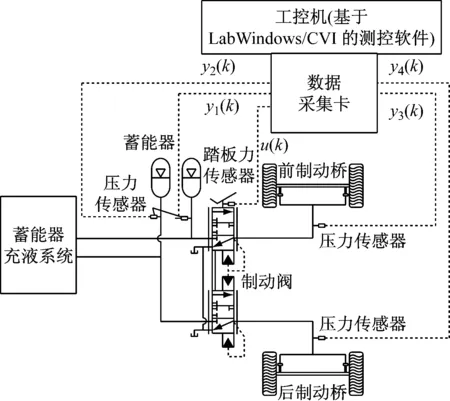
图2 测试系统
初始化测试系统的采样时间为ts=0.01 s,样本数N=200,然后给制动踏板施加时间t=tsN=2 s的紧急制动力,得到每一采样时刻k的4个样本对{u(k),y1(k)}、{u(k),y2(k)}、{u(k),y3(k)}、{u(k),y4(k)},k=1,2,…,200。其中,u(k)为踏板力传感器信号;y1(k)、y2(k)分别为前、后桥蓄能器压力;y3(k)、y4(k)分别为前、后桥制动器出口压力。取输入/输出延迟m=n=2,分别按照式(12)—式(14)构造SVM训练集:前桥蓄能器训练集D1={X(k-2),Y1(k-2)}、 后桥蓄能器训练集D2={X(k-2),Y2(k-2)}、前桥制动器训练集D3={X(k-2),Y3(k-2)}、后桥制动器训练集D4={X(k-2),Y4(k-2)},k=3,4,…,200。
3.2辨识建模
分别选取d阶多项式核函数和RBF核函数,在Matlab环境下应用SVR算法建立故障预测辨识模型,通过构造的4个训练集分别对各个辨识模型进行训练,得到如下模型参数:不敏感度ε=10-3,规则化参数C=500,RBF核函数宽度σ2=4,d阶多项式核函数宽度d=4。在上述参数状态下,各故障预测辨识模型的残差变化曲线如图3所示。
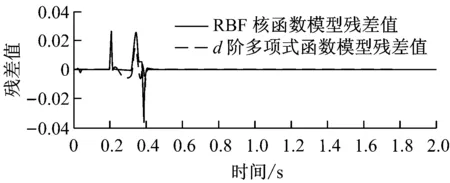
(a) 前桥蓄能器压力预测模型残差值
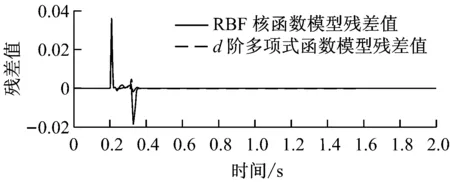
(b) 后桥蓄能器压力预测模型残差值
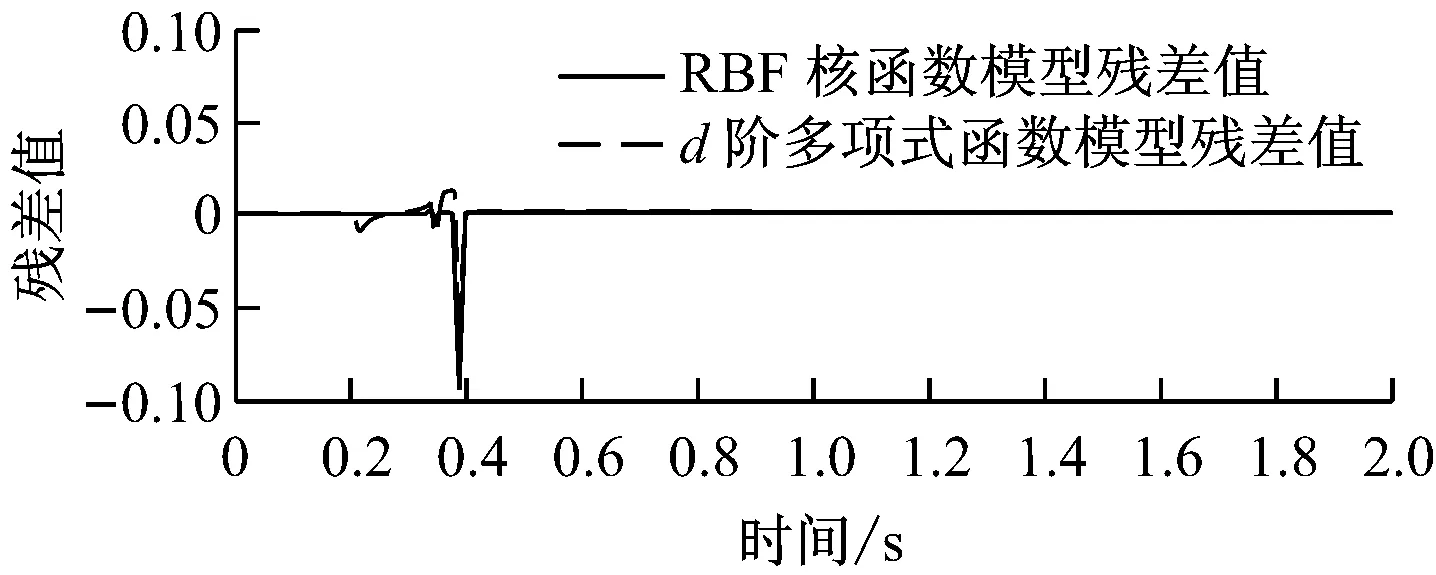
(c) 前桥制动器压力预测模型残差值

(d) 后桥制动器压力预测模型残差值
从图3可看出,核函数不同,建模残差也会有很大变化,但总体来看各个模型的残差值精度均比较高,表明用SVR算法所建立的预测辨识模型具有较好的推广能力。
为了更好地对比2类不同核函数的SVR预测辨识模型的性能,选取均方根误差(RMSE)来衡量建模效果,均方根误差定义:
(16)
2类SVR预测辨识模型的均方根误差和运算耗时见表1。
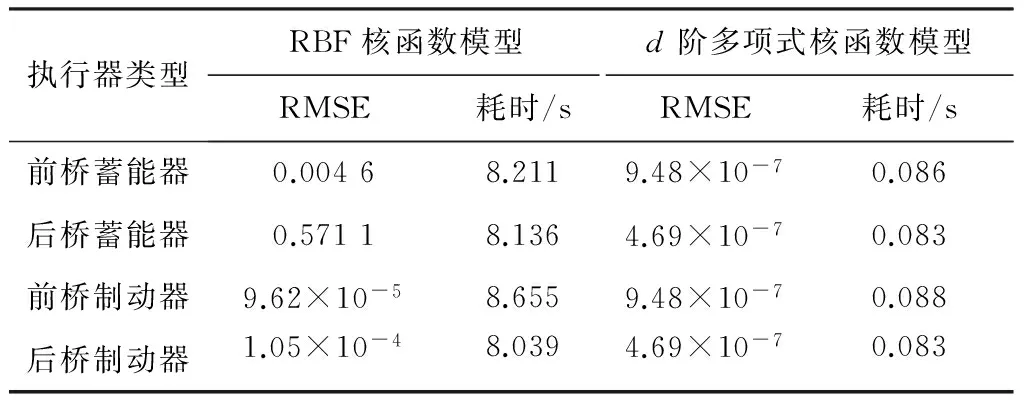
表1 2类SVR预测辨识模型性能分析
从表1明显看出,基于d阶多项式核函数的预测辨识模型在预测精度和运算速度方面均明显优于RBF核函数模型,因此,在全液压制动系统的故障诊断中具有更好的推广能力和诊断效率。
3.3故障检测试验
由于样本的采集是在无故障的情况下获取的,且全液压制动系统故障的发生具有一定的突发性,一般不可重复或模拟,因此,故障输出和残差检测阈值的选取均需要通过计算机仿真实现。依次设定制动系统的输出压力y1(k)、y2(k)、y3(k)、y4(k)在t=0.6 s和t=1.8 s(即采样时刻k=t/ts)时降低到正常情况的0.1~0.3倍。选取建立的基于d阶多项式核函数的SVR预测辨识模型对上述4处压力进行故障检测,检测效果如图4所示。
从图4可看出,当系统发生故障时,基于d阶多项式核函数的SVR预测辨识模型产生的残差值发生突变,故能够根据残差阈值及时检测出故障,4个基于d阶多项式核函数的SVR预测辨识模型的诊断耗时见表2。经对比发现:各个预测辨识模型运行耗时均在10-6—10-3数量级,具有较高的诊断效率。
表2 SVR预测辨识模型故障诊断耗时
3.4故障分离试验
利用预测辨识模型检测出故障后,还需要进一步对各类故障进行分离。给正常样本和故障样本数据标定分类标签[10],标签“1”代表无故障情况,标签“2”、“3”、“4”、“5”分别代表前桥蓄能器、前桥制动器、后桥蓄能器、后桥制动器故障。基于SVC算法,采用“libsvm”工具箱[11]中相关分类模型进行故障分离试验,故障分离效果如图5所示。结果表明,故障诊断准确率高达96.633 7%。
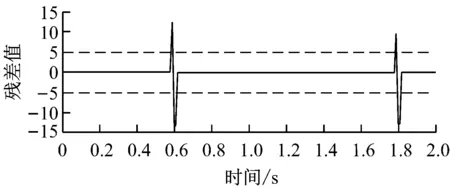
(a) 前桥蓄能器残差曲线
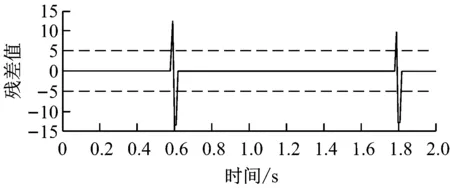
(b) 后桥蓄能器残差曲线
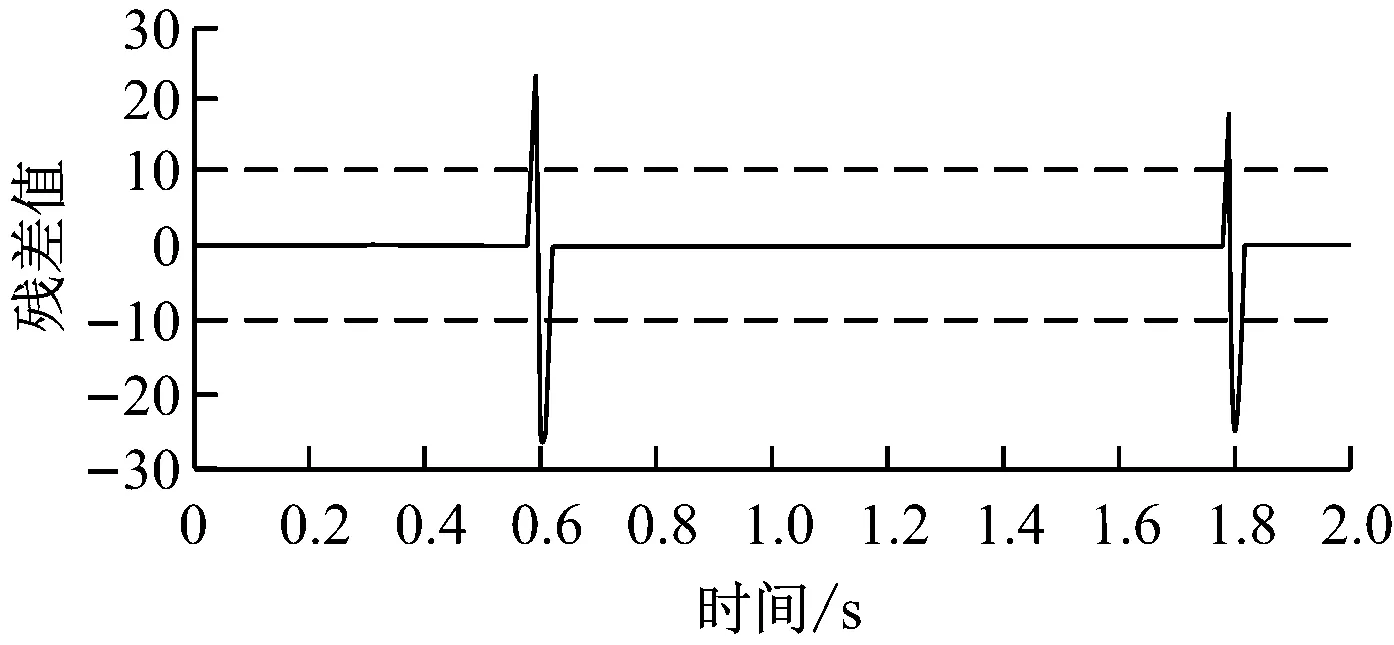
(c) 前桥制动器残差曲线

(d) 后桥制动器残差曲线
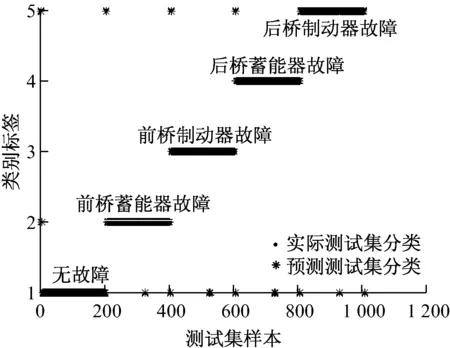
图5 故障分离效果
4 结语
利用SVM方法在解决小样本问题中所具有的独特优势,提出将SVM方法应用于无轨胶轮车全液压制动系统的故障诊断中。应用SVR算法建立故障预测辨识模型,将SVC算法应用于故障分离,然后分别进行了故障检测与故障分离仿真试验。试验结果表明,基于SVM的全液压制动系统故障诊断方法具有较高的预测精度和诊断准确率,同时可以有效提高诊断效率。
[1]陈永峰,刘杰,王彦清,等.WC5E 型防爆胶轮车全液压制动系统设计研究[J].煤矿机械,2010,31(3):26-28.
[2]黄志坚.液压系统故障智能诊断与监测[M].北京:电子工业出版社,2013.
[3]唐宏宾,吴运新.基于T-S模糊故障树的混凝土泵车泵送液压系统故障诊断[J].计算机应用研究,2012,29(2):561-568.
[4]曹凤才,岳凤英.基于BP神经网络的液压系统故障诊断研究[J].中北大学学报(自然科学版),2010,31(6):596-599.
[5]刘治国,蔡增杰,穆志韬,等.基于CLIPS的飞机液压系统故障诊断专家系统构建研究[J].海军航空工程学院学报,2011,26(1):45-48.
[6]乔志刚.基于网格搜索和支持向量机的矿用风机故障诊断研究[J].中州煤炭,2015(2):81-83.
[7]BOYD S,VANDENBERGHE L.Convex optimization[M].Cambridge:Cambridge University Press,2004.
[8]FLACH P.Machine learning:the art and science of algorithms that make sense of data first edition[M].段菲,译.北京:人民邮电出版社,2016.
[9]VAPNIK V N.The nature of statistical learning theory [M].张学工,译.北京:清华大学出版社,2000.
[10]李萌.基于支持向量机的汽车ESP系统故障诊断[D].长春:吉林大学,2011.
[11]王小川,史峰,郁磊,等.Matlab神经网络43个案例分析[M].北京:北京航空航天大学出版社,2011.
Fault diagnosis research for full hydraulic braking system of trackless tyred vehicle
LIU Zhihai1,YANG Kaidi2,ZHANG Ronghua2,LI Xiangqian3,LI Jianzhong4
(1.Transportation College,Shandong University of Science and Technology,Qingdao 266590,China; 2.College of Machinery and Electronics Engineering,Shandong University of Science and Technology, Qingdao 266590,China; 3.Xilongzhuang Coal Mine,Yanzhou Coal Mining Co.,Ltd., Jining 272102,China; 4.Shaanxi Zhengtong Coal Mining Co.,Ltd.,Xianyang 713600,China)
To solve problem that full hydraulic braking system of trackless tyred vehicle was prone to failure in harsh environment of coal mine,a fault diagnosis method based on support vector machine was proposed.The support vector machine regression estimate algorithm was applied to establish fault prediction model of the full hydraulic braking system,while pattern classification algorithm was used to isolate fault,and fault diagnosis tests and isolation experiments were carried out in Matlab environment.The experiment results show that it is entirely feasible to use fault diagnosis method based on support vector machine to diagnose fault of full hydraulic braking system of trackless tyred vehicle,which can improve fault detection efficiency and diagnostic accuracy.
trackless tyred vehicle; full hydraulic braking system; support vector machine; fault diagnosis
1671-251X(2016)10-0030-05DOI:10.13272/j.issn.1671-251x.2016.10.007
刘志海,杨凯迪,张荣华,等.无轨胶轮车全液压制动系统故障诊断研究[J].工矿自动化,2016,42(10):30-34.
2016-04-15;
2016-06-16;责任编辑:张强。
国家自然科学基金项目(51375282);山东省科技发展计划课题(2014GGX103043);山东省科技重大专项项目(2015ZDXX0601C01);山东省研究生教育创新计划项目(SDYY14084)。
刘志海(1972-),男,山东新泰人,副教授,主要研究方向为故障诊断、专家系统、信息技术等,E-mail:zhihliu@sdust.edu.cn。
TD525
A网络出版时间:2016-09-30 10:15
